
Abstract
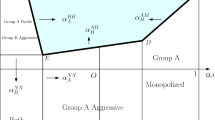
Competition between groups often involves prizes that have both a public and a private component. The exact nature of the prize not only affects the strategic choice of the sharing rules determining its allocation but also gives rise to an interesting phenomenon not observed when the prize is either purely public or purely private. Indeed, we show that in the two-groups contest, for most degrees of privateness of the prize, the large group uses its sharing rule as a mean to exclude the small group from the competition, a situation called monopolization. Conversely, there is a degree of relative privateness above which the small group, besides being active, even outperforms the large group in terms of winning probabilities, giving rise to the celebrated group size paradox.

Similar content being viewed by others

Notes
Starting with Nitzan (1991), the literature has considered both exogenous and endogenous sharing rules, while it has assumed that the choice of such rules may occur under either public or private information. For a recent survey on prize-sharing rules in collective rent seeking, see Flamand and Troumpounis (2015).
These transfers are analogous to the ones proposed in individual contests by Hillman and Riley (1989). Recent literature has considered cost-sharing in collective contests for purely public prizes, which can also be interpreted as within-group transfer schemes (Nitzan and Ueda 2014b; Vazquez 2014). Nitzan and Ueda (2014b) provide several examples of situations involving transfers among members of a group, in contexts such as labor unions, ethnic conflicts, or academic institutions.
While the two previous works provide further results on the influence of a convex cost of effort on the elimination of the GSP, the introduction of a strategic choice of sharing rules obliges us to restrict ourselves to the linear cost case. A convex cost of effort penalizes higher levels of individual effort, hence it works against the occurrence of the GSP. Corchón (2007) provides an intuition for the latter: “Intuitively, it is clear that Olson’s conjecture cannot hold if costs rise very quickly with effort: for instance if costs are zero up to a point, say \({\bar{G}}\) where they jump to infinity, all agents will make effort \({\bar{G}}\) and smaller groups will exert less effort than large ones.” Our conjecture is then that monopolization should also hold with convex costs, while the GSP should be less likely.
In fact, in the literature on collective rent seeking and sharing rules the assumption of perfect information as in this paper is the usual one. To the best of our knowledge, the only papers analyzing the case of private information are Baik and Lee (2007, 2012), Nitzan and Ueda (2011), Baik (2014) and Nitzan and Ueda (2014b). Monopolization never arises in that context, even when considering intermediate degrees of privateness of the contested prize.
Relaxing the property of non-rivalry by assuming that the public part of the prize is congestionable does not qualitatively alter our results (see footnotes 16 and 17).
We abstract from the possibility of intra-group heterogeneity regarding lobbying effectivity, which can be reflected in different valuations of the prize by the members. One can ask whether a group whose members have highly unequal interests in the collective action will be more or less active. The literature has provided contrasted answers to the latter question, due to the difference in the assumed form of the effort cost function [see the discussion in Nitzan and Ueda (2014a) and the references they cite]. Assuming very weak and plausible restrictions on the form of the effort cost functions, Nitzan and Ueda (2014a) show that if a group competes for a prize with sufficiently many rivals or with a very superior rival, unequal stakes among the members can enhance its performance.
Observe that \(1/n_i\) substitutes \(e_{ki}/E_i\) in (1) to avoid an indeterminacy for \(E_i=0\).
Pecorino and Temimi (2008) modify the model of Esteban and Ray (2001) to a standard public good setting, and show that their results are robust to the presence of small fixed costs of participation in the case of a pure public good, but not in the case of a fully rival good. Furthermore, when the degree of rivalry is sufficiently high, the introduction of small fixed costs of participation implies that collective action must break down in large groups.
This case is also equivalent to the collective contest with pure public goods studied by Baik (2008).
Notice that although Proposition 2 considers the cases of \(p=0\) and \(p=(0,1]\) separately, there is no discontinuity between the two cases. One can easily verify that independently of the occurrence of the GSP, the winning probability of both groups converges to one half as p approaches zero. The reason we chose to separate between the two cases is that when the prize is a pure public good (i.e., \(p=0\)), expression (2) is not necessary since the sharing rules do not apply.
As the aggregate welfare of group i only depends on aggregate effort, and as we know from Proposition 1 that in equilibrium aggregate effort is unique for any \(\alpha _i\), it follows that the sharing rule \(\alpha _i\) that maximizes the expected utility of the representative individual in a within-group symmetric equilibrium also maximizes \(\sum _{k\in i} EU_{ki}\).
The results for \(p=0\) are not analyzed here. They can be obtained from Proposition 1.
