
Abstract
Geometric singular perturbation theory provides a powerful mathematical framework for the analysis of ‘stationary’ multiple time-scale systems which possess a critical manifold, i.e. a smooth manifold of steady states for the limiting fast subsystem, particularly when combined with a method of desingularisation known as blow-up. The theory for ‘oscillatory’ multiple time-scale systems which possess a limit cycle manifold instead of (or in addition to) a critical manifold is less developed, particularly in the non-normally hyperbolic regime. We use the blow-up method to analyse the global oscillatory transition near a regular folded limit cycle manifold in a class of three time-scale ‘semi-oscillatory’ systems with two small parameters. The systems considered behave like oscillatory systems as the smallest perturbation parameter tends to zero, and stationary systems as both perturbation parameters tend to zero. The additional time-scale structure is crucial for the applicability of the blow-up method, which cannot be applied directly to the two time-scale oscillatory counterpart of the problem. Our methods allow us to describe the asymptotics and strong contractivity of all solutions which traverse a neighbourhood of the global singularity. Our main results cover a range of different cases with respect to the relative time-scale of the angular dynamics and the parameter drift. We demonstrate the applicability of our results for systems with periodic forcing in the slow equation, in particular for a class of Liénard equations. Finally, we consider a toy model used to study tipping phenomena in climate systems with periodic forcing in the fast equation, which violates the conditions of our main results, in order to demonstrate the applicability of classical (two time-scale) theory for problems of this kind.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Many physical and applied systems featuring multiple time-scale dynamics can be mathematically modelled by singularly perturbed systems of ordinary differential equations in the standard form
where \(x \in {\mathbb {R}}^m\), \(y \in {\mathbb {R}}^n\), \((\cdot )' = \textrm{d}/\textrm{d}t\), \(0 < \varepsilon \ll 1\) is a small perturbation parameter and the functions \(f,g: {\mathbb {R}}^m \times {\mathbb {R}}^n \times [0,\varepsilon _0] \rightarrow {\mathbb {R}}^m \times {\mathbb {R}}^n\) are at least \(C^1\)-smooth. If the limiting system obtained from (1) when \(\varepsilon \rightarrow 0\) possesses a critical manifold, i.e. if the set of equilibria \(S = \{(x,y): f(x,y,0) = 0 \}\) forms an n-dimensional submanifold of the phase space \({\mathbb {R}}^m \times {\mathbb {R}}^n\), then system (1) can be analysed using a mathematical framework known as geometric singular perturbation theory (GSPT) (Fenichel 1979; Jones 1995; Kuehn 2015; Wechselberger 2020). Typical GSPT analyses consist of two parts, depending on whether S is normally hyperbolic, i.e. depending on whether the linearisation with respect to the fast variables \(D_xf|_S\) when \(\varepsilon = 0\) is hyperbolic.
The local dynamics near normally hyperbolic submanifolds of S can be accurately described using Fenichel–Tikhonov theory (Fenichel 1979; Tikhonov 1952) (see also Jones 1995; Kuehn 2015; Wechselberger 2020; Wiggins 1994), which ensures that solutions are well approximated by regular perturbations of singular trajectories constructed as concatenations of trajectory segments from the distinct limiting problems which arise when \(\varepsilon \rightarrow 0\) in system (1) on the fast and slow time-scales t and \(\tau = \varepsilon t\), respectively. However, Fenichel–Tikhonov theory breaks down in the non-normally hyperbolic regime. The dynamics near non-normally hyperbolic points or submanifolds of S, which generically correspond to bifurcations in the layer problem (1)\(|_{\varepsilon = 0}\), can be studied using various techniques. A particularly powerful approach is the so-called blow-up method, which was pioneered for fast–slow systems in Dumortier and Roussarie (1996) and later in Krupa and Szmolyan (2001a), Krupa and Szmolyan (2001b), Krupa and Szmolyan (2001c). In these works and many others (see Jardón-Kojakhmetov and Kuehn 2021 for a recent survey), the authors showed that the loss of hyperbolicity at a non-normally hyperbolic point or submanifold Q can often be ‘resolved’ after lifting the problem to a higher-dimensional space in which Q is blown-up to a higher-dimensional manifold \({\mathcal {Q}}\). Following a suitable desingularisation, which amounts to a singular transformation of time, a non-trivial vector field with improved hyperbolicity properties can be identified on \({\mathcal {Q}}\). This allows one to study the dynamics in the non-normally hyperbolic regime using classical dynamical systems methods like regular perturbation and centre manifold theory. We refer to Kosiuk and Szmolyan (2009), Kosiuk and Szmolyan (2011), Kosiuk and Szmolyan (2016), Kristiansen and Szmolyan (2021), Krupa and Szmolyan (2001a), Krupa and Szmolyan (2001b), Krupa and Szmolyan (2001c), Kuehn and Szmolyan (2015), Szmolyan and Wechselberger (2001), Szmolyan and Wechselberger (2004) for seminal works in both applied and theoretical contexts, based on this combination of Fenichel–Tikhonov theory and the blow-up method.
The mathematical theory and methods described above are local in the sense that they apply specifically to fast–slow systems possessing an n-dimensional critical manifold S. A corresponding global theory in which the layer problem (1)\(|_{\varepsilon = 0}\) possesses a limit cycle manifold in place of (or in addition to) a critical manifold is less developed. Following Il’yashenko (1997), we shall refer to the former class as stationary fast–slow systems and the latter class as oscillatory fast–slow systems. A program for the development of a global GSPT which is general enough to encompass oscillatory fast–slow systems was initiated by Guckenheimer (1996); however, a number of key analytical and methodological obstacles to its development remain.
One such obstacle concerns the development of Fenichel–Tikhonov theory for oscillatory fast–slow systems. A number of authors have made important contributions in this direction. Anosova showed that normally hyperbolic limit cycle manifolds in oscillatory fast–slow systems of form (1) persist as \(O(\varepsilon )\)-close locally invariant manifolds for the perturbed system (Anosova 1999, 2002), similarly to the persistence of a normally hyperbolic critical manifold in Fenichel–Tikhonov theory. For oscillatory fast–slow systems with one slow variable, the persistence and contractivity properties of the centre-stable/unstable manifolds have been described in detail in Jelbart and Kuehn (2023) using properties of the Poincaré map and a discrete GSPT framework developed therein. This study also yielded an asymptotic formula for the slow drift along the manifold, which agrees with the formula predicted by classical averaging theory (Pontryagin and Rodygin 1960).
Global theory for oscillatory fast–slow systems in the non-normally hyperbolic regime is less developed, despite the ubiquity of fast–slow extensions of global bifurcations in applications, for example in biochemical models exhibiting bursting (Bertram et al. 1995; Ermentrout and Terman 2010; Guckenheimer et al. 2005; Rinzel 1987). Notable exceptions include the study of a dynamic saddle-node of cycles bifurcation in a variant of the FitzHugh–Nagumo equations in Kirillov and Nekorkin (2015), and the rigorous topological classification of so-called torus canards in Vo (2017), which occur near folded cycle bifurcations in the layer problem in oscillatory fast–slow systems (Vo 2017). See e.g. Baspinar et al. (2021), Benes et al. (2011), Desroches et al. (2012), Kramer et al. (2008), Roberts et al. (2015)) for more (predominantly numerical) important work on torus canards. The results in Vo (2017) were obtained using averaging theory, Floquet theory and (stationary) GSPT. Indirect contributions to the non-normally hyperbolic theory for oscillatory fast–slow systems have also been made via the study of non-normally hyperbolic singularities in fast–slow maps, since these can be used to infer dynamical properties of corresponding limit cycle bifurcations (or fast–slow extensions thereof) in one greater dimension. The slow passage through a flip/period-doubling bifurcation (and even through an entire period-doubling cascade) was treated in Baesens (1991, 1995), and further results on the slow passage through discrete transcritical, pitchfork and Neimark–Sacker/torus-type bifurcations have been derived using non-standard analysis; we refer to the review paper (Fruchard and Schäfke 2009) and the references therein.
