
Abstract
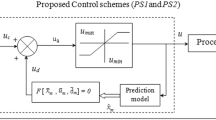
Internal Model Control (IMC) and Model Predictive Control (MPC), the two most important members of model based controllers, are favourable alternatives for control of nonlinear processes. However, the performance of these controllers deteriorates drastically in the presence of substantial process-model mismatch. Hu and Rangaiah (1998) proposed feedback augmentation for nonlinear IMC (hence named Augmented IMC, AuIMC) for improving control in the presence of modelling errors, and demonstrated its success on a neutralization process. In the present study, IMC, MPC and AuIMC strategies are tested in a more difficult case of multi-input multi-output (MIMO) operation of a highly nonlinear continuous fermenter. A new control configuration is introduced as the conventional configuration is not applicable. Simulation results for different modelling errors show that IMC is better than MPC for fermenter control. The advantage of augmentation as in AuIMC manifests in the significantly improved regulatory control of the fermenter.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received: 12 January 1998
Rights and permissions
About this article
Cite this article
Saha, P., Hu, Q. & Rangaiah, G. Multi-input multi-output control of a continuous fermenter using nonlinear model based controllers. Bioprocess Engineering 21, 533–542 (1999). https://doi.org/10.1007/s004490050713
Issue Date:
DOI: https://doi.org/10.1007/s004490050713