On pure public goods, see also Riaz et al. (1995), Ursprung (1990) and Katz et al. (1990), among others. They have shown that with a pure public good, a group with larger membership attains a winning probability larger than or equal to that of a smaller group. Neither monopolization nor the GSP arise in such cases.
This discontinuity might strike some readers as puzzling as it cannot arise in a continuous game, by upper hemicontinuity property of the equilibrium correspondence. However, it is worth emphasizing that two different games are played for \(p=0\) or \(p>0\). Indeed, for \(p>0\) we are solving a two-stage game where sharing rules are chosen prior to the effort stage (with an action space \({\mathbb {R}}_+^{2+n_A+n_B}\)). In contrast, for \(p=0\) sharing rules do not apply so that one can focus only on the single-stage effort game (with action space \({\mathbb {R}}_+^{n_A+n_B}\)). This difference in the definition of the game and the absence of the strategic choice of sharing rules in the case of a pure public good allow for the discontinuity.
Notice that the numerical value of \(p_1\) is large and very close to one as the size of the groups increases, and/or when there is a large difference between group sizes. For instance, if \(n_A=15\) and \(n_B=7\) then \(p_1=0.98\). However, this critical value of the degree of privateness can be rescaled by assuming that the public good is congestible. This could be captured by a parameter \(c\in [0,1)\) such that the utility attributed to the public good by any member of group i is \((1-p)V/n_i^c\). In that case the critical value \(p_1\) is given by \(p_1^c=\frac{n_B \left[ n_A^c (1 + n_B)-n_A n_B^c\right] }{n_A^c n_B (1 + n_B) - n_B^c (n_A^c + n_A n_B)}\), which for the previous example rescales \(p_1\) to \(p_1^c=0.76\) for \(c=0.6\). In order to avoid unnecessary complications in the main text, we consider the case of \(c=0\).
The numerical value of \(p_{GSP}\) is large and very close to one as the size of the groups increases, and/or when there is a large difference between group sizes. For instance, if \(n_A=15\) and \(n_B=7\) then \(p_{GSP}=0.99\). Again, this value can be rescaled if we assume that the public good is congestible. In that case \(p_{GSP}^c=\frac{n_A n_B [n_B^c+2 n_A n_B^c-n_A^c (1 + 2 n_B)]}{n_B^c[n_A^c (n_A - n_B) + n_A (1 + 2 n_A) n_B]-n_A^{1+c} n_B (1 + 2 n_B)}\), which for the previous example yields \(p_{GSP}^c=0.95\) for \(c=0.6\).
To avoid introducing more notation, we do not define formally the thresholds \(p_2\) and \(p_3\) presented in the interpretation of our results. They can be easily calculated and one can show that \(p_1<p_2<p_3<p_{GSP}\).
The equilibrium (restricted) sharing rules for the case of n groups are provided by Ueda (2002).
The analytical expression of the threshold \(\mathring{p}\) can be found in the Appendix.
Two more possible equilibria characterized by the equilibrium sharing rules presented in Propositions 3 and 5 are the ones such that (i) only the large group decides to restrict the choice of its sharing rule (if p is large enough) and (ii) only the small group decides to restrict the choice of its sharing rule (if \(p<p_1\)).
References
Baik KH (1993) Effort levels in contests: the public-good prize case. Econ Lett 41:363–367
Baik KH (1994) Winner-help-loser group formation in rent-seeking contests. Econ Polit 6:147–162
Baik KH (2008) Contests with group-specific public-good prizes. Soc Choice Welf 30:103–117
Baik KH (2014) Endogenous group formation in contests: unobservable sharing rules. Working Paper
Baik KH, Lee S (1997) Collective rent seeking with endogenous group sizes. Eur J Polit Econ 13:121–130
Baik KH, Lee S (2001) Strategic groups and rent dissipation. Econ Inq 39:672–684
Baik KH, Lee S (2007) Collective rent seeking when sharing rules are private information. Eur J Polit Econ 23:768–776
Baik KH, Lee D (2012) Do rent-seeking groups announce their sharing rules? Econ Inq 50:348–363
Baik KH, Shogren JF (1995) Competitive-share group formation in rent-seeking contests. Public Choice 83:113–126
Corchón LC (2007) The theory of contests: a survey. Rev Econ Des 11:69–100
Davis DD, Reilly RJ (1999) Rent-seeking with non-identical sharing rules: an equilibrium rescued. Public Choice 100:31–38
Esteban J-M, Ray D (2001) Collective action and the group size paradox. Am Polit Sci Rev 95:663–672