In general, the development of mathematical methods for handling non-hyperbolic dynamics in oscillatory fast–slow systems is complicated by the fact that local techniques like the blow-up method rely upon near-equilibrium properties possessed by stationary but not oscillatory fast–slow systems. The desingularisation step in blow-up analyses, for example, relies upon a formal division of the blown-up vector field by zero. This step is crucial for obtaining a desingularised vector field with improved hyperbolicity properties, but it is only well-defined if the original (blown-up) vector field is in equilibrium wherever it is formally divided by zero. For oscillatory fast–slow systems of form (1), a ‘typical’ non-normally hyperbolic cycle has non-equilibrium dynamics, so it cannot be desingularised and the blow-up method does not apply.
The aim of this work is to show that stationary methods (in particular the blow-up method) which may not apply for oscillatory fast–slow systems, may be applicable in the study of oscillatory multiple time-scale systems with at least three distinct time-scales. Specifically, we consider systems of the form
where \((r,\theta ,y) \in {\mathbb {R}}_{\ge 0} \times {\mathbb {R}}/ {\mathbb {Z}} \times {\mathbb {R}}\) are cylindrical coordinates, \(0 < \varepsilon _1, \varepsilon _2 \ll 1\) are singular perturbation parameters, and \(f,g,h: {\mathbb {R}}_{\ge 0} \times {\mathbb {R}}/ {\mathbb {Z}} \times {\mathbb {R}}\times [0,\varepsilon _{1,0}] \times [0,\varepsilon _{2,0}] \rightarrow {{\mathbb {R}}}\) are sufficiently smooth for our purposes. Depending upon the relative magnitude of \(\varepsilon _1\) and \(\varepsilon _2\), system (2) has either two or three distinct time-scales. Although we present results on a range of different cases, we are primarily interested in the case
which defines a class of three time-scale semi-oscillatory systems that are in a certain sense ‘in between’ the classes of stationary and oscillatory fast–slow systems described above. Heuristically, this is because under suitable assumptions (to be outlined in detail in Sect. 2), system (2) is an oscillatory fast–slow system with respect to the limit \(\varepsilon _1 > 0, \ \varepsilon _2 \rightarrow 0\), and a stationary fast–slow system with respect to the double singular limit \((\varepsilon _1, \varepsilon _2) \rightarrow (0,0)\) (Kuehn et al. 2022). It is worthy to note that multiple time-scale systems with more than two time-scales appear frequently in applications. The long-term dynamics of a forced van der Pol oscillator with three time-scales was studied as early as 1947 in Cartwright and Littlewood (1947). A theoretical basis for normally hyperbolic theory for stationary multiple time-scale systems with three or more time-scales has appeared more recently in e.g. Cardin et al. (2014), Cardin and Teixeira (2017), Kruff and Walcher (2019), Lizarraga et al. (2021). Progress has also been made in the non-normally hyperbolic setting, particularly via the study of three time-scale applications and ‘prototypical systems’ inspired by applications; we refer to De Maesschalck et al. (2014), Desroches and Kirk (2018), Jalics et al. (2010), Kaklamanos and Popović (2022), Kaklamanos et al. (2022), Kaklamanos et al. (2023), Krupa et al. (2008), Letson et al. (2017), Nan et al. (2015).
We present a detailed analysis of the ‘jump-type’ transition near a non-normally hyperbolic cycle of regular fold type using geometric blow-up. More precisely, we assume that the limiting system (2)\(_{\varepsilon _1>0, \varepsilon _2 = 0}\) undergoes a type of folded cycle bifurcation under variation in y which is common in applications with periodic forcing in the slow equation. This global bifurcation is closely related to (and can in many ways be seen as an oscillatory analogue to) the regular fold or jump point in stationary fast–slow systems, which has been studied in \({\mathbb {R}}^2\) and \({\mathbb {R}}^3\) in particular using blow-up techniques in Krupa and Szmolyan (2001a), Szmolyan and Wechselberger (2004); see also Mishchenko et al. (1975) for a detailed treatment of the planar case using classical asymptotic methods. After deriving a prototypical system by imposing a number of defining assumptions on system (2), we show that the blow-up method can be applied, even though a rigorous reduction to the stationary setting is not possible due to angular coupling. The formal division by zero which is necessary to obtain a desingularised vector field with improved hyperbolicity properties is possible if the time-scale associated to the rotation is sufficiently slow relative to the fast radial dynamics, i.e. if \(\varepsilon _1\) is sufficiently small.
The blow-up analysis allows for the detailed characterisation of the transition map induced by the flow, including the asymptotic and contractivity properties of the transition undergone by solutions traversing the neighbourhood of the global singularity. If \(\varepsilon _2 / \varepsilon _1 \sim 1\) or \(\varepsilon _2 / \varepsilon _1 \gg 1\) (so that (3) is not satisfied), then system (2) is a stationary fast–slow system. In this case, the local dynamics can (for the most part) be described in detail using the results established for two time-scale systems in Krupa and Szmolyan (2001a), Mishchenko et al. (1975), Szmolyan and Wechselberger (2004), after Taylor expansion about a given jump point. However, these results do not apply directly to the scaling regimes we consider which satisfy (3), i.e. they do not apply in the semi-oscillatory case. One important reason for this is that the singularity is ‘global’ in the angular coordinate \(\theta \). Consequently, it does not suffice to blow-up at a single point on the non-hyperbolic cycle. Rather, it is necessary to blow-up the entire non-hyperbolic cycle to a ‘torus of spheres’ \(S^1 \times S^2\). A similar approach is adopted in the geometric analysis of the periodically forced van der Pol equation in Burke et al. (2016); however, in our case, the leading-order equations derived on the blown-up sphere may depend upon the angular variable \(\theta \), which remains non-local. As a consequence, the local dynamics cannot be analysed with a straightforward adaptation of the arguments used to study the dynamics near a regular fold point/curve in Krupa and Szmolyan (2001a), Szmolyan and Wechselberger (2004). Rather, new arguments are needed. We derive results for two different scaling regimes defined by \((\varepsilon _1, \varepsilon _2) = (\varepsilon ^\alpha , \varepsilon ^3)\), where \(\alpha \in \{1,2\}\) and \(0 < \varepsilon \ll 1\). In each case, the size of the leading-order term in the asymptotics for the parameter drift in y is shown to agree with the known results for the stationary regular fold point (Krupa and Szmolyan 2001a; Szmolyan and Wechselberger 2004). In contrast to the classical fold, however, the leading-order coefficient is shown to depend on \(\theta \), and we provide an explicit formula for this dependence in the case \(\alpha = 2\). We also provide asymptotics for the angular coordinate \(\theta \) as a function of the initial conditions and small parameters, and an asymptotic estimate for the number of rotations about the y-axis over the course of the transition. The results obtained are shown to depend on the relative magnitude of \(\varepsilon _1\) and \(\varepsilon _2\) (i.e. on \(\alpha \)), with the main qualitative difference pertaining to the asymptotic estimates for \(\theta \) and the corresponding number of rotations.
Finally, we apply our results in order to derive detailed asymptotic information near folded limit cycle manifolds of periodically forced Liénard equations, and we consider a simple model proposed in Zhu et al. (2015) as a toy model for the study of tipping phenomena in climate systems. Our main results do not apply directly to the latter problem, due to periodic forcing in the fast equation. Rather, we aim to demonstrate with a partial but illustrative geometric analysis that problems of this kind can be treated using classical approaches based on established results for two time-scale systems.
The manuscript is structured as follows. In Sect. 2 we introduce defining assumptions and present the prototypical system for which our main results are stated. The singular dynamics and geometry, which differ in different scalings, are presented in Sect. 2.1. The main results are presented and described in Sect. 3, and the blow-up analysis and proof of the main results are presented in Sect. 4. The applications are treated in Sect. 5. Specifically, in Sect. 5.1 we apply our main results to periodically forced Liénard equations, and in Sect. 5.2 we consider the toy model for the study of tipping phenomena from Zhu et al. (2015) which cannot be treated directly with the results from Sect. 3. We conclude with a summary and outlook in Sect. 6.
