
Abstract
Introduction
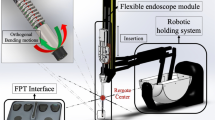
The flexible endoscope is increasingly being considered as a surgical tool to enable innovative natural orifice or flexible access techniques. These experiences have exposed unique advantages but also significant challenges. Major current technical drawbacks in this setting relate to uncontrolled flexibility, inaccurate sustained target localization, unreliable navigation and overall platform instability. In striving to address existing technical limitations, this paper introduces a novel flexible hyper-redundant surgical robot and evaluates its clinical potential using a focused clinical application.
Method
To assess utility of the device within tight confines of the human pelvis or peritoneal cavity, detailed laboratory workspace analysis experiments were undertaken using a computer-simulated model that incorporated anatomical data obtained via pelvic magnetic resonance images of eight women. Ten participants executed ninety usability and reliability trials on an ex vivo simulator, before the robot was repeatedly trialled in an in vivo porcine model.
Results
The robot demonstrated capability of targeting >90 % of the anatomic region of interest. All 90 user trials were successfully performed without interruption or malfunction. Significant improvements in performance, time and motion were observed between first and last sets of trials (p = 0.001). In vivo feasibility testing affirmed robustness of the device when deployed within the physiological demands of a live scale appropriate model.
Conclusion
Technologically advanced flexible operative platforms are needed to fulfil aspirations for an introductory era of flexible access surgery. This prototype is proposed as a potential future platform for robot-assisted flexible endoscopic surgery. Encouraging pre-clinical feasibility results are demonstrated for diagnostic and therapeutic applications within the pelvis.






Similar content being viewed by others


References
Gero D, Lukovich P, Hulesch B, Palhazy T, Kecskedi B, Kupcsulik P (2010) Inpatients and Specialists’ Opinions about Natural Orifice Translumenal Endoscopic Surgery. Surg Technol Int 19:79–84
Meining A, Kahler G, von Delius S, Buess G, Schneider A, Hochberger J et al (2009) [Natural orifices transluminal endoscopic surgery (NOTES) in Germany: summary of the working group reports of the “D-NOTES meeting 2009”]. Endoskopisches Operieren uber naturliche Korperoffnungen (NOTES) in Deutschland: Zusammenfassung der Arbeitsgruppensitzungen der “D-NOTES 2009”. Z Gastroenterol 47(11):1160–1167
Rattner DW, Hawes R, Schwaitzberg S, Kochman M, Swanstrom L (2011) The Second SAGES/ASGE White Paper on natural orifice transluminal endoscopic surgery: 5 years of progress. Surg Endosc 25(8):2441–2448
Clark J, Orihuela-Espina F, Sodergren M, James D, Karimyan V, Teare J et al (2013) A quantitative scale to define the quality of endoscopic torque control during Natural orifice translumenal endoscopic surgery. Minim Invasive Ther Allied Technol 22(1):17–25
Leroy J, Barry BD, Melani A, Mutter D, Marescaux J (2013) No-scar transanal total mesorectal excision: the last step to pure NOTES for colorectal surgery. JAMA surgery. 148(3):226–230 discussion 31. Epub 2013/05/18
Kennedy RH, Cahill RA, Sibbons P, Fraser C (2011) The, “FLEX” procedure: a new technique for full-thickness laparo-endoscopic excision in the colon. Endoscopy. 43(3):223–229 Epub 2011/03/03
Link RE, Bhayani SB, Allaf ME, Varkarakis I, Inagaki T, Rogers C et al (2005) Exploring the learning curve, pathological outcomes and perioperative morbidity of laparoscopic partial nephrectomy performed for renal mass. J Urol 173(5):1690–1694