Flamand S, Troumpounis O (2015) Prize-sharing rules in collective rent seeking. In: Congleton RD, Hillman AL (eds) Companion to the political economy of rent seeking. Edward Elgar Publishing, Cheltenham, pp 92–112
Gürtler O (2005) Rent seeking in sequential group contests. Bonn Economic Discussion Papers #47
Hillman AL, Riley JG (1989) Politically contestable rents and transfers. Econ Politics 1:17–39 [Reprinted in: Congleton RD, Hillman AL, Konrad KA (eds) (2008) Forty years of research on rent seeking 1—theory of rent seeking. Springer, Heidelberg, pp 185–208]
Katz E, Nitzan S, Rosenberg J (1990) Rent-seeking for pure public goods. Public Choice 65:49–60
Lee S (1995) Endogenous sharing rules in collective-group rent-seeking. Public Choice 85:31–44
Lee S, Kang JH (1998) Collective contests with externalities. Eur J Polit Econ 14:727–738
Nitzan S (1991) Collective rent dissipation. Econ J 101:1522–1534
Nitzan S, Ueda K (2011) Prize sharing in collective contests. Eur Econ Rev 55:678–687
Nitzan S, Ueda K (2014a) Intra-group heterogeneity in collective contests. Soc Choice Welf 43(1):219–238
Nitzan S, Ueda K (2014b) Cost sharing in collective contests. CESifo Working Paper Series
Noh SJ (1999) A general equilibrium model of two group conflict with endogenous intra-group sharing rules. Public Choice 98:251–267
Olson M (1965) The logic of collective action. Harvard University Press, Harvard
Pecorino P, Temimi A (2008) The group size paradox revisited. J Public Econ Theory 10:785–799
Riaz K, Shogren JF, Johnson SR (1995) A general model of rent seeking for public goods. Public Choice 82:243–259
Ueda K (2002) Oligopolization in collective rent-seeking. Soc Choice Welf 19:613–626
Ursprung HW (1990) Public goods, rent dissipation, and candidate competition. Econ Polit 2:115–132
Vazquez A (2014) Sharing the effort costs in collective contests. Available at SSRN. http://papers.ssrn.com/sol3/papers.cfm?abstract_id=2514716
Author information
Authors and Affiliations
Corresponding author
Additional information
We gratefully acknowledge the comments from Benoît Crutzen, Shmuel Nitzan, Kaoru Ueda as well as two anonymous referees and the editor. Any remaining errors are our own. Balart and Troumpounis thank the Spanish Ministry of Economy and Competitiveness for its financial support through Grant ECO2012-34581. Flamand acknowledges financial support by the Portuguese Ministry of Education and Science through the Foundation for Science and Technology (FCT).
Appendix
Appendix
Proof of Proposition 1
The proof relies on an extension of Ueda (2002). In order to facilitate comparison, let us transform \(\alpha _i=1-{\hat{\alpha }}_i\). The expected utility of individual \(k=1,\ldots ,n_i\) in group \(i=A,B\) is
By the Kuhn–Tucker Theorem, the necessary and sufficient conditions to characterize the unique within-team symmetric pure-strategy Nash equilibrium are the following: (i) \(e_{ki}= E_i/n_i\) for each member of group \(i=A, B\) and (ii)
Similarly to Ueda (2002) we can define:
We also define \(\hat{n}_i= \frac{1}{1- p(1-\frac{1}{n_i})}\), which is always positive and larger than one. Then the above necessary and sufficient conditions for the pure strategy Nash equilibrium can be written as
This expression is analogous to expression (2) in Ueda (2002, p. 616), which guarantees that Proposition 1 and Corollary 1 in Ueda (2002) hold in our case. Then, in our two-groups case, from Corollary 1(b), members of group i are inactive if and only if
Rewriting this condition in terms of \(\alpha _A\), \(\alpha _B\) yields \(\chi _i(\alpha _A,\alpha _B)\ge 0\) in Proposition 1. Further, it is immediate to see that \(\chi _i(\alpha _A,\alpha _B)\ge 0\) implies \(\chi _j(\alpha _A,\alpha _B)<0\). Solving the system of equations arising from the first-order conditions in the interior and corner solutions, we find the equilibrium effort levels \(\tilde{e}_i, \,\tilde{e}_{j}\) and \({\hat{e}}_i\) as presented in Proposition 1 and have therefore characterized the unique within-team symmetric equilibrium.
As Baik (2008) has shown, the possibility of asymmetric equilibria may arise when groups compete for a prize that is of a pure public good nature. We shall first argue that whenever the prize includes at least some private component (i.e., \(p> 0\)) or when the sharing rule is partly meritocratic (i.e., \(\alpha _i>0\)) there exist no within-group asymmetric equilibria (i.e., equilibria where members of group i exert different effort levels). In such case, therefore, the symmetric equilibrium we characterized is unique.