2 Assumptions and Setting
We consider \(C^{k}\)-smooth multiple time-scale systems in the general form (2), restated here for convenience:
where \(k \in {\mathbb {N}}\) will be assumed to be ‘sufficiently large’ throughout, \((\cdot )' = \textrm{d}/\textrm{d}t\), the variables are given in cylindrical coordinates \((r,\theta ,y) \in {\mathbb {R}}_{\ge 0} \times {\mathbb {R}}/ {\mathbb {Z}} \times {\mathbb {R}}\), and \(\varepsilon _1, \varepsilon _2\) are singular perturbation parameters satisfying \(0 < \varepsilon _1, \varepsilon _2 \ll 1\). Note also that smoothness implies that f, g, h are 1-periodic in \(\theta \). System (4) evolves on either two or three time-scales, depending on whether the ratio \(\varepsilon _1 / \varepsilon _2\) is asymptotically large, constant or small. The setup and defining assumptions presented below are primarily motivated by the case \(0 < \varepsilon _2 \ll \varepsilon _1 \ll 1\), for which system (4) in a certain sense ‘intermediate’ between stationary and oscillatory fast–slow systems. We shall refer to this as the semi-oscillatory case. Since we also consider other possibilities, however, we leave the exact relation between \(\varepsilon _1\) and \(\varepsilon _2\) unspecified for now. It suffices to observe that the forward evolution of a generic initial condition is characterised by radial motion on the fast time-scale t, angular motion on a time-scale \(\tau _{\varepsilon _1} = \varepsilon _1 t\), and vertical ‘parameter drift’ on a time-scale \(\tau _{\varepsilon _2} = \varepsilon _2 t\).
In the following we impose a number of defining conditions in terms of the limiting oscillatory fast–slow system obtained in the singular limit \(\varepsilon _1 > 0, \ \varepsilon _2 \rightarrow 0\), i.e. on
We remark that the singular limit \(\varepsilon _1 > 0, \ \varepsilon _2 \rightarrow 0\) is only ‘natural’ in the semi-oscillatory case, i.e. if \(\varepsilon _1 / \varepsilon _2 \gg 1\) so that the rotation is fast relative to the parameter drift.
Assumption 1
(Existence of a limit cycle for \(\varepsilon _1 > 0, \ \varepsilon _2 \rightarrow 0\)). There exist a constant \(\varepsilon _{1,0} > 0\) and a constant \(v > 0\) such that system (5) has a circular limit cycle
More precisely, we assume that
for all \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\) and \(\varepsilon _1 \in (0, \varepsilon _{1,0})\).
Remark 2.1
The assumption that the limit cycle \(S_0^{{\text {c} }}\) is circular and in particular the zero condition on f in (6), is natural in applications with small-amplitude external periodic forcing (amplitudes of \({\mathcal {O}}(\varepsilon _2)\) or smaller). However, it rules out applications with ‘large’ periodic forcing in the fast equation for r. One reason for imposing such a restriction is that problems of the latter kind can often be treated using classical theory for two time-scale systems. This is demonstrated for a particular application in Sect. 5.2.
We shall be interested in the dynamics in a neighbourhood of \(S_0^c\). This motivates the introduction of the signed radius variable
in which case \(S_0^c = \{ ({{\tilde{r}}}, \theta , y): {{\tilde{r}}} = 0, \theta \in {\mathbb {R}}/ {\mathbb {Z}}, y = 0 \}\). We assume without loss of generality that
divide the right-hand side of system (4) by \(g({{\tilde{r}}} + v, \theta , y, \varepsilon _1, \varepsilon _2)\), i.e. we apply a time-dependent transformation satisfying \(\textrm{d}{{\tilde{t}}} = g(r,\theta ,y,\varepsilon _1,\varepsilon _2) \textrm{d}t\) (which is positive in a sufficiently small toroidal or tubular neighbourhood \({\mathcal {V}}\) of \(S_0^{{\text {c} }}\)), and rewrite the system in \(({{\tilde{r}}}, \theta , y)\)-coordinates in order to obtain
where by a slight abuse of notation the dash now denotes differentiation with respect to \({{\tilde{t}}}\), and
Remark 2.2
In the derivation of system (7) and in many of the proofs below we make use of transformations of time which are formulated in terms of differentials, e.g. \(\textrm{d}{{\tilde{t}}} = g(r,\theta ,y,\varepsilon _1,\varepsilon _2) \textrm{d}t\). Strictly speaking, such an ‘transformation’ only defines \({{\tilde{t}}}\) as a unique function of t up to an additive constant. Since we are interested in the behaviour of solutions to autonomous ODEs, which are invariant under time translation, this additive constant can be set to zero without loss of generality.
We are interested in three time-scale systems (7) which feature a regular fast–slow fold of limit cycles with respect to the partial singular limit \(\varepsilon _1 > 0, \varepsilon _2 \rightarrow 0\). Necessary and sufficient conditions for this to occur can be given in terms of the Poincaré map induced on the transversal section \(\Delta \) obtained by intersecting the toroidal/tubular neighbourhood \({\mathcal {V}} \supset S_0^{{\text {c} }}\) with the half-plane defined by \(\theta = 0\) (decreasing the size of \({\mathcal {V}}\) if necessary).
Proposition 2.3
System (7) with \(\varepsilon _1 \in (0, \varepsilon _{1,0})\) fixed and \(0 < \varepsilon _2 \ll 1\) induces a Poincaré map \(P: \Delta \rightarrow \Delta \) given by
Proof
Since
we have
The result follows after Taylor expanding about \(\varepsilon _2 = 0\). \(\square \)
The defining conditions for \(S_0^c\) to be a regular fast–slow fold of cycles are as follows:
together with
for all \(\varepsilon _1 \in (0,\varepsilon _{1,0})\). The conditions in (9)–(10) are in 1-1 correspondence with the defining conditions for a fold bifurcation in the 1D ‘layer map’ \({{\tilde{r}}} \mapsto {{\tilde{r}}} + P_{{{\tilde{r}}}}({{\tilde{r}}}, y, \varepsilon _1, 0)\) (with y as a bifurcation parameter), see e.g. Kuznetsov (2013, Ch. 4.3), except for the integral condition, which can be viewed as the analogue of the slow regularity condition on the fast–slow regular fold point in planar continuous-time systems in Krupa and Szmolyan (2001a), Kuehn (2015).
Remark 2.4
The defining conditions for a regular fast–slow fold of cycles in (9)–(10) do not depend on the specific form of the Poincaré map in (8). Nevertheless, we have chosen to state Proposition 2.3 prior to the conditions in (9)–(10) in order to clarify the interpretation of the slow regularity condition, i.e. the integral expression in (10), which is not common in the literature. This condition can be viewed as a condition on the ‘reduced map’; we refer to Jelbart and Kuehn (2023), Jelbart and Kuehn (2023) for details.
In the following, we shall actually assume stronger conditions that are sufficient but not necessary for a regular fast–slow fold of cycles, instead of those in (9)–(10). Similarly to Assumption 1, these conditions are expected to be satisfied in applications with small-amplitude external periodic forcing; see again Remark 2.1.
Assumption 2
(Sufficient conditions for \(S_0^c\) to be a regular folded cycle) The following sufficient (but not necessary) conditions for a fast–slow fold of cycles are satisfied by system (7):
together with
for all \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\) and \(\varepsilon _1 \in {(}0,\varepsilon _{1,0})\).
It is straightforward to verify that the conditions in (11)–(12) are sufficient to ensure that the Poincaré map (8) satisfies the fold conditions (9)–(10). In particular, (11)–(12) are directly analogous to the defining conditions for the (stationary) regular fold point in Krupa and Szmolyan (2001a), except that we require them to hold for \(\theta \)-dependent functions.
