
Abstract
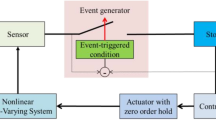
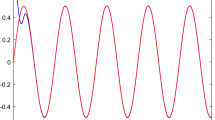
This article considers a fuzzy adaptive event-triggered control design problem for electro-hydraulic systems. The addressed electro-hydraulic system contains immeasurable states and unknown nonlinear dynamics. Fuzzy logic systems (FLSs) are utilized to model the controlled electro-hydraulic system, and a state observer is formulated to get the estimations of the immeasurable states. Subsequently, a novel event-triggered strategy is introduced by using first-order filter technique, which can reduce the frequent updating of the voltage input. Then, by constructing composite Lyapunov functions, an observer-based fuzzy adaptive event-triggered control method is presented. The stability of the controlled electro-hydraulic system and the convergence of the tracking error are proved. Finally, the computer-simulated studies confirm the effectiveness of the presented control method.










Similar content being viewed by others

Data availability statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
Guan C, Pan S (2008) Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters. IEEE Transactions on Control Systems Technology 16(3):434–445
Guan C, Pan S (2008) Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters. Control Engineering Practice 16(11):1275–1284
Ding R, Cheng M, Jiang L, Hu G (2021) Active fault-tolerant control for electro-hydraulic systems with an independent metering valve against valve faults. IEEE Transactions on Industrial Electronics 68(8):7221–7232
Guo Q, Zhang Y, Celler BG, Su SW (2016) Backstepping control of electro-hydraulic system based on extended-state-observer with plant dynamics largely unknown. IEEE Transactions on Industrial Electronics 63(11):6909–6920
Yao B, Bu F, Reedy J et al (2000) Adaptive robust motion control of single-rod hydraulic actuators: theory and experiments. IEEE/ASME Transactions on Mechatronics 5(1):79–91
Yao J, Jiao Z, Ma D (2014) Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Transactions on Industrial Electronics 61(11):6285–6293
Kim W, Won D, Shin D, Chung CC (2012) Output feedback nonlinear control for electro-hydraulic systems. Mechatronics 22(6):766–777
Wang L-X (1993) Stable adaptive fuzzy control of nonlinear systems. IEEE Transactions on Fuzzy Systems 1(2):146–155
Costa Branco P. J, Dente J. A (2000) On using fuzzy logic to integrate learning mechanisms in an electro-hydraulic system. I. actuator’s fuzzy modeling, IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), vol. 30, no. 3, pp. 305-316,
Guo Q, Chen Z (2021) Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty. Mechanical Systems and Signal Processing 146:106869
Yang Y, Li Y, Liu X, Huang D (2022) Adaptive neural network control for a hydraulic knee exoskeleton with valve deadband and output constraint based on nonlinear disturbance observer. Neurocomputing 473:14–23
Sui S, Chen CLP, Tong S (2021) Event-trigger-based finite-time fuzzy adaptive control for stochastic nonlinear system with unmodeled dynamics. IEEE Transactions on Fuzzy Systems 29(7):1914–1926
Wang W, Li Y (2021) Observer-Based Event-Triggered Adaptive Fuzzy Control for Leader-Following Consensus of Nonlinear Strict-Feedback Systems. IEEE Transactions on Cybernetics 51(4):2131–2141
Zhang Z, Wen C, Xing L, Song Y (2022) Adaptive Event-Triggered Control of Uncertain Nonlinear Systems Using Intermittent Output Only. IEEE Transactions on Automatic Control 67(8):4218–4225
Cheng P, He S, Stojanovic V, Luan X, Liu F (2022) Fuzzy fault detection for Markov jump systems with partly accessible hidden information: an event-Triggered approach. IEEE Transactions on Cybernetics 52(8):7352–7361
Diao S, Sun W, Su S-F, Xia J (2022) Adaptive fuzzy event-triggered control for single-link flexible-joint robots with actuator failures. IEEE Transactions on Cybernetics 52(8):7231–7241
Li M, Li T, Gao X et al (2020) Adaptive NN event-triggered control for path following of underactuated vessels with finite-time convergence. Neurocomputing 379:110–119
Zhang G, Yao M, Xu J, Zhang W (2020) Robust neural event-triggered control for dynamic positioning ships with actuator faults. Ocean Engineering 207:107292
Song J, Wang Y-K, Niu Y, Lam H-K, He S, Liu H (2022) Periodic event-triggered terminal sliding mode speed control for networked PMSM system: a GA-optimized extended state observer approach. IEEE/ASME Transactions on Mechatronics 27(5):4153–4164
Li Y, Zhao Y, Liu W, Hu J. Adaptive fuzzy predefined-time control for third-order heterogeneous vehicular platoon systems with dead-zone, IEEE Transactions on Industrial Informatics, https://doi.org/10.1109/TII.2022.3221220.
Li Y, Yu K (2022) Adaptive Fuzzy Decentralized Sampled-Data Control for Large-Scale Nonlinear Systems. IEEE Transactions on Fuzzy Systems 30(6):1809–1822
Wang W, Li Y. M,(2021) Distributed fuzzy optimal consensus control of state-constrained nonlinear strict-feedback systems, IEEE Transactions on Cybernetics, https://doi.org/10.1109/TCYB.2021.3140104
Acknowledgements
This work is supported by the National Natural Science Foundation of China (under Grant No. 62173172).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared that they have no conflicts of interest to this work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Jiang, C., Tong, Sc. & Dai, W. Fuzzy adaptive event-triggered output feedback control of electro-hydraulic system. Neural Comput & Applic 35, 14885–14896 (2023). https://doi.org/10.1007/s00521-023-08469-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-023-08469-1