Given that individuals are identical, the derivative of the expected utility with respect to \(e_{ki}\) is identical for all members of group i, as it is given by
Thus, it follows that for any two members k and l of group i it cannot hold that \( e_{ki}\ne e_{li}\) if \( e_{ki}>0\) and \( e_{li}>0\). Further, we can also show the non-existence of asymmetric within-group equilibria where some of the group members are inactive. If \( e_{ki}=0\) for some members of group i and \( e_{li}=E_i / \tilde{n}_i>0\) for the \(\tilde{n}_i\) members exerting positive effort, the first order conditions require that \( \frac{\partial EU_{ki}}{\partial e_{ki}} ( e_{ki}=0)\le 0\) and \(\frac{\partial EU_{li}}{\partial e_{li}}=0\). One can easily verify that \(\frac{\partial EU_{ki}}{\partial e_{ki}} ( e_{ki}=0)>\frac{\partial EU_{li}}{\partial e_{li}}\) for any \(p>0\) and \(\alpha _i>0\) and hence reject the possibility of within-group asymmetric equilibria in such cases.
-
Case 1: \(p>0\) and \(\alpha _i>0\) for \(i=A,B\)
Since we have shown that for \(p>0\) and \(\alpha _i>0\) for \(i=A,B\) there can be no within-group asymmetric equilibria, we can conclude that the characterized within-group symmetric equilibrium is the unique equilibrium.
-
Case 2: \(p=0\) or \(p>0\) and \(\alpha _i=0\) for \(i=A,B\)
For \(p=0\) the two groups are competing for a pure public good, hence the equilibrium characterization arises directly from Baik (2008). For \(p>0\) and \(\alpha _i=0\) for \(i=A,B\), the egalitarian distribution of the private good makes the prize equivalent to a public good with different valuation for the members of different groups. In particular, the valuation of the prize for the members of group i is equal to \(V_i=(\frac{1}{n_i}+1-p)V\). By using these valuations for each group the characterization of the equilibrium also follows immediately from Baik (2008). Therefore, for \(p=0\) or \(p>0\) and \(\alpha _i=0\) for \(i=A,B\), we can follow Baik (2008) and conclude that there exist multiple within-group asymmetric equilibria, all of them characterized by the same level of aggregate effort as in the symmetric equilibrium, i.e., \(E_i=n_i {\hat{e}}_i\) (substituting the corresponding value for \(p=0\) or \(\alpha _i=0\) for \(i=A, B\)).
-
Case 3: \(p>0\), \(\alpha _i=0\) and \(\alpha _j>0\)
The previous extension of Ueda (2002) guarantees the existence of the within-group symmetric equilibrium. As \(\alpha _j>0\), we know that there exists no within-group j asymmetric equilibrium. Then, as \(\alpha _i=0\), Lemma 3 in Baik (2008) guarantees that given a within-group i symmetric equilibrium yielding aggregate effort \( Ei=n_i {\hat{e}}_i >0\), any alternative distribution of individual effort within group i also constitutes an equilibrium as long as it also leads to aggregate effort \(E_i=n_i {\hat{e}}_i\).
If \(\alpha _j\) is such that \(\chi _i(0,\alpha _j)\ge 0\), then group i is inactive and thus the equilibrium is unique and symmetric within the groups. If \(\alpha _j\) is such that \(\chi _i(0,\alpha _j)<0\), then both groups are active and there exist multiple within-group i asymmetric equilibria with \(E_i=n_i {\hat{e}}_i\) (with the value of \(\alpha _i=0\)). \(\square \)
Proof of Proposition 2
By definition the GSP takes place if and only if \(E_A<E_B\). Consider the equilibrium effort levels when both groups are active. Then \(\tilde{E}_A=n_A {\hat{e}}_A<\tilde{E}_B=n_B {\hat{e}}_B\) can be written as
where: \(A(\alpha _A,\alpha _B)= - [n_B (1 - p) + p] [n_A (1-p)+ p + (n_A-1) p \alpha _A] - ( n_B-1)[n_A (1-p) + p] p \alpha _B <0 \), \(B(\alpha _A,\alpha _B)= n_B (1-2\alpha _A) + n_A[2 n_B (\alpha _A - \alpha _B) + 2 \alpha _B-1]\) and \(C=[n_A (2 n_B (p-1) - p) - n_B p]^2 >0.\)
The above expression is equal to zero for \(p=0\), hence the GSP does not arise in that case. For other values of p we need to consider the sign of each expression. Since C is always positive and \(A(\alpha _A,\alpha _B)\) is always negative, the GSP arises if and only if \(B(\alpha _A,\alpha _B)<0\), which can be rearranged as
\(\square \)
Proof of Proposition 3
As we have pointed out in footnote 12 maximizing the expected utility of the representative individual of group i in the within-group symmetric equilibrium also maximizes the aggregate welfare of group i. Therefore, in this proof and the subsequent ones, we focus on the sharing rule \(\alpha _i\) that maximizes the expected utility of the representative individual in group i in the within-group symmetric equilibrium. We denote by \({EU}_i(\alpha _A,\alpha _B)\) the expected utility of the representative individual in group i.
