
Abstract
We analyze the sources of error in differential optical flow methods using techniques for the analysis of partial differential equations. We first derive an a priori error bound for the estimated optical flow field. We then systematically interpret this error bound and show that the estimation error is primarily bounded by the best-fit approximation error—which quantifies the fidelity with which one can represent the true optical flow field by a chosen or learned set of basis functions—divided by a stability constant—which quantifies one’s ability to infer the optical flow field given the information content of the acquired data. We also show that the estimation error is bounded by effects associated with the finite temporal and spatial resolution of the acquired data. In particular, we show that the main finite resolution effects are related to the finite differencing and time averaging of the measured intensity fields. Finally, we demonstrate the error bound numerically using synthetic three-dimensional data sets based on direct numerical simulations of homogeneous isotropic turbulence and transitional boundary layer flow provided by Johns Hopkins University (Li et al. in J Turbul 9:N31, 2008; Zaki in Flow Turbul Combust in 91(3):451–473, 2013).
Graphic abstract









Similar content being viewed by others
References
Álvarez L, Castano C, García M, Krissian K, Mazorra L, Salgado A, Sánchez J (2009) A new energy-based method for 3D motion estimation of incompressible PIV flows. Comput Vis Image Underst 113(7):802–810
Aubert G, Kornprobst P (1999) A mathematical study of the relaxed optical flow problem in the space \(BV(\Omega )\). SIAM J Math Anal 30(6):1282–1308
Aubert G, Deriche R, Kornprobst P (1999) Computing optical flow via variational techniques. SIAM J Appl Math 60(1):156–182
Barron JL, Fleet DJ, Beauchemin SS (1994) Performance of optical flow techniques. Int J Comput Vision 12(1):43–77
Beauchemin SS, Barron JL (1995) The computation of optical flow. ACM Comput Surv (CSUR) 27(3):433–466
Béréziat D, Herlin I, Younes L (2000) A generalized optical flow constraint and its physical interpretation. In: Proceedings IEEE conference on computer vision and pattern recognition. CVPR 2000 (Cat. No. PR00662), vol 2. IEEE, pp 487–492
Bergen JR, Burt PJ, Hingorani R, Peleg S et al (1992) A three-frame algorithm for estimating two-component image motion. IEEE Trans Pattern Anal Mach Intell 14(9):886–896
Brenner SC, Scott LR (2008) The mathematical theory of finite element methods. Springer, New York. https://doi.org/10.1007/978-0-387-75934-0
Brox T, Malik J (2010) Large displacement optical flow: descriptor matching in variational motion estimation. IEEE Trans Pattern Anal Mach Intell 33(3):500–513
Brox T, Bruhn A, Papenberg N, Weickert J (2004) High accuracy optical flow estimation based on a theory for warping. In: European Conference on Computer Vision. Springer, pp 25–36
Brumm M, Marcinczak JM, Grigat RR (2015) Improved confidence measures for variational optical flow. In: VISAPP (3), pp 389–394
Buch KA, Dahm WJA (1996) Experimental study of the fine-scale structure of conserved scalar mixing in turbulent shear flows. Part 1. \(\text{ Sc } \gg 1\). J Fluid Mech 317:21–71
Cai S, Mémin E, Dérian P, Xu C (2017) Motion estimation under location uncertainty for turbulent fluid flows. Exp Fluids 59(1):8
Cohen I, Herlin I (1999) Non uniform multiresolution method for optical flow and phase portrait models: environmental applications. Int J Comput Vis 33(1):29–49
Corpetti T, Mémin É, Pérez P (2002) Dense estimation of fluid flows. IEEE Trans Pattern Anal Mach Intell 24(3):365–380
Corpetti T, Heitz D, Arroyo G, Mémin E, Santa-Cruz A (2006) Fluid experimental flow estimation based on an optical-flow scheme. Exp Fluids 40(1):80–97
Cuzol A, Hellier P, Mémin E (2007) A low dimensional fluid motion estimator. Int J Comput Vision 75(3):329–349
Elsinga GE, Scarano F, Wieneke B, van Oudheusden BW (2006) Tomographic particle image velocimetry. Exp Fluids 41(6):933–947
