
Abstract
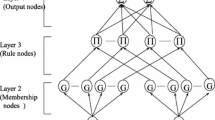
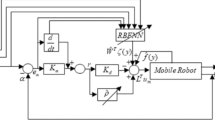
The aim of this paper is to design a robust adaptive neural network-based hybrid position/force control scheme for robot manipulators in the presence of model uncertainties and external disturbance. The feedforward neural network employed to learn a highly nonlinear function requires no preliminary learning. The control purposes are to achieve the stability in the sense of Lyapunov for desired interaction force between the end-effector and the environment and to regulate robot tip position in cartesian space. An adaptive compensator is also developed to eliminate the effect of disturbance term of neural network approximation error and external disturbance or unmodeled dynamics etc. A key feature of this compensator is that the prior information of the disturbance bound is not required. Finally, a comparative simulation study with a model-based robust control scheme for a two-link robot manipulator is presented.























Similar content being viewed by others

References
Raibert MH, Craig JJ (1981) Hybrid position/force control of manipulators. ASME J Dyn Syst Measure Control 103(2):126–133
Lozano R, Brogliato B (1992) Adaptive hybrid position/force control of redundant manipulators. IEEE Trans Autom Control 37(10):1501–1505
Yoshikawa T, Sudou A (1993) Dynamic hybrid position/force control of robot manipulators: online-estimation of unknow constraint. IEEE Trans Robot Autom 9(2):220–226
Kwan CM (1996) Robust adaptive force/motion control of constrained robots. IEE Proc Control Theor Appl 143(1):103–109
Xiao D, Ghosh BK, Ning X, Tarn TJ (2000) Dynamic hybrid position/force control of a robot manipulator in an uncalibrated environment. IEEE Trans Control Syst Technol 8(4):635–645
Kouya DN, Saad M, Lamarche L (2002) Backstepping adaptive hybrid force/position control of robotic manipulators. Proceeding of the American control confrence, pp 4595–4600
Roy J, Whitcomb LL (2002) Adaptive force control of position/velocity controlled robots: theory and experiment. IEEE Trans Robot Autom 18(2):121–137
Cheah CC, Zhao Y, Slotine JJE (2006) Adaptive Jacobian motion and force control for constrained robots with uncertainties, Proceeding of the international conference on robotics and automation, pp 2226–2231
Kouya DN (2008) Adaptive hybrid force-position control of a robotic manipulator. 2nd European computing confrence, pp 323–331
Filaretov VF, Zuev AV (2008) Adaptive force/position control of robot manipulators. Proceedings of the 2008 IEEE/ASME international conference on advanced intelligent mechatronics, pp 96–101
Wnag H, Xie Y (2009) Adaptive Jacobian position/force tracking control of free-flying manipulators. Robot Auton Syst 57:173–181
Huang Q, Enomoto R (2008) Hybrid position, posture, force and moment control of robot manipulators. Proceedings of the IEEE international conference on robotics and biomimetics, pp 1444–1450
Lewis FL, Jagannathan S, Yesildirek A (1999) Neural network control of robot manipulators and nonlinear systems. Taylor and Francis, UK
Lewis FL, Yesildirek A, Liu K (1996) Multilayer neural net robot controller with quaranted tracking performance. IEEE Trans Neural Netw 7(2):388–399
Kumar N, Panwar V, Sukavanam N, Sharma SP, Borm JH (2011) Neural network based hybrid force/position control for robot manipulators. Int J Precis Eng Manuf 12(3):419–426
Panwar V, Sukavanam N (2007) Design of optiamal hybrid position/ force controller for a robot manipulator using neural networks. Math Probl Eng 23:ID 65028
Karayiannidis Y, Rovithakis G, Doulgeri Z (2007) Force/position tracking for a robotic manipulator in compliant contact with a surface using neuro-adaptive control. Automatica 43:1281–1288
Ferguene F, Toumi R (2009) Dynamic external force feedback loop control of a robot manipulator using a neural network compensator-application to the trajectory following in an unknown enviroment. Int J Appl Math Comput Sci 19(1):113–126
Bechlioulis CP, Doulgeri Z, Rovithakis GA (2010) Neuro-adaptive force/position control with prescribed performance and guaranteed contact maintenance. IEEE Trans Neural Netw 21(12):1857–1868
Singh HP, Sukavanam N (2012) Neural network based control scheme for redundant robot manipulators subject to multiple self-motion criteria. Math Comput Model 55:1275–1300
Kwan C, Dawson DM, Lewis FL (2001) Robust adaptive control of robots using neural network: global stability. Asian J Control 3(2):111–121
Acknowledgments
This work is financially supported by the Council of Scientific and Industrial Research (CSIR), New Delhi, India, through file No. 09/143(0624)/2008-EMR-I.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Singh, H.P., Sukavanam, N. Stability analysis of robust adaptive hybrid position/force controller for robot manipulators using neural network with uncertainties. Neural Comput & Applic 22, 1745–1755 (2013). https://doi.org/10.1007/s00521-012-0966-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-012-0966-6