From Proposition 1 and the equilibrium effort levels if both groups are active, the expected utility for the representative individual of group \(i=A,B\) is given by
where
From Proposition 1 and the equilibrium effort levels if only group i is active, the expected utility for group i is given by
If group i is inactive then from Proposition 1 it must be that \(\chi _i({\alpha }_i,\alpha _{j})\geqslant 0\). Notice that \(\chi _i({\alpha }_i,\alpha _{j})+\chi _j({\alpha }_i,\alpha _{j})=-n_A[2 n_B(1-p) +p]-n_Bp<0\). Hence if \(\chi _i({\alpha }_i,\alpha _{j})\geqslant 0\) then \(\chi _j({\alpha }_i,\alpha _{j})< 0\), meaning that if i is inactive j must be active. Therefore if i is inactive it holds that \(EU_i(\alpha _i)=0\).
Solving \(\chi _j(\alpha _{i2}(\alpha _j),\alpha _j)= 0\) we define \(\alpha _{i2}(\alpha _j) = \frac{n_i}{n_i - 1}[\frac{1-p}{p}+\frac{(n_j-1)\alpha _j+1}{n_j}]\). Given that \(\chi _j(\alpha _{i},\alpha _j)\) is strictly increasing with respect to \(\alpha _i\) it holds that \(\chi _j(\alpha _{i},\alpha _j)>0\) for all values \(\alpha _i>\alpha _{i2}(\alpha _j)\) and hence \(\alpha _{i2}(\alpha _j)\) is the minimum value of \(\alpha _i\) that guarantees that members of group j are inactive in equilibrium given any \(\alpha _j\).
Solving \(\chi _i(\alpha _{i3}(\alpha _j),\alpha _{j})=0\) we define \(\alpha _{i3}(\alpha _j)=\frac{{n_j} p+{n_i}[{n_j}+{\alpha _j}p-({\alpha _j}+1) {n_j} p]}{(1-{n_i}) {n_j}p}\). Given that \(\chi _i(\alpha _{i},\alpha _{j})\) is strictly decreasing with respect to \(\alpha _i\) then for all \({\dot{\alpha }}_i\in [0,\alpha _{i3}(\alpha _j)]\) it is true that \(\chi _i({\dot{\alpha }}_i,\alpha _{j})\geqslant 0\) and thus group i is inactive.
Comparing the expressions of \(\alpha _{i2}(\alpha _j)\) and \(\alpha _{i3}(\alpha _j)\) we have that \(\alpha _{i2}(\alpha _j)>\alpha _{i3}(\alpha _j)\) and therefore we can write the expected utility as follows:
Notice that \(EU_i(\alpha _i)\) is a continuous function since
Moreover, the second derivative of \({\hat{EU}}_i(\alpha _A,\alpha _B)\) is \(\frac{2n_B(n_A-1)^2[n_B(p-1)-p]p^2V}{n_A[n_Bp+n_A(2n_B(1-p)+p)]^2}<0\). Thus, \({\hat{EU}}_i(\alpha _A,\alpha _B)\) is a strictly concave function in the unrestricted domain \(\alpha _i\in (-\infty ,+\infty )\) and reaches a global maximum at
Finally, notice that \( {\tilde{EU}}_i(\alpha _i)\) is strictly decreasing with respect to \(\alpha _i\).