Enkelmann W (1988) Investigations of multigrid algorithms for the estimation of optical flow fields in image sequences. Comput Vis Graphics Image Process 43(2):150–177
Ern A, Guermond JL (2010) Theory and practice of finite elements. Springer, New York
Fleet D, Weiss Y (2005) Optical flow estimation. In: Handbook of mathematical models in computer vision. Springer, pp 237–257
Gehrig SK, Scharwächter T (2011) A real-time multi-cue framework for determining optical flow confidence. In: 2011 IEEE international conference on computer vision workshops (ICCV Workshops). IEEE, pp 1978–1985
Gibson JJ (1950) The perception of the visual world. Houghton Mifflin, Boston
Haußecker H, Spies H (2000) Motion. In: Computer vision and applications. Elsevier, pp 347–395
Haußecker HW, Fleet DJ (2001) Computing optical flow with physical models of brightness variation. IEEE Trans Pattern Anal Mach Intell 23(6):661–673
Héas P, Mémin E, Papadakis N, Szantai A (2007) Layered estimation of atmospheric mesoscale dynamics from satellite imagery. IEEE Trans Geosci Remote Sens 45(12):4087–4104
Heitz D, Héas P, Mémin E, Carlier J (2008) Dynamic consistent correlation-variational approach for robust optical flow estimation. Exp Fluids 45(4):595–608
Heitz D, Mémin E, Schnörr C (2009) Variational fluid flow measurements from image sequences: synopsis and perspectives. Exp Fluids 48(3):369–393
Horn BK, Schunck BG (1981) Determining optical flow. Artif Intell 17(1–3):185–203
Kadri-Harouna S, Dérian P, Héas P, Mémin E (2013) Divergence-free wavelets and high order regularization. Int J Comput Vis 103(1):80–99
Kondermann C, Kondermann D, Jähne B, Garbe C (2007) An adaptive confidence measure for optical flows based on linear subspace projections. In: Joint pattern recognition symposium. Springer, pp 132–141
Kondermann C, Mester R, Garbe C (2008) A statistical confidence measure for optical flows. In: European conference on computer vision. Springer, pp 290–301
Kumashiro K (2019) A physics-constrained three-dimensional three-component particle-based velocimetry method for constant-density flows. Master’s thesis, University of Toronto
Kybic J, Nieuwenhuis C (2011) Bootstrap optical flow confidence and uncertainty measure. Comput Vis Image Underst 115(10):1449–1462
Lavoie P, Avallone G, De Gregorio F, Romano G, Antonia R (2007) Spatial resolution of PIV for the measurement of turbulence. Exp Fluids 43(1):39–51
Li Y, Perlman E, Wan M, Yang Y, Meneveau C, Burns R, Chen S, Szalay A, Eyink G (2008) A public database cluster and applications to study Lagrangian evolution of velocity increments in turbulence. J Turbul 9:N31
Liu T, Shen L (2008) Fluid flow and optical flow. J Fluid Mech 614:253–291
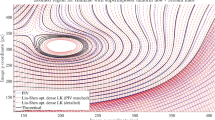
Liu T, Merat A, Makhmalbaf M, Fajardo C, Merati P (2015) Comparison between optical flow and cross-correlation methods for extraction of velocity fields from particle images. Exp Fluids 56(8):166
Lowitzsch S (2004) Approximation and interpolation employing divergence-free radial basis functions with applications. PhD thesis, Texas A&M University
Lucas BD (1984) Generalized image matching by the method of differences. PhD thesis, Carnegie-Mellon University
Lucas BD, Kanade (1981) An iterative image registration technique with an application to stereo vision. In: Proceedings of the 7th international joint conference on artifical intelligence, Vancouver, British Columbia
Mac Aodha O, Humayun A, Pollefeys M, Brostow GJ (2012) Learning a confidence measure for optical flow. IEEE Trans Pattern Anal Mach Intell 35(5):1107–1120
Macêdo I, Castro R (2008) Learning divergence-free and curl-free vector fields with matrix-valued kernels. Instituto Nacional de Matemática Pura e Aplicada, Brasil, Tech Rep
Mémin E, Pérez P (1998) Dense estimation and object-based segmentation of the optical flow with robust techniques. IEEE Trans Image Process 7(5):703–719
Papadakis N, Corpetti T, Mémin E (2007) Dynamically consistent optical flow estimation. In: 2007 IEEE 11th international conference on computer vision. IEEE, pp 1–7