Ahlering TE, Skarecky D, Lee D, Clayman RV (2003) Successful transfer of open surgical skills to a laparoscopic environment using a robotic interface: initial experience with laparoscopic radical prostatectomy. J Urol 170(5):1738–1741
Rentschler ME, Dumpert J, Platt SR, Farritor SM, Oleynikov D (2007) Natural orifice surgery with an endoluminal mobile robot. Surg Endosc 21(7):1212–1215
Best SL, Bergs R, Gedeon M, Paramo J, Fernandez R, Cadeddu JA et al (2011) Maximizing coupling strength of magnetically anchored surgical instruments: how thick can we go? Surg Endosc 25(1):153–159
Phee SJ, Low SC, Sun ZL, Ho KY, Huang WM, Thant ZM (2008) Robotic system for no-scar gastrointestinal surgery. Int J Med Robot. 4(1):15–22
Shang J, Noonan D, Payne C, Clark J, Sodergren M, Darzi A, et al. (2010) An Articulated Universal Joint Based Flexible Access Robot for Minimally Invasive Surgery. In Robotics and Automation (ICRA), 2011 IEEE International Conference on (pp. 1147-1152). IEEE
Noonan DP, Payne CJ, Shang J, Sauvage V, Newton R, Elson D et al (2010) Force adaptive multi-spectral imaging with an articulated robotic endoscope. Med Image Comput Comput Assist Interv 13(Pt 3):245–252
Binenbaum SJ, Teixeira JA, Forrester GJ, Harvey EJ, Afthinos J, Kim GJ et al (2009) Single-incision laparoscopic cholecystectomy using a flexible endoscope. Arch Surg 144(8):734–738
Clark J, Leff, Sodergren M, Newton R, Noonan D, Goldin R et al (2012) Single-incision transumbilical levels 1 and 2 axillary lymph node dissection using a flexible endoscope in human cadaveric models. Surg Endosc 27(2):478–486
Marescaux J, Dallemagne B, Perretta S, Wattiez A, Mutter D, Coumaros D (2007) Surgery without scars: report of transluminal cholecystectomy in a human being. Arch Surg 142(9):823–826; discussion 6–7
Guillou PJ, Quirke P, Thorpe H, Walker J, Jayne DG, Smith AM et al (2005) Short-term endpoints of conventional versus laparoscopic-assisted surgery in patients with colorectal cancer (MRC CLASICC trial): multicentre, randomised controlled trial. Lancet 365(9472):1718–1726
Kwak JM, Kim SH (2011) Current status of robotic colorectal surgery. J. Robotic Surg. 5:65–72
Clark J, Sodergren MH, Purkayastha S, Mayer EK, James D, Athanasiou T et al (2011) The role of robotic assisted laparoscopy for oesophagogastric oncological resection; an appraisal of the literature. Dis Esophagus 24(4):240–250
Clark J, Shetty K, Sodergren MH, James DRC, Purkayastha S, Athanasiou T et al (2011) Robotic-assisted Total Mesorectal Excision; should it be the technique of choice in the management of rectal cancer? J Robotic Surg 6(2):99–114
Spinoglio G, Summa M, Priora F, Quarati R, Testa S (2008) Robotic colorectal surgery: first 50 cases experience. Dis Colon Rectum 51(11):1627–1632
Kwok K, Mylonas GP, Sun L, Lerotic M, Clark J, Athanasiou T, et al. (2009) Dynamic Active Constraints for Hyper-Redundant Flexible Robot. Medical Image Computing Computer Assisted Intervention. Presentation at MICCAI 2009 Conference:Awaiting final publication details
Acknowledgments
This work was funded by a Wellcome Trust Strategic Translation Award (083689). We gratefully acknowledge the assistance of Northwick Park Institute for Medical Research (NPIMR) for trial arrangement.
Diaclosures
James Clark, David P Noonan, Valentina Vitiello, Mikael H Sodergren, Christopher J Payne, Thomas P Cundy, and Ara Darzi have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Clark, J., Noonan, D.P., Vitiello, V. et al. A novel flexible hyper-redundant surgical robot: prototype evaluation using a single incision flexible access pelvic application as a clinical exemplar. Surg Endosc 29, 658–667 (2015). https://doi.org/10.1007/s00464-014-3716-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-014-3716-2