Assumptions 1–2 and the implicit function theorem imply that system (5) has a two-dimensional manifold of regular limit cycles
where \({\mathcal {V}} \subseteq {\mathbb {R}}_{\ge 0} \times {\mathbb {R}}/ {\mathbb {Z}} \times {\mathbb {R}}\) is the toroidal/tubular neighbourhood about \(S_0^{{\text {c} }}\) introduced above. In other words, system (7) (and by a simple computation also system (4)) is an oscillatory fast–slow system with respect to the (partial) singular limit \(\varepsilon _1 > 0, \ \varepsilon _2 \rightarrow 0\).
The combination of signs taken by the various nonzero terms in (12) determines the orientation of the bifurcation. In the following we assume without loss of generality that
which are consistent with a ‘jump-type’ orientation in forward time; see Figs. 1 and 2. Based on Assumptions 1–2 and these sign conventions, it suffices to work with the simplified system provided in the following result.
Proposition 2.5
Let Assumptions 1–2 be satisfied and assume that \(0 < \varepsilon _1, \varepsilon _2 \ll 1\). In a sufficiently small toroidal/tubular neighbourhood about \(S_0^c\), which we continue to denote by \({\mathcal {V}}\), system (7) can be written as
where the functions \(a(\theta ), b(\theta ), c(\theta )\) are positive, 1-periodic and smooth, and the higher-order terms satisfy
Proof
Consider system (7) under Assumptions 1–2. Taylor expanding about \({{\tilde{r}}} = y = \varepsilon _2 = 0\), we obtain
where \(f_1(\theta ,\varepsilon _1)\), \(f_2(\theta ,\varepsilon _1)\) and \(h_0(\theta ,\varepsilon _1)\) are smooth, 1-periodic in \(\theta \) and positive (this follows from the sign conventions in (13)). Expanding \(f_1(\theta ,\varepsilon _1)\), \(f_2(\theta ,\varepsilon _1)\) and \(h_0(\theta ,\varepsilon _1)\) about \(\varepsilon _1 = 0\) and setting
yields system (14). \(\square \)
System (14) is related to the local normal form for the regular fold point in Krupa and Szmolyan (2001a) by a simple variable rescaling if \(\varepsilon _1 = 0\), i.e. if \(\theta \) is fixed. For \(\varepsilon _1 > 0\), however, the dependence on the angular variable appears via the functions \(a(\theta )\), \(b(\theta )\), \(c(\theta )\) and the higher-order terms \({{\mathcal {R}}_r({\tilde{r}},\theta ,y,\varepsilon _1,\varepsilon _2)}\) and \({{\mathcal {R}}_y({\tilde{r}},\theta ,y,\varepsilon _1,\varepsilon _2)}\). In what follows, we drop the tilde notation on \({{\tilde{r}}}\) and work with system (14) for the remainder of this manuscript.
Remark 2.6
In Proposition 2.5 we assert that the functions \(a(\theta )\), \(b(\theta )\) and \(c(\theta )\) are ‘smooth’. A more precise statement would be to say that they are \(C^k\)-smooth, since the system obtained after Taylor expansion is precisely as smooth as the original system (7). Since we will not be interested in smoothness per se, we shall adopt a similar terminology throughout for simplicity, i.e. by ‘smooth’ we shall mean sufficiently smooth for the validity of our methods (e.g. Taylor expansions).
Remark 2.7
The equation for \({{\tilde{r}}}\) in system (14) can be further simplified after setting \({{\widehat{r}}} = \sqrt{b(\theta ) / a(\theta )} \, {{\tilde{r}}}\). This leads to
where \(a':= \partial a / \partial \theta \), \(b':= \partial b / \partial \theta \) and \(\iota (\theta ):= \sqrt{a(\theta )b(\theta )}\). The ‘price’ of this simplification, however, is that the \({\mathcal {O}}(\varepsilon _1{{{\widehat{r}}}} )\) term also appears in the leading-order terms in the blow-up analysis in later sections. For this reason, we continue to work with the formulation in (14).
Remark 2.8
If \(\varepsilon _1 \sim \varepsilon _2\) or \(\varepsilon _1 \ll \varepsilon _2\), then the \(\theta \)-variable is ‘slow enough’ to validate the Taylor expansion of system (14) about a fixed point \((0,\theta ^*,0) \in S_0^{{\text {c} }}\), i.e. in this case, one can also Taylor expand in the angular coordinate \(\theta \). This allows for a subsequent transformation into the simpler local normal form near a fold curve in Szmolyan and Wechselberger (2004, Lem. 3), thereby showing that the dynamics in these cases are governed by the well-known result for two time-scale systems in Szmolyan and Wechselberger (2004, Thm. 1). In the semi-oscillatory case of interest with \(\varepsilon _2 \ll \varepsilon _1\), however, \(\theta \) is fast relative to y and varies over the entire domain \({\mathbb {R}}/ {\mathbb {Z}}\) as solutions approach \(S_0^{{\text {c} }}\). As a consequence, one cannot Taylor expand the \(\theta \) coordinate, and transformation to the local normal form in Szmolyan and Wechselberger (2004) is not possible.
Remark 2.9
In order to sketch geometric objects like \(S_0\) in the upcoming figures, we choose the positive, 1-periodic and smooth functions \(a(\theta ) = 2 + \sin (4\pi \theta )\) and \(b(\theta ) = 5 + \cos (2\pi \theta -1)\). For constant functions a and b, the figures including the \(\theta \)-coordinate would be rotationally symmetric.
2.1 Geometry and Dynamics in the Singular Limit
We turn now to the singular geometry and dynamics of system (14). Taking the double singular limit \((\varepsilon _1, \varepsilon _2) \rightarrow (0,0)\) yields the layer problem
which has a two-dimensional critical manifold
where \(I_r {:}{=}(-r_0,r_0)\) for a small but fixed \(r_0 > 0\) and
solves the equation \(F(r,\theta ,y,0,0) = -a(\theta )y + b(\theta )r^2 + {\mathcal {R}}_r(r,\theta ,y,0,0) = 0\) locally via the implicit function theorem.
The stability of \(S_0\) with respect to the fast radial dynamics is determined by the unique non-trivial (i.e. not identically zero) eigenvalue of the linearisation, namely
It follows that the critical manifold has the structure \(S_0 = S_0^{{\text {a} }} \cup S_0^{{\text {c} }} \cup S_0^{{\text {r} }}\), where
are normally hyperbolic and attracting/repelling, respectively (assuming \(r_0 > 0\) is sufficiently small). The circular set \(S_0^{{\text {c} }} = \{(0,\theta ,0) \in S_0\}\), which corresponds to the regular folded cycle in Assumption 2, is non-normally hyperbolic. The situation is sketched in Figs. 1 and 2.

Singular geometry and dynamics in case (C1). Fast and slow dynamics are depicted (here and throughout) by double and single arrows, respectively. The attracting and repelling normally hyperbolic submanifolds of the critical manifold \(S_0\), denoted by \(S_0^{{\text {a} }}\) and \(S_0^{{\text {r} }}\), are shown in shaded turquoise and grey, respectively, and sketched for the particular choice of \(a(\theta )\) and \(b(\theta )\) defined in Remark 2.9. The non-normally hyperbolic folded cycle \(S_0^{{\text {c} }}\) is shown in blue. The reduced flow in case (C1) is periodic, i.e. y is a parameter and \(S_0\) is foliated by limit cycles of period \(\tau _{\varepsilon _1} = 1\) (Color figure online)

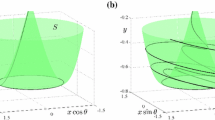
Singular geometry and dynamics in case (C3) sketched for the particular choice of \(a(\theta )\) and \(b(\theta )\) in Remark 2.9. The dynamics is distinguished from cases (C1) and (C2) by the reduced flow on \(S_0\). In this case, \(\theta \) is a parameter and singular orbits (concatenations of solution segments of layer and reduced problem) are contained within constant angle planes \(\{\theta = const.\}\). An example of such an orbit is sketched in red (Color figure online)
The dynamics and geometry for the layer problem (15) do not depend upon the relative magnitude of \(\varepsilon _1\) and \(\varepsilon _2\). The reduced dynamics on \(S_0\), however, are expected to differ significantly depending on the size of \(\varepsilon _1 / \varepsilon _2\). As noted already in Sect. 1, we consider three distinct possibilities:
-
(C1)
Angular dynamics are fast relative to the parameter drift, i.e.
$$\begin{aligned} \frac{\varepsilon _1}{\varepsilon _2} \gg 1. \end{aligned}$$ -
(C2)
Angular dynamics occur on the same time-scale as the parameter drift, i.e. there is a constant \(\sigma > 0\) such that
$$\begin{aligned} \frac{\varepsilon _1}{\varepsilon _2} = \sigma . \end{aligned}$$ -
(C3)
Angular dynamics are slow relative to the parameter drift, i.e.
$$\begin{aligned} \frac{\varepsilon _1}{\varepsilon _2} \ll 1. \end{aligned}$$
A different reduced problem is obtained on \(S_0\) in each case. We briefly consider each case in turn.