Papenberg N, Bruhn A, Brox T, Didas S, Weickert J (2006) Highly accurate optic flow computation with theoretically justified warping. Int J Comput Vision 67(2):141–158
Perlman E, Burns R, Li Y, Meneveau C (2007) Data exploration of turbulence simulations using a database cluster. In: Proceedings of the 2007 ACM/IEEE conference on supercomputing. ACM, p 23
Quarteroni A, Valli A (1997) Numerical approximation of partial differential equations. Springer, New York. https://doi.org/10.1007/978-3-540-85268-1
Quénot GM, Pakleza J, Kowalewski TA (1998) Particle image velocimetry with optical flow. Exp Fluids 25(3):177–189
Raffel M, Willert CE, Scarano F, Kähler CJ, Wereley ST, Kompenhans J (2018) Particle image velocimetry: a practical guide. Springer, Berlin
Ruhnau P, Schnörr C (2007) Optical Stokes flow estimation: an imaging-based control approach. Exp Fluids 42(1):61–78
Ruhnau P, Kohlberger T, Schnörr C, Nobach H (2004) Variational optical flow estimation for particle image velocimetry. Exp Fluids 38(1):21–31
Ruhnau P, Yuan J, Schnörr C (2007) On variational methods for fluid flow estimation. In: Jähne B, Mester R, Barth E, Scharr H (eds) Complex motion. Springer, Berlin, pp 124–145
Scarano F (2012) Tomographic PIV: principles and practice. Meas Sci Technol 24(1):012001
Schmidt B, Sutton J (2019) High-resolution velocimetry from tracer particle fields using a wavelet-based optical flow method. Exp Fluids 60(3):37
Schmidt B, Sutton J (2020) Improvements in the accuracy of wavelet-based optical flow velocimetry (wOFV) using an efficient and physically based implementation of velocity regularization. Exp Fluids 61(2):32
Sugii Y, Nishio S, Okuno T, Okamoto K (2000) A highly accurate iterative PIV technique using a gradient method. Meas Sci Technol 11(12):1666
Sun J, Quevedo FJ, Bollt E (2018) Bayesian optical flow with uncertainty quantification. Inverse Prob 34(10):105008
Suter D (1994) Motion estimation and vector splines. Proc Conf Comput Vis Pattern Recognit 94:939–942
Wang B, Cai Z, Shen L, Liu T (2015) An analysis of physics-based optical flow. J Comput Appl Math 276:62–80
Wannenwetsch AS, Keuper M, Roth S (2017) Probflow: joint optical flow and uncertainty estimation. In: Proceedings of the IEEE international conference on computer vision, pp 1173–1182
Weickert J, Schnörr C (2001a) A theoretical framework for convex regularizers in PDE-based computation of image motion. Int J Comput Vision 45(3):245–264
Weickert J, Schnörr C (2001b) Variational optic flow computation with a spatio-temporal smoothness constraint. J Math Imaging Vis 14(3):245–255
Wu YT, Kanade T, Li CC, Cohn J (2000) Image registration using wavelet-based motion model. Int J Comput Vision 38(2):129–152
Yang Z, Johnson M (2017) Hybrid particle image velocimetry with the combination of cross-correlation and optical flow method. J Vis 20(3):625–638
Yuan J, Schnörr C, Mémin E (2007) Discrete orthogonal decomposition and variational fluid flow estimation. J Math Imaging Vis 28(1):67–80
Zaki TA (2013) From streaks to spots and on to turbulence: exploring the dynamics of boundary layer transition. Flow Turbul Combust 91(3):451–473
Zhong Q, Yang H, Yin Z (2017) An optical flow algorithm based on gradient constancy assumption for PIV image processing. Meas Sci Technol 28(5):055208
Acknowledgements
This work was supported by the US Air Force Office of Scientific Research under Grant FA9550-17-1-0011 (Project Monitor Dr. Chiping Li) and the Natural Science and Engineering Research Council of Canada through an Alexander Graham Bell Canada Graduate Scholarship. Computations were performed on the Niagara supercomputer at the SciNet HPC Consortium. SciNet is funded by the Canada Foundation for Innovation; the Government of Ontario; Ontario Research Fund - Research Excellence; and the University of Toronto.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Proof of a priori error bound
A Proof of a priori error bound
A.1 Key lemmas
Before we prove error bound (8), we state four key lemmas required for the proof.
