
Abstract
The levels of agility and flight or swimming performance demonstrated by insects, birds, fish, and even some aquatic invertebrates, are often vastly superior to what even the most advanced human-engineered vehicles operating in the same regimes are capable of. Key to this superior locomotion is the animal’s manipulation of the generation and shedding of vortices through optimal control of their motion kinematics. Many research efforts related to biological and bio-inspired propulsion focus on understanding the influence of the motion kinematics on the propulsion performance and on optimising the kinematics to improve efficiency or manoeuvrability. One of the first challenges to tackle when conducting a numerical or experimental optimisation of motion kinematics of objects moving through a fluid is the parameterisation of the motion kinematics. In this paper, we present three different approaches to parameterise kinematics, using a set of control points that are connected by a spline interpolation, a finite Fourier series, and a reduced-order modal reconstruction based on a proper orthogonal decomposition of a set of random walk trajectories. We compare the results and performance of the different parameterisations for the example of an experimental multi-objective optimisation of the pitching kinematics of a robotic flapping wing device. The optimisation was conducted using a genetic algorithm with the objective to maximise stroke average lift and efficiency. The performance is evaluated with regard to the diversity of the randomly created initial populations, the convergence behaviour of the optimisation, and the final Pareto fronts with their corresponding fitness values. The suggested approaches perform equally well and yield fitness values that are in close proximity for the different kinematic functions and different number of input parameters. The main differences are concerned with the implementation of experimental constraints and minor variations in the shape of the Pareto optimal motions are observed. Dedicated applications for each approach are suggested.
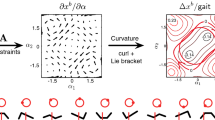
Graphical Abstract











Similar content being viewed by others


References
Ansari SA, Phillips N, Stabler G, Wilkins PC, Żbikowski R, Knowles K (2010) Experimental investigation of some aspects of insect-like flapping flight aerodynamics for application to micro air vehicles. In: Taylor GK, Triantafyllou MS, Tropea C (eds) Animal Locomotion. Springer, Berlin Heidelberg, pp 215–236
Audet C, Bigeon J, Cartier D, Le Digabel S, Salomon L (2021) Performance indicators in multiobjective optimization. Eur J Oper Res 292(2):397–422. https://doi.org/10.1016/j.ejor.2020.11.016
Bayiz Y, Ghanaatpishe M, Fathy H, Cheng B (2018) Hovering efficiency comparison of rotary and flapping flight for rigid rectangular wings via dimensionless multi-objective optimization. Bioinspir Biomim 13(4):046002
Berman GJ, Wang ZJ (2007) Energy-minimizing kinematics in hovering insect flight. J Fluid Mech 582:153–168
Bhat SS, Zhao J, Sheridan J, Hourigan K, Thompson MC (2020) Effects of flapping-motion profiles on insect-wing aerodynamics. J Fluid Mech 884:A8. https://doi.org/10.1017/jfm.2019.929
Chipperfield A, Fleming PJ, Pohlheim H, Fonseca CM (1995) The MATLAB Genetic Algorithm Toolbox. IEE 1995:10–10. https://doi.org/10.1049/ic:19950061
Floreano D, Wood RJ (2015) Science, technology and the future of small autonomous drones. Nature 521(7553):460–466
Gehrke A, Mulleners K (2021) Phenomenology and scaling of optimal flapping wing kinematics. Bioinspir Biomim 16(2):026016. https://doi.org/10.1088/1748-3190/abd012
Gehrke A, Guyon-Crozier G, Mulleners K (2018) Genetic Algorithm Based Optimization of Wing Rotation in Hover. Fluids 3(3):59. https://doi.org/10.3390/fluids3030059
Hamming RW (1986) Numerical methods for scientists and engineers, 2nd edn. Dover, England
Hawkes EW, Lentink D (2016) Fruit fly scale robots can hover longer with flapping wings than with spinning wings. J R Soc Interface 13(123):20160730
Krishna S, Green MA, Mulleners K (2018) Flowfield and force evolution for a symmetric hovering flat-plate wing. AIAA J 56(4):1360–1371. https://doi.org/10.2514/1.J056468
Krishna S, Green MA, Mulleners K (2019) Effect of pitch on the flow behavior around a hovering wing. Exp Fluids 60(5):60–86. https://doi.org/10.1007/s00348-019-2732-3
Lamont G, Veldhuizen DV (1999) Multiobjective evolutionary algorithms: classifications, analyses, and new innovations
Liu H, Aono H (2009) Size effects on insect hovering aerodynamics: an integrated computational study. Bioinspir Biomim 4(1):015002
Manar F, Medina A, Jones AR (2014) Tip vortex structure and aerodynamic loading on rotating wings in confined spaces. Exp Fluids. https://doi.org/10.1007/s00348-014-1815-4
Mandre S, Breuer KS, Miller MJ (2019) Optimizing the periodic motion of a foil at high-reynolds number. In: 9th International Symposium on Adaptive Motion of Animals and Machines (AMAM 2019), EPFL, Lausanne, Switzerland, https://doi.org/10.5075/epfl-BIOROB-AMAM2019-63
Martin N, Gharib M (2019) Experimental trajectory optimization of a flapping fin propulsor using an evolutionary strategy. Bioinspir Biomim 14(1):016010
Sane SP, Dickinson MH (2001) The control of flight force by a flapping wing: lift and drag production. J Exp Biol 204(15):2607–2626. https://doi.org/10.1242/jeb.204.15.2607
Shyy W (2011) Aerodynamics of low Reynolds number flyers. Cambridge Univ. Pr., OCLC: 730008577
Shyy W, Berg M, Ljungqvist D (1999) Flapping and flexible wings for biological and micro air vehicles. Prog Aerosp Sci 35(5):455–505
Shyy W, Aono H, Chimakurthi S, Trizila P, Kang CK, Cesnik C, Liu H (2010) Recent progress in flapping wing aerodynamics and aeroelasticity. Prog Aerosp Sci 46(7):284–327
Sum WuK, Nowak J, Breuer KS (2019) Scaling of the performance of insect-inspired passive-pitching flapping wings. J R Soc Interface 16(161):20190609. https://doi.org/10.1098/rsif.2019.0609
Sun M, Tang J (2002) Unsteady aerodynamic force generation by a model fruit fly wing in flapping motion. J Exp Biol 205(1):55–70. https://doi.org/10.1242/jeb.205.1.55
Tandon S, Sujith RI (2021) Condensation in the phase space and network topology during transition from chaos to order in turbulent thermoacoustic systems. Chaos 31(4):043126. https://doi.org/10.1063/5.0039229
Tuncer IH, Kaya M (2005) Optimization of flapping airfoils for maximum thrust and propulsive efficiency. AIAA J 43(11):2329–2336
Zhang J, Small M (2006) Complex network from pseudoperiodic time series: Topology versus dynamics. Phys Rev Lett 96(23):238701. https://doi.org/10.1103/PhysRevLett.96.238701
Acknowledgements
The authors thank Guillaume de Guyon-Crozier for the help in implementing the fifth-degree spline kinematic function. Funding has been provided by the Swiss National Science Foundation under Grant Number 200021_175792.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Busch, C., Gehrke, A. & Mulleners, K. On the parametrisation of motion kinematics for experimental aerodynamic optimisation. Exp Fluids 63, 10 (2022). https://doi.org/10.1007/s00348-021-03367-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-021-03367-5