2.1.1 The Reduced Problem in Case (C1)
In this case we rewrite system (14) on the slow time-scale \(\tau _{\varepsilon _1} = \varepsilon _1 t\). This leads to
where the dot denotes differentiation with respect to the slow time \(\tau _{\varepsilon _1}\). Since \(\varepsilon _1 / \varepsilon _2 \gg 1\), we first take \(\varepsilon _2 \rightarrow 0\), and then \(\varepsilon _1 \rightarrow 0\) (in that order). This leads to the reduced problem
In this case, \(S_0\) is foliated by limit cycles of period \(\tau _{\varepsilon _1} = 1\), i.e. \(t=1/\varepsilon _1\). An expression for the vector field on \(S_0\), expressed in the \((r,\theta )\)-coordinate chart, can be obtained by differentiating the constraint \(y = \varphi _0(r,\theta )\) with respect to \(\tau _{\varepsilon _1}\) and rearranging terms. We obtain
where \(a' {:}{=}\partial a / \partial \theta \) and \(b' {:}{=}\partial b / \partial \theta \). This case is sketched in Fig. 1.
2.1.2 The Reduced Problem in Case (C2)
To obtain the reduced problem in case (C2) we may write system (14) on either time-scale \(\tau _{\varepsilon _1}\) or \(\tau _{\varepsilon _2}\), which are related via \(\tau _{\varepsilon _1} = \sigma \tau _{\varepsilon _2}\). Writing the system on the \(\tau _{\varepsilon _2}\) time-scale leads to
where this time, the dot denotes differentiation with respect to the slow time \(\tau _{\varepsilon _2}\). Taking the double singular limit and using the fact that \(\varepsilon _1 / \varepsilon _2 = \sigma \) leads to the reduced problem
In contrast to the limiting equations (17) in case (C1), none of the variables become parameters in system (19). This is natural because in case (C2), system (14) only has two (as opposed to three) time-scales. In the \((r,\theta )\)-coordinate chart, the dynamics are determined by
In particular, solutions reach \(r = 0\) (and therefore \(S_0^{{\text {c} }}\)) in finite time.
2.1.3 The Reduced Problem in Case (C3)
In this case we rewrite system (14) on the slow time-scale \(\tau _{\varepsilon _2} = \varepsilon _2 t\), thereby obtaining system (18). Since \(\varepsilon _1 / \varepsilon _2 \ll 1\), we first take \(\varepsilon _1 \rightarrow 0\), and then \(\varepsilon _2 \rightarrow 0\) (in that order). This leads to the reduced problem
This time, the angular variable \(\theta \) is the slow variable to be considered as a parameter in system (19). In particular, the dynamics on \(S_0\) can be represented by the 1-parameter family of ODEs
where \(a = a(\theta )\), \(b = b(\theta )\) and \(c = c(\theta )\) are constants paramaterised by \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\). Similarly to case (C2), solutions reach \(S_0^{{\text {c} }}\) in finite time. Moreover, singular orbits obtained as concatenations of layer and reduced orbit segments are contained within constant \(\theta \) planes. As a result, the singular geometry and dynamics in case (C3) is equivalent to the singular geometry and dynamics of the normal form for the planar regular fold point in Krupa and Szmolyan (2001a). This case is sketched in Fig. 2.

Projected geometry and dynamics in the (r, y)-plane, as described by Theorem 3.2. The critical manifold and its submanifolds are sketched in colours consistent with earlier figures for the particular choice of \(a(\theta )\) and \(b(\theta )\) defined in Remark 2.9. The entry, exit sections \(\Delta ^{{\text {in} }}\), \(\Delta ^{{\text {out} }}\) (magenta, orange) and the (extended) Fenichel slow manifolds \({S^{{\text {a} }}_{\varepsilon }}\), \({S^{{\text {r} }}_{\varepsilon }}\) are also shown as shaded regions in green and light grey, respectively. For \(S_\varepsilon ^\text {a}\) and \(S_0^\text {a}\) additionally a sample trajectory for a fixed \(\theta \) initial condition is shown (Color figure online)

The extension of the attracting slow manifold \(S^{{\text {a} }}_{\varepsilon }\) (again in shaded green) as described by Theorem 3.2, in the full \((r,\theta ,y)\)-space. The entry, exit sections \(\Delta ^{{\text {in} }}\), \(\Delta ^{{\text {out} }}\) as well as the critical manifold and its submanifolds are also shown, with the same colouring as in Fig. 3 for the particular choice of \(a(\theta )\) and \(b(\theta )\) in Remark 2.9. The intersection \({\pi ^{(\alpha )}(S_{\varepsilon }^{{\text {a} }}} \cap \Delta ^{{\text {in} }}) \subset \Delta ^{{\text {out} }}\) is topologically equivalent to a circle (shown in dark green), and \(O(\varepsilon ^2)\)-close to the plane \(\{y = 0\}\) in the Hausdorff distance. The specific behaviour of solutions, which depends on \(\alpha \), is not shown (see however Figs. 5, 6, 7 and 8) (Color figure online)
For \(0 < \varepsilon _1, \varepsilon _2 \ll 1\), Fenichel–Tikhonov theory implies that compact submanifolds of the normally hyperbolic critical manifolds \(S_0^{{\text {a} }}\) and \(S_0^{{\text {r} }}\) persist as \({\mathcal {O}}(l(\varepsilon _1,\varepsilon _2))\)-close locally invariant slow manifolds \(S_{l(\varepsilon _1,\varepsilon _2)}^{{\text {a} }}\) and \(S_{l(\varepsilon _1,\varepsilon _2)}^{{\text {r} }}\), respectively (Fenichel 1979; Jones 1995; Kuehn 2015; Wechselberger 2020; Wiggins 1994), where we write \(l(\varepsilon _1,\varepsilon _2) {:}{=}\max \{ \varepsilon _1, \varepsilon _2 \}\) in order to keep the discussion general, i.e. so that we need not distinguish between cases (C1), (C2) and (C3). Our goal is to describe the extension of the attracting slow manifold \(S_{l(\varepsilon _1,\varepsilon _2)}^{{\text {a} }}\) through a neighbourhood of the non-hyperbolic cycle \(S_0^{{\text {c} }}\) corresponding to the regular folded cycle in system (14).
Remark 2.10
In Cardin and Teixeira (2017), the authors extend GSPT for a class of multiple time-scale systems with \(n \ge 3\) time-scales which feature ‘nested critical manifolds’. A requirement for the application of this theory to system (14) is that the reduced problem on \(S_0\) has a one-dimensional critical manifold. This condition is not satisfied in any case (C1), (C2) or (C3) because none of the reduced problems (17), (19) and (21) have equilibria in the neighbourhood of interest (i.e. close to \(r = y = 0\)).