Lemma 1
(Midpoint rule error bound) For all twice differentiable \(f: \varOmega \rightarrow \mathbb {R}\),
for some \(c_{\rm q}\) independent of h.
Proof
See Theorem 8.5 of (Ern and Guermond 2010). \(\square\)
Lemma 2
(Filter error bound) For any twice differentiable \(I(\cdot ,t) : \varOmega \rightarrow \mathbb {R}\),
for some \(c_{\rm f}\) independent of h.
Proof
We first introduce an \(n_\mathrm {d}\)-cube centered about \(\underline{x}\), \(\omega (\underline{x}) \,{:}=\,\underline{x} + (-h/2,h/2)^{n_\mathrm {d}}\). We then note that by the definition of the rectangular filter, for any \(\underline{x} \in \varOmega\) and \(t \in T\),
where \(\mu (\omega (\underline{x}))\) denotes the measure of \(\omega (\underline{x})\), and the inequality follows from Lemma 8.4 of (Ern and Guermond 2010). \(\square\)
Lemma 3
(Time-averaged finite difference error bound) Let \(t^\star \,{:}=\,t_0 + \varDelta t/2\) be the midpoint time in T. For any three-times differentiable \(I : \varOmega \times T \rightarrow \mathbb {R}\),
for some constants \(c_{\rm t}\) and \(c_{\rm fdx}\) independent of h and \(\varDelta t\).
Proof
We first decompose the error as
where \(\overline{{\underline{\nabla }}}I \,{:}=\,({\underline{\nabla }}I(\cdot , t_0) + {\underline{\nabla }}I(\cdot , t_0 + \varDelta t))/2\) is the time-averaged gradient. To bound the first term, we note that the time averaging is equivalent to evaluating the linear interpolant at the midpoint time \(t^\star\). Hence,
To bound the second term, we note that the error in the centered finite difference is bounded by
The application of the time-averaging and finite difference bounds to the error decomposition yields the desired result. \(\square\)
Lemma 4
(Temporal finite difference error bound) Let \(t^\star \,{:}=\,t_0 + \varDelta t/2\) be the midpoint time in T. For any \(I : \varOmega \times T \rightarrow \mathbb {R}\) that is three-times differentiable in time,
for some \(c_{\rm fdt}\) independent of \(\varDelta t\).
Proof
This is a standard centered difference error bound. \(\square\)
A.2 Problem statement
As stated in Sect. 2.2, the estimated OF field \(\underline{u}_\delta \in \mathcal{W}_n\) is given by
We note that \(\underline{u}_\delta\) is the solution to the following Petrov–Galerkin problem: Find \(\underline{u}_\delta \in \mathcal{W}_n\) such that
where \(\mathcal{V}_\delta {:}{=}\{ v \ \mid \ v = \overline{\underline{\nabla }}_h I_h \cdot \underline{w}_n, \forall \underline{w}_n \in \mathcal{W}_n \}\) and
We now assume that the true OF field \(\underline{u} \in \mathcal{W}\,{:}=\,H(\text {div};\varOmega )\) satisfies
where
and \(t^\star \,{:}=\,t_0 + \varDelta t/2\).
We wish to bound the estimation error \(\Vert \underline{u} - \underline{u}_\delta \Vert _{\mathcal{W}}\).
A.3 A priori error estimate
To bound the estimation error, we first recall the Petrov–Galerkin error bound (e.g., Ern and Guermond 2010):
We now analyze terms (I)–(III) individually.
Let us begin with (I). Here we seek a bound for the stability constant \(\alpha _\delta\) defined as (e.g., Ern and Guermond 2010)
We note that the continuity constant \(\gamma\) is defined as (e.g., Ern and Guermond 2010)
and, as such, is dictated by the information content of the acquired data; it does not depend on the particular OFME method used and serves only to rescale the parameter-dependent stability constant.