If \(\alpha _ {i1} (\alpha _j)\le \alpha _{i3}(\alpha _j)\) then for all \(\alpha _i>\alpha _{i3}(\alpha _j)\) the expected utility \(EU_i(\alpha _i)\) is strictly decreasing and hence negative. Therefore, \(EU_i(\alpha _i)\) takes its maximal value of zero for all values \({\dot{\alpha }}_i\in [0,\alpha _{i3}(\alpha _j)]\). Comparing the analytical expressions of \(\alpha _{i1} (\alpha _j)\) and \(\alpha _{i3}(\alpha _j)\) it is true that \(\alpha _{i1} (\alpha _j)\le \alpha _{i3}(\alpha _j)\) if and only if
If \(\alpha _{i1} (\alpha _j)\ge \alpha _{i2}(\alpha _j)\) and given that \( {\tilde{EU}}_i(\alpha _i)\) is strictly decreasing with respect to \(\alpha _i\) then \(EU_i(\alpha _i)\) has a unique global maximum at \(\alpha _{i2}(\alpha _j)\). Comparing the analytical expressions of \(\alpha _{i1} (\alpha _j)\) and \(\alpha _{i2}(\alpha _j)\) it is true that \(\alpha _{i1} (\alpha _j)\ge \alpha _{i2}(\alpha _j)\) if and only if
If \(\alpha _{i3}(\alpha _j)< \alpha _ {i1} (\alpha _j)< \alpha _{i2}(\alpha _j)\) then \(EU_i(\alpha _i)\) has a unique global maximum at \(\alpha _{i1} (\alpha _j)\).
Summing up, the best response of group i can be written as:
We now consider the nine possible combinations of the two groups’ best responses:
Case 1: \(i=A,B\) plays \(\alpha _{i1}(\alpha _j)\)
If \(i=A,B\) plays \(\alpha _{i1}(\alpha _j)\), it yields the following sharing rule:
where \(A_i=n_in_j(9-4n_i)-n_j(n_j+2)-2n_i\) and \(B_i=n_in_j(2n_i-7)+n_j(n_j+3)+3n_i-2\).
From the best responses, this is an equilibrium if and only if \({\tilde{\alpha }}_i<\alpha _i<{\hat{\alpha }}_i\) for \(i=A,B\), which is true as long as
Hence, both groups being active is an equilibrium if and only if \(p>p_1\).
Case 2: \(i=A,B\) plays \(\alpha _{i2}(\alpha _j)\)
If \(i=A,B\) plays \(\alpha _{i2}(\alpha _j)\), there is no solution, as the best responses are two parallel lines with positive slope.
Case 3: A plays \(\alpha _{A1}(\alpha _B)\) and B plays \(\alpha _{B2}(\alpha _A)\)
If A plays \(\alpha _{A1}(\alpha _B)\) and B plays \(\alpha _{B2}(\alpha _A)\), it yields the following sharing rules:
From the best responses, this is an equilibrium if and only if \(\alpha _A\leqslant {\tilde{\alpha }}_A\) and \({\tilde{\alpha }}_B<\alpha _B<{\hat{\alpha }}_B\). As the sharing rules above are such that \(\alpha _B>{\hat{\alpha }}_B\), the latter condition is never satisfied. Hence we do not reach an equilibrium.
Case 4: A plays \(\alpha _{A2}(\alpha _B)\) and B plays \(\alpha _{B1}(\alpha _A)\)
If A plays \(\alpha _{A2}(\alpha _B)\) and B plays \(\alpha _{B1}(\alpha _A)\), it yields the following sharing rules:
From the best responses, this is an equilibrium if and only if \(\alpha _B\leqslant {\tilde{\alpha }}_B\) and \({\tilde{\alpha }}_A<\alpha _A<{\hat{\alpha }}_A\). As the sharing rules above are such that \(\alpha _A>{\hat{\alpha }}_A\), the latter condition is never satisfied. Hence we do not reach an equilibrium.
Case 5: A plays \(\alpha _{A1}(\alpha _B)\) and B plays \({\dot{\alpha }}_B\in [0,\alpha _{B3}(\alpha _A)]\)
If A plays \(\alpha _{A1}(\alpha _B)\) and B plays \({\dot{\alpha }}_B\in [0,\alpha _{B3}(\alpha _A)]\), we are at an equilibrium if and only if \(\alpha _A\geqslant {\hat{\alpha }}_A\) and \({\tilde{\alpha }}_B<\alpha _B<{\hat{\alpha }}_B\), which is never satisfied. Let \(\alpha _A=\alpha _{A1}(\alpha _B)\). Then, the condition \(\alpha _B<\alpha _{B3}(\alpha _A)\) reduces to \(\alpha _B<{\tilde{\alpha }}_B\), hence we reach a contradiction.
Case 6: A plays \({\dot{\alpha }}_A\in [0,\alpha _{A3}(\alpha _B)]\) and B plays \(\alpha _{B1}(\alpha _A)\)
If A plays \({\dot{\alpha }}_A\in [0,\alpha _{A3}(\alpha _B)]\) and B plays \(\alpha _{B1}(\alpha _A)\), we are at an equilibrium if and only if \({\tilde{\alpha }}_A<\alpha _A<{\hat{\alpha }}_A\) and \(\alpha _B\geqslant {\hat{\alpha }}_B\), which is never satisfied. Let \(\alpha _B=\alpha _{B1}(\alpha _A)\). Then, the condition \(\alpha _A<\alpha _{A3}(\alpha _B)\) reduces to \(\alpha _A<{\tilde{\alpha }}_A\), hence we reach a contradiction.