3 Main Results
We now state and describe our main results. In order to distinguish the different cases (C1), (C2) and (C3), we scale \(\varepsilon _1\) and \(\varepsilon _2\) by a single small parameter \(0<\varepsilon \ll 1\). Main results are stated and proved for system (14) with \(\varepsilon _1 = \varepsilon ^\alpha \) and \(\varepsilon _2 = \varepsilon ^3\), i.e. for the system
where the functions \(a(\theta ), b(\theta ), c(\theta )\) are positive, 1-periodic and smooth and the higher-order terms satisfy
The different cases (C1), (C2) and (C3) are obtained for different values of the scaling parameter \(\alpha \in {\mathbb {N}}_+\) as follows:
-
Case (C1)\(^*\): \(\alpha = 1\);
-
Case (C1): \(\alpha = 2\);
-
Case (C2): \(\alpha = 3\);
-
Case (C3): \(\alpha \ge 4\).
Note that we have introduced an additional case (C1)\(^*\). This case is dynamically distinct from the others, but it is not distinguished in Sect. 2 because the geometry and dynamics in the double singular limit are the same as for case (C1).
Remark 3.1
The choice to write \(\varepsilon ^3\) instead of \(\varepsilon \) in the equation for y is made a-posteriori in order to avoid fractional exponents in the proofs. Comparisons with known results for the stationary regular fold point in Krupa and Szmolyan (2001a), Szmolyan and Wechselberger (2004) are possible via the simple relation \(\varepsilon _{{\text {KSW} }} = \varepsilon ^3\), where we denote by \(\varepsilon _{{\text {KSW} }}\) the small parameter in Krupa and Szmolyan (2001a) and/or Szmolyan and Wechselberger (2004). Similar observations motivated the use of a cubic exponent for the small parameter in other works involving folded singularities, e.g. in Nipp and Stoffer (2013), Nipp et al. (2009).

Case (C1)\(^*\). Sketch of the flow of system (22) for \(\alpha =1\). The solution sketched in red makes \({N^{(1)}_{\text {rot} }(r,\theta ,\varepsilon )} = \lfloor {\mathcal {O}}(\varepsilon ^{-2}) \rfloor \) rotations about the y-axis before leaving the neighbourhood close to \(S_\varepsilon ^{{\text {a} }} \cap \Delta ^{{\text {out} }}\) at an angle approximated by the expression for \({h_\theta ^{(1)}(r,\theta ,\varepsilon )}\) in Theorem 3.2 Assertion (b) (Color figure online)

Case (C1). Sketch of the flow of system (22) for \(\alpha = 2\). The solution sketched in red makes \({N_{\text {rot} }^{(2)}(r,\theta ,\varepsilon )} = \lfloor {\mathcal {O}}(\varepsilon ^{{-1}}) \rfloor \) rotations about the y-axis before leaving the neighbourhood close to \(S_\varepsilon ^{{\text {a} }} \cap \Delta ^{{\text {out} }}\) at an angle approximated by the expression for \({h_\theta ^{(2)}}(r,\theta ,\varepsilon )\) in Theorem 3.2 Assertion (b) (Color figure online)
Our aim is to describe the forward evolution of initial conditions in an annular entry section
where R is a small positive constant and \(\beta _-< \beta _+ < 0\) are two negative constants chosen such that \(S_0^{{\text {a} }} \cap \Delta ^{{\text {in} }} \subset \Delta ^{{\text {in} }} \cap \{ r \in (\beta _-, \beta _+) \}\). We track solutions of system (22) up to their intersection with the cylindrical exit section
for a small positive constant \(y_0 > 0\). The critical manifold \(S_0\), the Fenichel slow manifolds (denoted now by \(S_\varepsilon ^{{\text {a} }}\) and \(S_\varepsilon ^{{\text {r} }}\)) and the entry/exit sections are visualised in the (r, y)-plane in Fig. 3 and in the three-dimensional space in Fig. 4.

Case (C2). Sketch of the flow of system (22) for \( \alpha =3\). The solution sketched in red makes \(N_{\text {rot} }^{(3)}(r,\theta ,\varepsilon ) = \lfloor \frac{b(\theta )}{a(\theta ) c(\theta )} R + {\mathcal {O}}(R^2) + {\mathcal {O}}(\varepsilon ^3 \ln \varepsilon ) \rfloor \) rotations about the y-axis before leaving the neighbourhood close to \(S_\varepsilon ^{{\text {a} }} \cap \Delta ^{{\text {out} }}\) at an angle approximated by the expression for \({h_\theta ^{(3)}}(r,\theta ,\varepsilon )\) in Theorem 3.2 Assertion (b) (Color figure online)
We now state the main result, which characterises the dynamics of the map \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) induced by the flow of system (22) for each \(\alpha \in {\mathbb {N}}_+\), i.e. in all four cases (C1)\(^*\), (C1), (C2) and (C3).

Case (C3). Sketch of the flow of system (22). The solution sketched in red makes \(N_{\text {rot} }^{(\alpha )}(r,\theta ,\varepsilon ) = 0\) rotations about the y-axis before leaving the neighbourhood close to \(S_\varepsilon ^{{\text {a} }} \cap \Delta ^{{\text {out} }}\) at an angle approximated by the expression for \({h_\theta ^{(\alpha )}(r,\theta ,\varepsilon )}\) in Theorem 3.2 Assertion (b) (\(\alpha \ge 4\)) (Color figure online)
Theorem 3.2
Consider system (22) with fixed \(\alpha \in {\mathbb {N}}_+\). There exists an \(\varepsilon _0 > 0\) such that for all \(\varepsilon \in (0, \varepsilon _0]\), the map \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) is well-defined with the following properties:
-
(a)
(Extension of \(S_\varepsilon ^{{\text {a} }}\)). There exists a function \(h_y^{(\alpha )}: {\mathbb {R}}/ {\mathbb {Z}} \times (0,\varepsilon _0{]} \rightarrow {\mathbb {R}}\) which is smooth and 1-periodic in \(\theta \) such that \(\pi ^{(\alpha )}(S_\varepsilon ^{{\text {a} }} \cap \Delta ^{{\text {in} }}) = \{ (R, \theta , h_{y}^{(\alpha )}(\theta ,\varepsilon )): \theta \in {\mathbb {R}}/ {\mathbb {Z}} \}\) is a smooth, closed curve.
-
(b)
(Asymptotics). \(\pi ^{(\alpha )}\) has the form
$$\begin{aligned} \pi ^{(\alpha )}: (r, \theta , R^2) \mapsto \left( R, h_\theta ^{(\alpha )}(r,\theta ,\varepsilon ), h_y^{(\alpha )}(h_\theta ^{(\alpha )}(r,\theta ,\varepsilon ),\varepsilon ) + h_{\text {rem} }^{(\alpha )}(r,\theta ,\varepsilon ) \right) , \end{aligned}$$where
$$\begin{aligned} h_y^{(\alpha )}(h_\theta ^{(\alpha )}(r,\theta ,\varepsilon ),\varepsilon ) = {\mathcal {O}}(\varepsilon ^2), \qquad h_{\text {rem} }^{(\alpha )}(r,\theta ,\varepsilon ) = {\mathcal {O}}\left( \textrm{e}^{-\kappa / \varepsilon ^3} \right) , \end{aligned}$$and \(\kappa > 0\) is a constant. In particular we have that \(h_{\theta }(r,\theta ,\varepsilon ) = {{\tilde{h}}}_{\theta }(r,\theta ,\varepsilon ) \mod 1\), where
$$\begin{aligned} {{\tilde{h}}}_{\theta }^{(\alpha )}(r,\theta ,\varepsilon ) = {\left\{ \begin{array}{ll} {\theta + \frac{R^2}{c_0} \varepsilon ^{-2} + {\mathcal {O}}( \ln \varepsilon ), } &{} \alpha = 1, \\ {\theta + \frac{R^2}{c_0} \varepsilon ^{-1} + {\mathcal {O}}(\varepsilon \ln \varepsilon ), } &{} \alpha = 2, \\ \psi (\theta ) + {\mathcal {O}}(\varepsilon ^3 \ln \varepsilon ), &{} \alpha = 3, \\ \theta + {\mathcal {O}}(\varepsilon ^3 \ln \varepsilon ), &{} \alpha \ge 4, \end{array}\right. } \end{aligned}$$(25)and
$$\begin{aligned} h_y^{(\alpha )}({\tilde{\theta }},\varepsilon ) = {\left\{ \begin{array}{ll} {\mathcal {O}}(\varepsilon ^2), &{} \alpha = 1, \\ - \left( \frac{c({\tilde{\theta }})^2}{a({\tilde{\theta }}) b({\tilde{\theta }})} \right) ^{1/3} \Omega _0 \varepsilon ^2 + {\mathcal {O}}(\varepsilon ^3 \ln \varepsilon ), &{} \alpha \ge 2. \end{array}\right. } \end{aligned}$$(26)Here \(c_0 {:}{=}\int _0^1 c(\theta ) \, \textrm{d}\theta > 0\) is the mean value of c over a single period, \(\psi (\theta ) = \theta + \frac{b(\theta )}{a(\theta ) c(\theta )} R^2 + {\mathcal {O}}(R^3)\) is induced by the reduced flow of system (20) with \(\sigma = 1\) up to \(r = 0\), and the constant \(\Omega _0 > 0\) is the smallest positive zero of \(J_{-1/3} ( 2z^{3/2} /3 ) + J_{1/3}( 2z^{3/2} / 3)\) where \(J_{\pm 1/3}\) are Bessel functions of the first kind.
