
Abstract
Background
The assistance received by the surgeon from support personnel during operative laparoscopy is extremely important. This includes retraction of instruments and endoscope positioning. However, human assistance is costly and often does not provide satisfaction for the surgeon. The aim of this study was to develop a mechanical arm capable of allowing easy handling and holding of laparoscopic instruments under the surgeon’s control.
Methods
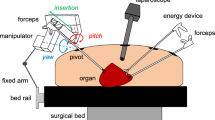
We designed a system, named Endofreeze, based on a particular kinematical construction that maintains an invariant point of constraint motion just above the trocar puncture site through the abdominal wall. The goal was to develop this way a highly intuitive mechanical holding system for laparoscopic instruments, with sufficient precision of action, activated by a single hand movement. We tested a couple of prototypes with different holding arms while performing cholecystectomy in phantom models with swine inserts and compared the results obtained in similar conditions using different holding and positioning systems.
Results
The system allows transparent and intuitive operation, and its setup is easy and quick. It may be adapted either as an instrument retractor or as an optic positioning device. Compared to different systems available or prototypes previously tested, such as AESOP 2000, ENDOASSIST, FIPS Endoarm, TISKA Endoarm, and the Martin Arm, in similar conditions, it was more intuitive, allowing shorter time for completion of surgery.
Conclusion
Endofreeze is a new intuitive mechanical positioning system for endoscopic solo surgery. In phantom models, it demonstrated a shorter time requirement for completion of surgery when compared to other systems available. In our opinion, it represents a valid compromise between human and robotic control for conventional laparoscopic instruments.













Similar content being viewed by others

References
A Arezzo F Ulmer O Weiss MO Schurr M Hamad GF Buess (2000) ArticleTitleExperimental trial on solo surgery for minimally invasive therapy: comparison of different systems in a phantom model Surgl Endosc 14 955–959 Occurrence Handle10.1007/s004640000106 Occurrence Handle1:STN:280:DC%2BD3M7gvFOqtw%3D%3D
AL Benabid S Lavallee D Hoffmann P Cinquin J Demongeot F Danel (1992) ArticleTitlePotential use of robots in endoscopic neurosurgery Acta Neurochir Suppl 54 93–97 Occurrence Handle1:STN:280:By2B1c%2Fks1E%3D
GF Buess A Arezzo MO Schurr F Ulmer H Fischer L Gumb T Testa C Nobman (2000) ArticleTitleA new remote-controlled endoscope positioning system for endoscopic solo surgery Surg Endosc 14 395–399 Occurrence Handle10.1007/s004640020066 Occurrence Handle1:STN:280:DC%2BD3c3ltlymtQ%3D%3D Occurrence Handle10790562
BL Davies RD Hibberd MJ Coptcoat JE Wickham (1989) ArticleTitleA surgeon robot prostatectomy-a laboratory evaluation J Med Eng Technol 13 273–277 Occurrence Handle1:STN:280:By%2BC3szosVU%3D Occurrence Handle2614807
PA Finlay MH Ornstein (1995) ArticleTitleControlling the movement of a surgical laparoscope IEEE Eng Med Biol 14 289–291 Occurrence Handle10.1109/51.391775
SA Glantz (1996) Primer of Biostatistics, Version 4.0 McGraw-Hill New York
PJ Kelly BA Kail S Goerss F Earnest (1986) ArticleTitleComputer assisted stereotactic laser resection of intra-axial brain neoplasm J Neurosurg 64 427–439 Occurrence Handle1:STN:280:BimC2czgtFA%3D Occurrence Handle3005528
H Koyama T Uchida H Funakubo K Takakura H Fankhauser (1990) ArticleTitleDevelopment of a new microsurgical robot for stereotactic neurosurgery Stereotact Funct Neurosurg 54-55 462–467 Occurrence Handle1:STN:280:By6C1c%2Fltlc%3D Occurrence Handle2080368
FA Matsen JL Garbini JA Sidles B Pratt D Baumgarten R Kaiura (1993) ArticleTitleRobotic assistance in orthopaedic surgery. A proof of principle using distal femoral arthroplasty Clin Orthop 296 178–186 Occurrence Handle8222422
J Mueglitz Kunad P Dautzenberg B Neisius R Trapp (1993) ArticleTitleKinematic problems of manipulators in minimally invasive surgery Endosc Surg Allied Technol 1 160–164 Occurrence Handle1:STN:280:ByuA3s3mtlA%3D Occurrence Handle8055317
JM Sackier Y Wang (1994) ArticleTitleRobotically assisted laparoscopic surgery. From concept to development Surg Endosc 8 63–66 Occurrence Handle1:STN:280:ByuB3cvptFA%3D Occurrence Handle8153867
MO Schurr A Arezzo B Neisius HH Rininsland HU Hilzinger J Dorn K Roth GF Buess (1999) ArticleTitleTrocar and instrument positioning system TISKA: an assist device for endoscopic solo-surgery Surg Endosc 13 528–531 Occurrence Handle10.1007/s004649901029 Occurrence Handle1:STN:280:DyaK1M3ksVOltg%3D%3D Occurrence Handle10227959
KS Taylor (1993) ArticleTitleRobodoc: study tests robot’s use in hip surgery Hospitals 67 46 Occurrence Handle1:STN:280:ByyB3sbhsFA%3D
LW Traverse KP Koo K Hargrave et al. (1997) ArticleTitleStandardizing laparoscopic procedure time and determining the effect of patient age/gender or absence of surgical residents during operations Surg Endosc 11 226–229 Occurrence Handle10.1007/s004649900331 Occurrence Handle9079597
Acknowledgments
We thank Dr. Theodor Lutze and Dr. Dieter Weisshaupt of Aesculap AG & CO. KG (Tuttlingen, Germany) for their support in the development of the Endofreeze system.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Arezzo, A., Schurr, M.O., Braun, A. et al. Experimental assessment of a new mechanical endoscopic solosurgery system: Endofreeze. Surg Endosc 19, 581–588 (2005). https://doi.org/10.1007/s00464-003-9132-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-003-9132-7