
Abstract
This paper presents a new type of amphibious spherical robots. The robot includes four drive units. Each drive unit consists of two servo motors, a water-jet propeller, a DC motor and a wheel. The robot can constitute three movement structure ways according to the environment. When the robot enters water, it adopts water jet propulsion. According to different land conditions, there are two movement patterns to switch. One is a quadruped movement pattern which is available to climb over obstacles; the other is a driving wheel movement pattern which is used to speed up the movement of robot under the flat terrain. Characteristic evaluation experiments on land for a novel amphibious spherical robot were conducted. Underwater motions of the robot mainly rely on the four water-jet propellers, it is necessary to measure relationship between actuating force of the water-jet propeller and the duty ratio. Gambit software is employed to establish and mesh the water-jet propulsion model. Simulation analysis of the models is implemented by FLUENT software. Localization control of the robot and wireless control of the robot were conducted. Finally, experiment results indicated that the developed novel amphibious spherical robot is feasible to develop marine resources and implement marine missions.






























Similar content being viewed by others

References
Cai R, Chen Y, Lang L et al (2013) Inverse kinematics of a new quadruped robot control method. Int J Adv Robot Syst 10(46):1–8
Dey BB, Manjanna S, Dudek G (2013) Ninja legs: amphibious one degree of freedom robotic legs. In: 2013 IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 5622–5628
Endo G, Hirose S (1999) Study on roller-walker. IEEE Int Conf Robot Autom 1:2032–2237
FLUENT 6.3 User’s Guide (2006) FLUENT Inc.
GAMBIT 2 User’s Guide (2001) FLUENT Inc.
Guo S, Du J, Ye X et al (2010) Real-time adjusting control algorithm for the spherical underwater robot. Information 13(6):2021–2029
Guo S, Du J, Ye X et al (2011) The computational design of a water jet propulsion spherical underwater vehicle. In: Proceedings of the 2011 IEEE international conference on mechatronics and automation, pp 2375–2379
Guo S, Mao S, Shi L et al (2012a) Design and kinematic analysis of an amphibious spherical robot. In: Proceedings of the 2012 IEEE international conference on mechatronics and automation, pp 2214–2219
Guo S, Shi L, Xiao N, Asaka K (2012b) A biomimetic underwater microrobot with multifunctional locomotion. Robot Auton Syst 60(12):1472–1483
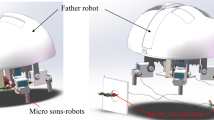
Guo S, Mao S, Shi L et al (2013) Development of an amphibious mother spherical robot used as the carrier for underwater microrobots. In: Proceedings of the 2012 ICME international conference on complex medical engineering, pp 758–762
Halme A, Schonberg T, Wang Y (1996) Motion control of a spherical mobile robot. In: Proceedings of the 1996 4th international workshop on advanced motion control, Vol 1, pp 259–264
He Y, Guo S, Shi L (2015) Preliminary mechanical analysis of an improved amphibious spherical father robot, microsystem technologies (in press)
Kazemi H, Majd VJ et al (2013) Modeling and robust backstepping control of an underactuated quadruped robot in bounding motion. Robotica 31(03):423–439
Lan X, Sun H, Jia Q (2010) Principle and dynamic analysis of a new-type spherical underwater vehicle. J Beijing Univ Posts Telecommun 33(3):20–23
Li Y, Guo S, Yue C (2015a) Preliminary concept of a novel spherical underwater robot. Int J Mechatron Autom 5(1):11–21
Li M, Guo S, Hirata H, Ishihara H (2015b) Design and performance evaluation of an amphibious spherical robot. Robot Auton Syst 64:21–34
Lin X, Guo S, Yue C et al (2013) 3D modelling of a vectored water jet-based multi-propeller propulsion system for a spherical underwater robot. Int J Adv Rob Syst 10(80):1–8
Loc V-G, Koo IM, Tran DT et al (2012) Body workspace of quadruped walking robot and its applicability in legged locomotion. J Intell Robot Syst 67(3–4):271–284