-
(c)
(Strong contraction). The y-component of \(\pi ^{(\alpha )}(r,\theta ,R^2)\) is a strong contraction with respect to r. More precisely,
$$\begin{aligned} {\frac{\partial }{\partial r} \left( h_y^{(\alpha )}(h_\theta ^{(\alpha )}(r,\theta ,\varepsilon ),\varepsilon ) + h_{\text {rem} }^{(\alpha )}(r,\theta ,\varepsilon ) \right) = {\mathcal {O}} \left( \textrm{e}^{-\kappa / \varepsilon ^3} \right) .} \end{aligned}$$
Theorem 3.2 characterises the asymptotic behaviour of solutions and the extension of the attracting Fenichel slow manifold \(S_\varepsilon ^{{\text {a} }}\) through a neighbourhood of the regular folded cycle in system (22). The geometry and dynamics for all four cases (C1)\(^*\), (C1), (C2) and (C3) are sketched in Figs. 5, 6, 7 and 8, respectively. The proof is broken into two parts, depending on whether or not \(\alpha \in \{1,2\}\). A detailed proof based on the blow-up method will be given for the cases \(\alpha \in \{1,2\}\) in Sect. 4. Recall that these are the primary cases of interest, since they correspond to semi-oscillatory dynamics. If \(\alpha \ge 3\), minor adaptations of the proof for case \(\alpha = 2\) can be applied. Moreover, in this case, one can show directly that \(S_0^{{\text {c} }}\) is a closed regular fold curve. From here, Assertions (a)–(c) can be proven directly using established results (or a straightforward adaptation thereof) on the passage past a fold curve in 2-fast 1-slow systems, specifically (Szmolyan and Wechselberger 2004, Thm. 1). We shall therefore omit the details of these cases. Note that for \(\alpha \ge 4\) in particular, \(h_\theta ^{(\alpha )}(r, \theta , \varepsilon ) \sim \theta \) as \(\varepsilon \rightarrow 0\), which implies that the leading-order coefficient in the expansion for \(h_y^{(\alpha )}(\theta ,\varepsilon )\) is also constant in \(\theta \). This is expected, since the dynamics for \(\alpha \ge 4\) should resemble the dynamics of the stationary fold point considered in Krupa and Szmolyan (2001a) up to a slight perturbation.
For each \(\alpha \in {\mathbb {N}}_+\), the size of the leading-order term in the asymptotics for the parameter drift in y is also the same as for the stationary regular fold point, at least up to \({\mathcal {O}}(\varepsilon ^3 \ln \varepsilon )\), since
which agrees with the asymptotic estimates in Krupa and Szmolyan (2001a), Mishchenko et al. (1975), Szmolyan and Wechselberger (2004) (recall from Remark 3.1 that \(\varepsilon _{{\text {KSW} }} = \varepsilon ^3\), where \(\varepsilon _{{\text {KSW} }}\) denotes the small parameter in Krupa and Szmolyan (2001a), Szmolyan and Wechselberger (2004)). The strong contraction property in Assertion (c), which does not depend on \(\alpha \), is also the same. These two facts explain the similarity between the dynamics observed in the (r, y)-plane and the dynamics near a stationary regular fold point; c.f. Fig. 3 and Krupa and Szmolyan (2001a, Fig. 2.1). In contrast to the stationary fold, however, the coefficients of \(h_y^{(\alpha )}(\theta ,\varepsilon )\) depend on \(\theta \), and (26) gives the precise form for the leading-order coefficient if \(\alpha > 1\), i.e. if \(\alpha \in {\mathbb {N}}_+ {\setminus } \{1\}\). Moreover, Theorem (3.2) provides detailed asymptotic information about the angular coordinate \(\theta \) via (25). If \(\alpha > 2\) then estimates are sharp as \(\varepsilon \rightarrow 0\).
Finally, the dynamics in different cases, i.e. for differing values of \(\alpha \), are distinguished via the angular dynamics and in particular, the number of complete rotations about the y-axis during the transition from \(\Delta ^{{\text {in} }}\) to \(\Delta ^{{\text {out} }}\). We can estimate this number by introducing the function \(N_{{\text {rot} }}^{(\alpha )}: [\beta _-, \beta _+] \times {\mathbb {R}}/ {\mathbb {Z}} \times (0, \varepsilon _0] \rightarrow {\mathbb {N}}\) via
We obtain the following corollary as an immediate consequence of Theorem 3.2.
Corollary 3.3
Let \(\gamma : {\mathbb {R}} \rightarrow {\mathbb {R}}_{\ge 0} \times {\mathbb {R}}/{\mathbb {Z}} \times {\mathbb {R}} \) be a solution of system (22) with initial condition \(\gamma (0) = (r,\theta ,R) \in \Delta ^{{\text {in} }}\). Then \(\gamma (t)\) undergoes
complete rotations about the y-axis during its passage to \(\Delta ^{{\text {out} }}\).
Proof
This follows immediately from the asymptotic estimates for \({{\tilde{h}}}^{(\alpha )}(r,\theta ,\varepsilon )\) in Theorem 3.2 and the definition of \(N_{{\text {rot} }}^{(\alpha )}\). \(\square \)
4 Proof of Theorem 3.2
Our aim is to investigate the three time-scale system (22) with \(\alpha \in \{1,2\}\) using the blow-up method developed for fast–slow systems in Dumortier and Roussarie (1996), Krupa and Szmolyan (2001a), Krupa and Szmolyan (2001b), Krupa and Szmolyan (2001c); we refer again to Jardón-Kojakhmetov and Kuehn (2021) for a recent survey. Many aspects of the proof rely in particular on arguments used in the blow-up analysis of the (stationary) regular fold point in Krupa and Szmolyan (2001a). However, many of the calculations are complicated by the fact that the angular variable \(\theta \) cannot be treated locally. In particular, for \(\alpha \in \{1,2\}\), we cannot simply Taylor expand the equations about a fixed value of \(\theta \). Consequently, a local transformation into the local normal form in Szmolyan and Wechselberger (2004) is not possible. A similar feature arises when blowing up the fold cycle in the periodically forced van der Pol equation in the ‘intermediate frequency regime’ (Burke et al. 2016), except that in our case, there is no decoupling of the angular dynamics in the leading order. We adopt the (now well-established) notational conventions introduced in Krupa and Szmolyan (2001a), Krupa and Szmolyan (2001b), Krupa and Szmolyan (2001c).