Case 7: \(i=A,B\) plays \({\dot{\alpha }}_i\in [0,\alpha _{i3}(\alpha _j)]\)
If \(i=A,B\) plays \({\dot{\alpha }}_i\in [0,\alpha _{i3}(\alpha _j)]\), we immediately reach a contradiction, as \(\alpha _A\leqslant \alpha _{A3}(\alpha _B)\) and \(\alpha _B\leqslant \alpha _{B3}(\alpha _A)\) cannot hold simultaneously. The condition \(\alpha _A\leqslant \alpha _{A3}(\alpha _B)\) is equivalent to
Then, we have that
Hence we reach a contradiction.
Case 8: A plays \(\alpha _{A2}(\alpha _B)\) and B plays \({\dot{\alpha }}_B\in [0,\alpha _{B3}(\alpha _A)]\)
If A plays \(\alpha _{A2}(\alpha _B)\) and B plays \({\dot{\alpha }}_B\in [0,\alpha _{B3}(\alpha _A)]\), we are at an equilibrium if and only if \(\alpha _A\geqslant {\hat{\alpha }}_A\) and \(\alpha _B\leqslant {\tilde{\alpha }}_B\), which holds if and only if \(\alpha _B\in [ \frac{n_B (1-p)+p}{p},{\tilde{\alpha }}_B]\) and \(p\leqslant p_1\).
Case 9: A plays \({\dot{\alpha }}_A\in [0,\alpha _{A3}(\alpha _B)]\) and B plays \(\alpha _{B2}(\alpha _A)\)
If A plays \({\dot{\alpha }}_A\in [0,\alpha _{A3}(\alpha _B)]\) and B plays \(\alpha _{B2}(\alpha _A)\), we are at an equilibrium if and only if \(\alpha _A\leqslant {\tilde{\alpha }}_A\) and \(\alpha _B\geqslant {\hat{\alpha }}_B\), which is never satisfied. Let \(\alpha _B=\alpha _{B2}(\alpha _A)\). Then, \(\alpha _B\geqslant {\hat{\alpha }}_B\) reduces to \(\alpha _A\geqslant [n_A(1-p)+p]/p\). As \({\tilde{\alpha }}_A<[n_A(1-p)+p]/p\), the conditions for an equilibrium are never satisfied. \(\square \)
Proof of Proposition 4
Clearly, if the small group is inactive, the GSP cannot occur. If \(p>p_1\), from Proposition 2, the GSP arises if and only if
Substituting for the equilibrium value of \(\alpha _i\) (\(i=A,B\)) from Proposition 3, the above condition reduces to
which holds if and only if \(p>\frac{2 n_A n_B}{1+2 n_A n_B}=p_{GSP}\). \(\square \)
Proof of Proposition 5
We can obtain group i’s best response with restricted sharing rules by adding the constraint \(\alpha _i\le 1\) for \(i=A, B\) in the best response with unrestricted sharing rules derived in the proof of Proposition 3.
First, observe that \({\hat{\alpha }}_i>1\) for \(i=A, B\) and \(\forall p\in [0,1]\). Therefore, \({\dot{\alpha }}_i\) is not part of the best response with restricted sharing rules. As shown in the proof of Proposition 3, \(\alpha _{i1}(\alpha _j)\) is chosen over \(\alpha _{i2}(\alpha _j)\) if and only if \(\alpha _{i1}(\alpha _j)< \alpha _{i2}(\alpha _j)\). By taking this into account together with the new restriction \(\alpha _i\le 1\), one can write the best response for \(i=A, B\) and \(j\ne i\) as:
To find the solution we have to consider the nine combinations that arise from the previous best response. We can easily eliminate several combinations:
-
If \(i=A,B\) plays \(\alpha _{i1}(\alpha _j)\), the sharing rule of each group is the one obtained in case 1 in the proof of Proposition 3. As the value of \(\alpha _B\) always exceeds one we can discard this combination as a solution.
-
If \(i=A,B\) plays \(\alpha _{i2}(\alpha _j)\), there is no solution, as the best responses are parallel lines (case 2 in the proof of Proposition 3).