Marani G, Choi SK, Yuh J (2009) Underwater autonomous manipulation for intervention missions AUVs. Ocean Eng 36(1):15–23
Mazumdar A, Asada HH (2011) A compact underwater vehicle using high-bandwidth coanda-effect valves for low speed precision maneuvering in cluttered environments. In: IEEE international conference on robotics and automation, pp 1544–1550
Mazumdar A, Asada HH (2013) Pulse width modulation of water jet propulsion systems using high-speed coanda-effect valves. J Dyn Syst Meas Contr 135:051019
Mazumdar A, Lozano M, Fittery A, Asada HH (2012) A compact, manoeuvrable, underwater robot for direct inspection of nuclear power piping systems. In: IEEE international conference on robotics and automation, pp 2818–2823
Mazumdar A, Fittery A, Ubellacker W, Asada HH (2013) A ball-shaped underwater robot for direct inspection of nuclear reactors and other water-filled infrastructure. In: IEEE international conference on robotics and automation, pp 3400–3407
Pan S, Shi L, Guo S (2015) A kinect-based real-time compressive tracking prototype system for amphibious spherical robots. Sensors 15(4):8232–8252
Ryuha Y-S, Yanga G-H, Liu J, Huo H (2015) A school of robotic fish for mariculture monitoring in the sea coast. J Bionic Eng 12(1):37–46
Saout O, Ananthakrishnan P (2011) Hydrodynamic and dynamic analysis to determine the directional stability of an underwater vehicle near a free surface. Appl Ocean Res 33(2):158–167
Shen S-Y, Li C-H, Cheng C-C et al. (2009) Design of a leg-wheel hybrid mobile platform. In: The 2009 IEEE/RSJ international conference on intelligent robots and systems, pp 4682–4687
Shi L, Guo S, Asaka K (2011) A bio-inspired underwater microrobot with compact structure and multifunctional locomotion. In: Proceedings of IEEE/ASME international conference on advanced intelligent mechatronics, pp 203–208
Shi L, Guo S, Mao S (2013) Development of an amphibious turtle-inspired spherical mother robot. J Bionic Eng 10(4):446–455
Ting MC, Abdul Mujeebu M, Abdullah MZ, Arshad MR (2012) Numerical study on hydrodynamic performance of shallow underwater glider platform. Indian J Geo Mar Sci 41(2):124–133
Wan F, Guo S, Ma X et al. (2014) Characteristic analysis on land for an amphibious spherical robot. In: Proceedings of 2014 IEEE international conference on mechatronics and automation, pp 1945–1950
Watson SA, Crutchley DJP, Green PN (2012) The mechatronic design of a micro-autonomous underwater vehicle (μAUV). Mechatron Autom 2(3):157–168
Yue C, Guo S, Shi L (2013a) Hydrodynamic analysis of the spherical underwater robot SUR-II. Int J Adv Rob Syst 10:1–12
Yue C, Guo S, Li M (2013) ANSYS FLUENT-based modeling and hydrodynamic analysis for a spherical underwater robot. In: Proceedings of 2013 IEEE international conference on mechatronics and automation, pp 1577–1581
Yue C, Guo S, Li M et al (2015) Mechantronic system and experiments of a spherical underwater robot: SUR-II. J Intell Robot Syst (in press)
Yue C, Guo S, Shi L (2015) Design and performance evaluation of a biomimetic microrobot for the father–son underwater intervention robotic system. Microsystem Technologies (in press)
Yue C, Guo S, Li M (2015) Characteristics evaluation of a biomimetic microrobot for a father-son underwater intervention robotic system. In: 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS), pp 171–176
Acknowledgments
This research is partly supported by National Natural Science Foundation of China (61375094), Key Research Program of the Natural Science Foundation of Tianjin (13JCZDJC26200), and National High Tech. Research and Development Program of China (2015AA043202).
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Guo, J., Guo, S. & Li, L. Design and characteristic evaluation of a novel amphibious spherical robot. Microsyst Technol 23, 1999–2012 (2017). https://doi.org/10.1007/s00542-016-2961-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-016-2961-9