
Abstract.
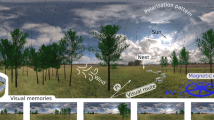
Honeybees and social wasps departing from a novel food source perform stereotype flight manoeuvres, termed the turn-back-and-look behaviour (TBL). Based on results of behavioural studies, it is proposed that the image motion generated by the TBL provides the insect with information about the three-dimensional structure of the goal's surroundings, thus enabling it to select reliable landmarks that will guide it to the goal upon return. The colour, shape, and size of landmarks, on the other hand, are learned mainly during arrival at the food source. However, when bees are prevented from learning these cues on arrival, they learn them during the TBL, despite the fact that this performance does not require the use of image motion. A recently developed model shows that landmark learning can indeed be accomplished during the TBL by exploiting cues others than image motion. A mobile robot equipped with the appropriate software selects, during the TBL, reliable marks and returns to the site of departure from different locations by accomplishing image matching along a two-dimensional vector field.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received: 7 May 1999 / Accepted in revised form: 20 March 2000
Rights and permissions
About this article
Cite this article
Lehrer, M., Bianco, G. The turn-back-and-look behaviour: bee versus robot. Biol Cybern 83, 211–229 (2000). https://doi.org/10.1007/s004220000165
Issue Date:
DOI: https://doi.org/10.1007/s004220000165