
Abstract
Background
Laparoscopic surgical techniques are difficult to learn, and developing such skills involves a steep learning curve. To ensure surgeons achieve a high skill level, it is important to be able to measure and assess their skills. Therefore, it is necessary to understand the performance differences between experienced and novice surgeons, as such information could be used to help surgeons learn laparoscopic skills. We examined the differences in gripping and reaction force between experienced and novice surgeons during laparoscopic surgery.
Methods
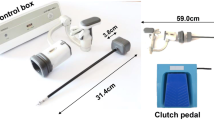
We measured the gripping force generated during laparoscopic surgery performed on pigs using forceps with pressure sensors. Several sensors, including strain gauges, accelerometers, and a potentiometer, were attached to the forceps. This study included 4 experienced and 4 novice surgeons. Each subject was asked to elevate the kidney in order to approach the renal hilus using the forceps. Throughout the experiment, we measured the gripping force and reaction force generated during the movement of the forceps in real time.
Results
The experienced and novice surgeons exhibited similar reaction force levels. Conversely, gripping force differed significantly between the groups. The experienced and novice surgeons exhibited mean gripping force levels of 3.06 and 7.15 N, respectively. The gripping force standard deviation values for the experienced and novice surgeons were 1.43 and 3.54 N, respectively. The mean and standard deviation gripping force values of the experienced surgeons were significantly lower than those of the novice surgeons (P = 0.015 and P = 0.011, respectively).
Conclusions
This study indicated that experienced surgeons generate weaker but more stable gripping force than novice surgeons during laparoscopic procedures.






Similar content being viewed by others


References
Uemura M, Tomikawa M, Kumashiro R, Miao T, Souzaki R, Ieiri S, Ohuchida K, Lefor AT, Hashizume M (2014) Analysis of hand motion differentiates expert and novice surgeons. J Surg Res 188:8–13. doi:10.1016/j.jss.2013.12.009
Oropesa I, Sánchez-González P, Chmarra MK, Lamata P, Fernández Á, Sánchez-Margallo JA, Jansen FW, Dankelman J, Sánchez-Margallo FM, Gómez EJ (2013) EVA: laparoscopic instrument tracking based on endoscopic video analysis for psychomotor skills assessment. Surg Endosc Other Interv Tech 27:1029–1039. doi:10.1007/s00464-012-2513-z
Yamanaka H, Makiyama K, Osaka K, Nagasaka M, Ogata M, Yamada T, Kubota Y (2015) Measurement of the physical properties during laparoscopic surgery performed on pigs by using forceps with pressure sensors. Advances in Urology. doi:10.1155/2015/495308
Sánchez-Margallo JA, Sánchez-Margallo FM, Oropesa I, Gómez EJ (2014) Systems and technologies for objective evaluation of technical skills in laparoscopic surgery. Minim Invasive Ther Allied Technol 23:40–51. doi:10.3109/13645706.2013.827122
Hofstad EF, Våpenstad C, Chmarra MK, Langø T, Kuhry E, Mårvik R (2013) A study of psychomotor skills in minimally invasive surgery: what differentiates expert and nonexpert performance. Surg Endosc Other Interv Tech 27:854–863. doi:10.1007/s00464-012-2524-9
Pagador JB, Sánchez-Margallo FM, Sánchez-Peralta LF, Sánchez-Margallo JA, Moyano-Cuevas JL, Enciso-Sanz S, Usón-Gargallo J, Moreno J (2012) Decomposition and analysis of laparoscopic suturing task using tool-motion analysis (TMA): improving the objective assessment. Int J Comput Assist Radiol Surg 7:305–313. doi:10.1007/s11548-011-0650-9
Trudeau MO, Nasr A, Carrillo B, Gerstle JT, Azzie G (2014) Construct validity and possible educational role for motion analysis in a laparoscopic trainer. Surg Endosc Other Interv Tech 28:252. doi:10.1007/s00464-014-3474-1
Sánchez-Margallo JA, Sánchez-Margallo FM, Pagador JB, Gómez EJ, Sánchez-González P, Usón J, Moreno J (2011) Video-based assistance system for training in minimally invasive surgery. Minim Invasive Ther Allied Technol 20:197–205. doi:10.3109/13645706.2010.534243
Bouarfa L, Akman O, Schneider A, Jonker PP, Dankelman J (2012) In-vivo real-time tracking of surgical instruments in endoscopic video. Minim Invasive Ther Allied Technol 21:129–134. doi:10.3109/13645706.2011.580764
Tonet O, Thoranaghatte RU, Megali G, Dario P (2007) Tracking endoscopic instruments without a localizer: a shape-analysis-based approach. Comput Aided Surg 12:35–42. doi:10.3109/10929080701210782
Escamirosa FP, Flores RMO, García IO, Vidal CRZ, Martínez AM (2014) Face, content, and construct validity of the EndoViS training system for objective assessment of psychomotor skills of laparoscopic surgeons. Surg Endosc 29(11):3392–3403. doi:10.1007/s00464-014-4032-6
Uemura M, Jannin P, Yamashita M, Tomikawa M, Akahoshi T, Obata S, Souzaki R, Ieiri S, Hashizume M (2015) Procedural surgical skill assessment in laparoscopic training environments. Int J Comput Assist Radiol Surg. doi:10.1007/s11548-015-1274-2
Smith MH, Flanagan CL, Kemppainen JM, Sack JA, Chung H, Das S, Hollister SJ, Feinberg SE (2006) Computed tomography-based tissue-engineered scaffolds in craniomaxillofacial surgery. Int J Med Robot 2:207–216. doi:10.1002/rcs
Nasr A, Carrillo B, Gerstle JT, Azzie G (2014) Motion analysis in the pediatric laparoscopic surgery (PLS) simulator: validation and potential use in teaching and assessing surgical skills. J Pediatr Surg 49:791–794. doi:10.1016/j.jpedsurg.2014.02.063
Hwang H, Lim J, Kinnaird C, Nagy AG, Panton ONM, Hodgson AJ, Qayumi KA (2006) Correlating motor performance with surgical error in laparoscopic cholecystectomy. Surg Endosc Other Interv Tech 20:651–655. doi:10.1007/s00464-005-0370-8
Yoshida K, Kinoshita H, Kuroda Y, Oshiro O, Matsuda T (2013) Analysis of laparoscopic dissection skill by instrument tip force measurement. Surg Endosc 27:2193–2200. doi:10.1007/s00464-012-2739-9
Hanna GB, Drew T, Arnold G, Fakhry M, Cuschieri A (2008) Development of force measurement system for clinical use in minimal access surgery. Surg Endosc 22:467–471. doi:10.1007/s00464-007-9489-0
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Disclosures
Azumi Araki, Kazuhide Makiyama, Hiroyuki Yamanaka, Daiki Ueno, Kimito Osaka, Manabu Nagasaka, Takahiro Yamada, Masahiro Yao have no conflicts of interest or financial ties to disclose.
Rights and permissions
About this article

Cite this article
Araki, A., Makiyama, K., Yamanaka, H. et al. Comparison of the performance of experienced and novice surgeons: measurement of gripping force during laparoscopic surgery performed on pigs using forceps with pressure sensors. Surg Endosc 31, 1999–2005 (2017). https://doi.org/10.1007/s00464-016-5153-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-016-5153-x