
Abstract
Background
In minimally invasive surgery, force feedback information on tissue manipulation is altered by friction between the instrument and the sealing mechanism of the trocar. It is unknown how the different sealing mechanisms of currently available trocars influence the friction forces. The current study investigated the dynamic changes in friction for various trocars at different instrument velocities.
Methods
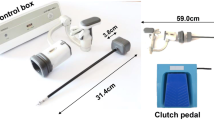
The friction characteristics for six common types of trocars were determined. A force sensor was attached to the shaft of a standard 5-mm disposable grasper to measure the forces required to move it through the trocars. Movement velocity and direction of the shaft were controlled by a servomotor. In addition, whether moistening the shaft reduced friction was tested.
Results
The friction depended on the type of trocar, the movement velocity, and the movement direction, and varied between 0.25 and 3.0 N. Specifically, trocars with narrow sealing caps (i.e., high normal force onto the shaft) and trocars with thick sealing caps (i.e., large contact area) generate a high amount of friction. Moistening the shaft reduced friction 15% to 45%. For most trocars, large fluctuations in forces occur when the movement starts or when the direction reverses. The magnitude of these fluctuations varied between 0.2 and 2.5 N.
Conclusions
For some trocars, friction can be as great as the forces associated with instrument–tissue interaction. At movement reversals, friction fluctuates due to deformations of the rubber and silicon parts of the sealing mechanism. Such high variance can deteriorate surgical performance during high precision tasks (e.g., tissue manipulation) that typically involve many changes in movement direction. Comparisons of the investigated trocars indicate that the friction magnitude and variance can be reduced easily by changing the properties of the sealing cap or by lubricating the instruments.





Similar content being viewed by others

References
De Visser H, Heijnsdijk EA, Herder JL, Pistecky PV (2002) Forces and displacements in colon surgery. Surg Endosc 16: 1426–1430
Den Boer KT, Herder JL, Sjoerdsma W, Meijer DW, Gouma DJ, Stassen HG (1999) Sensitivity of laparoscopic dissectors: what can you feel? Surg Endosc 13: 869–873
Dubois P, Thommen Q, Jambon AC (2002) In vivo measurement of surgical gestures. IEEE Trans Biomed Eng 49: 49–54
Elmer FJ (1997) Nonlinear dynamics of dry friction. J Phys A Math Gen 30: 6057–6063
Hager-Ross C, Johansson RS (1996) Nondigital afferent input in reactive control of fingertip forces during precision grip. Exp Brain Res 110: 131–141
Heijnsdijk EA, van der Voort M, de Visser H, Dankelman J, Gouma DJ (2003) Inter- and intraindividual variabilities of perforation forces of human and pig bowel tissue. Surg Endosc 17: 1923–1926
Johansson RS, Westling G (1987) Signals in tactile afferents from the fingers eliciting adaptive motor responses during precision grip. Exp Brain Res 66: 141–154
Lamata P, Gomez EJ, Sanchez-Margallo FM, Lamata F, Antolin M, Rodriguez S, Oltra A, Uson J (2006) Study of laparoscopic forces perception for defining simulation fidelity. Stud Health Technol Inform 119: 288–292
Persson BNJ (1998) Sliding friction physical principles and applications. Springer, Berlin
Picod G, Jambon AC, Dubois P, Vinatier D (2003) Measurement of the friction in the sheath of the trocars used in laparoscopy. ITBM-RBM Revue Européenne de Technologie Biomédicale 24: 217–222
Picod G, Jambon AC, Vinatier D, Dubois P (2005) What can the operator actually feel when performing a laparoscopy? Surg Endosc 19: 95–100
Acknowledgments
We thank Karl Storz Endoscopie Nederland BV, Ethicon Endo Surgery (Johnson & Johnson Medical BV), and Aesculap (B. Braun Medical BV) for providing the trocars used in this study.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
van den Dobbelsteen, J.J., Schooleman, A. & Dankelman, J. Friction dynamics of trocars. Surg Endosc 21, 1338–1343 (2007). https://doi.org/10.1007/s00464-006-9105-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-006-9105-8