-
From cases 3 and 4 in the proof of Proposition 3, if i plays \(\alpha _{i1}(\alpha _j)\) and j plays \(\alpha _{j2}(\alpha _i)\), we obtain that
$$\begin{aligned} \alpha _i=\frac{n_i[n_j(1-p)+p]}{(n_i-1)p}>1 \end{aligned}$$Thus, i and j playing \(\alpha _{i1}(\alpha _j)\) and \(\alpha _{j2}(\alpha _i)\) for \(i=A, B\) and \(j\ne i\) never constitutes an equilibrium.
-
As \(\alpha _{i2}(1)= \frac{n_B}{(n_B-1) p} > 1\) for \(i=A, B\), there is no solution with i and j playing \(\alpha _{i2}(\alpha _j)\) and \(\alpha _j=1\) for \(i=A, B\) and \(j\ne i\).
-
Let \(\alpha _A= 1\) and \(\alpha _B(\alpha _A)=\alpha _{B1}(1)\). By evaluating \(\alpha _{B1}(1)\) at \(p=1\) we obtain that \(\alpha _B(1)= \frac{2 n_A n_B-n_A - n_B}{2 n_A(1- n_B)}>1\). Then, as \(\frac{\partial \alpha _{B1}(1)}{\partial p}= -\frac{2 n_B (n_A + p - n_A p)^2 + (n_A - n_B)p^2}{2 p^2 (n_A + p - n_A p)^2} <0\) for all \(p\in (0,1]\), it follows that \(\alpha _{B1}(1)>1\) for any \(p \in [0,1].\)
After eliminating the previous seven combinations we are now left with the two cases where \(\alpha _B =1\) and \(\alpha _A=\min \{\alpha _{A1}(1),1\}\). By substitution of \(\alpha _B=1\) we obtain the analytical value of \(\alpha _{A1}(1)\):
Solving \(\alpha _{A1}(1)=1\) with respect to p yields
As \(p_1\) (with the plus sign) is larger than one, we further ignore it. Thus we let \(\mathring{p}=p_2<1\) be the relevant value such that \(\alpha _{A1}(1)=1\). As \(\frac{\partial \alpha _{A1}(1)}{\partial p}= \frac{p^2 (n_A - n_B) - 2 n_A (n_B + p - n_B p)^2}{p^2 2 (n_B + p - n_B p)^2} <0\) for all \(p\in (0,1]\), it follows that \(\alpha _{A1}(1)>1\) for any \(p \in [0,\mathring{p})\). Therefore, at the unique equilibrium we have
-
\(\alpha _A=\alpha _B= 1\) for \(p \in (0,\mathring{p}]\)
-
\(\alpha _A=\alpha _{A1}(1)\) and \(\alpha _B= 1\) for \(p \in (\mathring{p},1].\)
Substituting these equilibrium values in the relevant expression obtained in Proposition 1, we find that \(\chi _i(\alpha _A,\alpha _B)<0\) for \(i=A, B\) and for all \(p\in (0,1]\). Hence in equilibrium both groups are active. \(\square \)
Proof of Proposition 6
From Proposition 2, for any \(p \in (0,1]\) the GSP arises if and only if \(\alpha _A<\frac{n_A-n_B+2\alpha _Bn_A(n_B-1)}{2n_B(n_A-1)}\). We know from Proposition 5 that \(\alpha _A=\alpha _B=1\) for \(p\in (0,\mathring{p}]\), hence the GSP arises if and only if \(\frac{n_A - n_B}{ n_A n_B-n_B} < 0\) which never holds given that \(n_A> n_B\).
For \(p\in (\mathring{p},1]\) we know that \(\alpha _B=1\) and \(\alpha _A=\alpha _{A1}(1)\). Taking the equilibrium value of \(\alpha _A(1)\) for \(p=1\) yields \(\alpha _A(1)=\frac{ 2 n_A n_B-n_A - n_B }{2 n_B( n_A-1)}\). From Proposition 2, the GSP arises at \(p=1\) if and only if \(\frac{ 2 n_A n_B-n_A - n_B }{2 n_B( n_A-1)}<\frac{n_A-n_B+2 n_A(n_B-1)}{2n_B(n_A-1)}\) which never holds given that \(n_A>n_B\). Thus, the GSP does not arise at \(p=1\). As we have shown that \(\frac{\partial \alpha _{A1}(1)}{\partial p} <0\) for all \(p\in (0,1]\), it follows that the GSP does not arise for any \(p \in (\mathring{p},1)\). \(\square \)
Rights and permissions
About this article

Cite this article
Balart, P., Flamand, S. & Troumpounis, O. Strategic choice of sharing rules in collective contests. Soc Choice Welf 46, 239–262 (2016). https://doi.org/10.1007/s00355-015-0911-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00355-015-0911-6