Before we continue with our analysis, we clarify three points regarding the notation that we use in the remainder of this proof. First, for the sake of notational convenience, we let \(\hat{D}^Q f\) be the collection of functions \(f,Df, \ldots ,D^Qf\) satisfying the identity
Second, we introduce the simplifying notation \({I^\star }\,{:}=\,I(\cdot ,t^*)\). Third, the bounding coefficients \(c_q\) and C are generic and, hence, reused in multiple inequalities.
We now return to our analysis. By the definition of \(a_\delta (\cdot ,\cdot )\) and the fact that \(\Vert \cdot \Vert _{\mathcal{V}}\equiv \Vert \cdot \Vert _{L^2(\varOmega )}\), \(\alpha _\delta\) specializes to
Because term (III) is divided by \(\alpha _\delta\), we wish to bound \(\alpha _\delta\) from below so that \(1/\alpha _\delta\) is bounded from above.
We note that the error due to the quadrature is bounded by
Here the first inequality follows from the quadrature error bound (Lemma 1); the second inequality follows from Hölder’s inequality; the third inequality follows from Schwarz inequality; and the last inequality follows from the equivalence of norms of functions in polynomial spaces \(\mathcal{W}_n\) and \(\mathcal{V}_\delta\). It hence follows that
Here the first inequality follows from the substitution of (12) to the second term, and the second to last equality follows from choosing \(v = \overline{\underline{\nabla }}_h I_h \cdot \underline{w}\).
We next analyze (II). We first decompose the term as
Term (II.1) is the error due to the quadrature and is bounded by
Here the first inequality follows from the quadrature error bound (Lemma 1); the second inequality follows from Hölder’s inequality; the third inequality follows from Schwarz inequality; and the last inequality follows from the equivalence of norms of functions in polynomial spaces \(\mathcal{W}_n\) and \(\mathcal{V}_\delta\).
To bound (II.2), we first note that
where the first equality follows from the definition of the filter; the second equality follows from the commutativity of the filter \(\varPi _h*\) with the time-averaged finite difference operator \(\overline{{\underline{\nabla }}}_h\); the first inequality is the triangle inequality; the second inequality follows from the property \(\Vert \varPi _h* f \Vert _{L^\infty (\varOmega )} \le \Vert f \Vert _{L^\infty (\varOmega )}\) \(\forall f\); and the last inequality follows from the filter error bound (Lemma 2) and the time-averaged finite difference error bound (Lemma 3). It follows that
where the second inequality follows from the quadrature error bound.
Combining our results for (II.1) and (II.2), we thus find that (II) is bounded by
This bound identifies four sources of error that are second order in h or \(\varDelta t\): quadrature, filtering, spatial time difference and time averaging.
Finally, we analyze (III). We first note that
Term (III.1) is the error due to the quadrature and is bounded by
Here the first inequality follows from the quadrature error bound (Lemma 1); the second inequality follows from Hölder’s inequality; the third inequality follows from the definition of the norms; and the last inequality follows from the equivalence of norms of functions in polynomial spaces \(\mathcal{W}_n\) and \(\mathcal{V}_\delta\).
To bound (III.2), we first note that
where the first equality follows from the definition of the filter; the second equality follows from the commutativity of the filter \(\varPi _h*\) with the temporal finite difference operator \(\partial _{t,\varDelta t}\); the first inequality is the triangle inequality; the second inequality follows from the property \(\Vert \varPi _h* f \Vert _{L^\infty (\varOmega )} \le \Vert f \Vert _{L^\infty (\varOmega )}\) \(\forall f\); and the last inequality follows from the filter error bound (Lemma 2) and the temporal finite difference error bound (Lemma 4). It follows that
where the second inequality follows from the quadrature error bound.
Combining our results for (III.1) and (III.2), we thus find that (III) is bounded by,
This bound identifies three sources of error that are second order in either h or \(\varDelta t\): quadrature, filtering and temporal time difference.
Substituting (13) and (14) into (11) and evaluating the suprema, we obtain the desired bound. \(\square\)
Rights and permissions
About this article

Cite this article
Kumashiro, K., Steinberg, A.M. & Yano, M. A functional error analysis of differential optical flow methods. Exp Fluids 62, 159 (2021). https://doi.org/10.1007/s00348-021-03244-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-021-03244-1