
Abstract
Background and purpose
Laparoscopes used in laparoscopic surgery are manipulated by human means, passive systems or robotic systems. All three methods accumulate downtime when the laparoscope is cleaned and the optical perspective is adjusted. This work proposes a new navigation system that autonomously handles the laparoscope, with a view to reducing latency, and that allows real-time adjustment of the visual perspective.
Methods
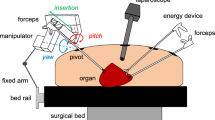
The system designed is an intuitive mechatronic system with three degrees of freedom and a single active articulation. The system uses the point of insertion as the invariant point for navigation and has a work space that closely resembles an inverted cone.
Results
The mechatronic system has been tested in a physical trainer, cutting and suturing chicken parts, as well as in laparoscopic ovariohysterectomies in dogs and pediatric surgeries. In all the procedures, surgeons were able to auto-navigate and there was no visual tremor while using the system. Surgeons performed visual approaches in real time and had both hands free to carry out the procedure.
Conclusion
This new mechatronic system allows surgeons to perform solo surgery. Cleaning and positioning downtime are reduced, since it is the surgeon him/herself who handles the optics and selects the best visual perspective for the surgery.



Similar content being viewed by others


References
Schurr MO, Arezzo A, Neisius B, Rininsland H, Hilzinger HU, Dorn J, Roth K, Buess GF (1999) Trocar and instrument positioning system TISKA. An assist device for endoscopic solo surgery. Surg Endosc 13:528–531
Arezzo A, Schurr MO, Braun A, Buess GF (2005) Experimental assessment of a new mechanical endoscopic solo surgery system: endofreeze. Surg Endosc 19:581–588
Jaspers JE, Den Boer KT, Sjoerdsma W, Bruijn M, Grimbergen CA (2000) Design and feasibility of PASSIST, a passive instrument positioner. J Laparoendosc Adv Surg Tech A 10(6):331–335
Sackier JM, Wang Y (1994) Robotically assisted laparoscopic surgery from concept to development. Surg Endosc 8:63–66
Dagan J, Bat L (1982) Endoassist, a mechanical device to support an endoscope. Gastrointest Endosc 28(2):97–98
Buess GF, Arezzo A, Schurr MO, Ulmer F, de Pescador H, Gumb L, Testa T, Nobman C (2000) A new remote-controlled endoscope positioning system for endoscopic solo surgery. The FIPS endoarm. Surg Endosc 14(4):395–399
Minor A, Mosso JL, Domínguez A, Martínez RC, Muñoz R, Lara V (2002) Robot para cirugía laparoscópica. Revista Mexicana Ingeniería Biomédica 23(1):27–32
Minor Martínez A, Muñoz Guerrero R, Nieto J, Ordorica Flores R (2005) Postural mechatronic assistant for laparoscopic training. Minimally Invasive Ther Allied Technol 14(6):357–359
Arezzo A, Ulmer F, Weiss O, Schurr MO, Hamad M, Buess GF (2000) Experimental trial on solo surgery for minimally invasive therapy. Surg Endosc Ultrasound Intervent Tech 14:955–959
Acknowledgements
This paper was supported in part by the (National Council for Science and Technology), Mexico.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Minor Martinez, A., Villalobos Gomez, J., Ordorica Flores, R. et al. Postural mechatronic assistant for laparoscopic solo surgery (PMASS). Surg Endosc 23, 663–667 (2009). https://doi.org/10.1007/s00464-008-9982-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-008-9982-0