The blow-up transformation is defined in Sect. 4.1, as are the three local coordinate charts that we use for calculations. The geometry and dynamics in all three coordinate charts are considered in turn in Sects. 4.2, 4.3 and 4.4. Theorem 3.2 is proved in Sect. 4.5 using the information obtained in local coordinate charts.
4.1 Blow-Up and Local Coordinate Charts
As is standard in blow-up approaches, we consider the extended system obtained from (22) after appending the trivial equation \(\varepsilon ' = 0\), i.e.
where \(\alpha \in \{1,2\}\) is fixed, \(\widetilde{{\mathcal {R}}}_r(r,\theta ,y,\varepsilon ) = {\mathcal {O}}(r^3,y^2,ry, \varepsilon ^\alpha r^2, \varepsilon ^\alpha y, \varepsilon ^3)\) and \(\widetilde{{\mathcal {R}}}_y(r,\theta ,y,\varepsilon ) = {\mathcal {O}}(r,y,\varepsilon ^\alpha )\).
In order to describe the map \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\), we introduce extended entry and exit sections
and
respectively. The entry, exit sections \(\Delta ^{{\text {in} }}\), \(\Delta ^{{\text {out} }}\) defined in Sect. 3 (recall Eqs. (23) and (24)) can be viewed as constant \(\varepsilon \) sections of \(\Delta ^{{\text {in} }}_\varepsilon \), \(\Delta ^{{\text {out} }}_\varepsilon \), respectively. Based on this simple relationship, we study the map \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) described in Theorem 3.2 via the extended map \(\pi ^{(\alpha )}_\varepsilon : \Delta _\varepsilon ^{{\text {in} }} \rightarrow \Delta _\varepsilon ^{{\text {out} }}\) induced by the flow of initial conditions in \(\Delta _\varepsilon ^{{\text {in} }}\) up to \(\Delta _\varepsilon ^{{\text {out} }}\) under system (27).
We now define the relevant blow-up transformation. Let \(I = [0,{\rho _0}]\), where \(\rho _0 > 0\) is fixed small enough for the validity of local computations, let
and define the (weighted) blow-up transformation via
where \(({\bar{r}},{\bar{y}},{\bar{\varepsilon }}) \in S^2\). The blow-up map \(\varphi \) is a diffeomorphism for \(\rho \in (0,{\rho _0}]\), but not for \(\rho = 0\). In particular, the preimage of the non-hyperbolic cycle \(S_0^{{\text {c} }}\) under \(\varphi \) is a ‘torus of spheres’ \(S^2 \times {\mathbb {R}}/ {\mathbb {Z}} \times \{0\} \cong S^2 \times S^1\).
For calculational purposes, we introduce local coordinate charts in order to describe the dynamics on
Following Krupa and Szmolyan (2001a), we introduce affine projective coordinates via
Here we permit a small abuse of notation by introducing a new variable \(\varepsilon _1\), which should not be confused with the small parameter with the same notation in Sects. 1–2. This leads to the following coordinates:
In the analysis, it will be necessary to change coordinates between different charts. The following lemma provides the relevant change of coordinates formulae.
Lemma 4.1
The change of coordinate maps \(\kappa _{ij}\) from \(K_i\) to \(K_j\) are diffeomorphisms given by
Proof
This follows from the local coordinate expressions in (31). \(\square \)
Remark 4.2
The blow-up transformation (30) has the same form as the blow-up map used to study dynamics near a regular fold curve in \({\mathbb {R}}^3\) in Szmolyan and Wechselberger (2004), except that the domain of the uncoupled variable \(\theta \) is \({\mathbb {R}}/ {\mathbb {Z}}\) instead of \({\mathbb {R}}\). Note also that since \(\theta \) is unaffected by (30), it follows that \(\varphi \) can be defined more succinctly in terms of its action on the remaining variables, i.e. via the map
which is precisely the blow-up map used to study the regular fold point in Krupa and Szmolyan (2001a) (recall that \(\varepsilon _{{\text {KSW} }} = \varepsilon ^3\) by the discussion following the statement of Theorem 3.2).
Remark 4.3
By construction, the blown-up vector field induced by the pushforward of the vector field induced by system (27) under \(\varphi \) is invariant in the hyperplanes \(\{\rho = 0\}\) and \(\{{{\bar{\varepsilon }}} = 0\}\). The former corresponds to blown-up preimage of the non-hyperbolic cycle \(S^{{\text {c} }}_0\), i.e. the torus of spheres \(S^2 \times S^1\). The latter contains the blown-up preimage of the critical manifold \(S_0\). Since \({{\bar{r}}}^2 + {{\bar{y}}}^2 = 1\) in \(\{{{\bar{\varepsilon }}} = 0\}\), the preimage of \(\varphi \) in \(\{{{\bar{\varepsilon }}} = 0\}\) is \(S^1 \times {\mathbb {R}}/ {\mathbb {Z}} \times {\mathbb {R}}_{\ge 0} \cong S^1 \times S^1 \times {\mathbb {R}}_{\ge 0}\). Thus, the part of the blown-up singular cycle \(S_0^{{\text {c} }}\) within \(\{{{\bar{\varepsilon }}} = 0\}\) is a torus.
Remark 4.4
Since \(\varepsilon = const.\) in system (27) we have constants of the motion defined by \(\varepsilon = \rho _1 \varepsilon _1\), \(\varepsilon = \rho _2\), \(\varepsilon = \rho _3 \varepsilon _3\) in charts \(K_1\), \(K_2\), \(K_3\), respectively.
We turn now to the dynamics in charts \(K_i\), \(i=1,2,3\).
4.2 Dynamics in the Entry Chart \(K_1\)
In chart \(K_1\) we analyse solutions which track the blown-up preimage of the attracting Fenichel slow manifold \(S_\varepsilon ^{{\text {a} }}\) as they enter a neighbourhood of the non-hyperbolic circle \(S_0^{{\text {c} }}\).
Lemma 4.5
Following the positive transformation of time \(\rho _1 \textrm{d}t = \textrm{d}t_1\), the desingularised equations in chart \(K_1\) are given by
where by a slight abuse of notation we now write \((\cdot )' = \textrm{d}/ \textrm{d}t_1\).
Proof
This follows after direct differentiation of the local coordinate expressions in (31) and subsequent application of the desingularisation \(\rho _1 \textrm{d}t = \textrm{d}t_1\). \(\square \)
The analysis in chart \(K_1\) is restricted to the set
where R is the constant which defines the entry set \(\Delta ^{{\text {in} }}\) in (23) and \(E = \varepsilon _0 / R>0\) due to the relationship \(\varepsilon = \rho _1 \varepsilon _1\) (recall Remark 4.4). The set \({\mathcal {D}}_1\) is sketched with other geometric and dynamical objects in chart \(K_1\) in Fig. 9.
System (33) is well-defined within \(\{\rho _1 = 0\}\) (recall that \(\alpha \in \{1,2\}\)), which corresponds to the part of the blow-up surface in \(K_1\). The subspace \(\{\varepsilon _1 = 0\}\) is also invariant and contains two two-dimensional critical manifolds
The manifolds \(S_1^{{\text {a} }}\) and \(S_1^{{\text {r} }}\) correspond to the blown-up preimages of the critical manifolds \(S_0^{{\text {a} }}\) and \(S_0^{{\text {r} }}\) in chart \(K_1\), respectively. Both \(S_1^{{\text {a} }}\) and \(S_1^{{\text {r} }}\) are topologically equivalent to cylindrical segments, and they are normally hyperbolic and attracting resp. repelling up to and including the sets
which intersect with the blow-up surface; see Figs. 9 and 10. The linearisation of system (33) along \(P_{{\text {a} }}\) is
where we write \(a' = \partial a / \partial \theta _1\) and \(b' = \partial b / \partial \theta _1\), and we write
In both cases, the set \(P_{{\text {a} }}\) is partially hyperbolic with a single non-trivial eigenvalue \(-2 \sqrt{a(\theta _1) b(\theta _1)} < 0\). The remaining three eigenvalues along \(P_{{\text {a} }}\) are identically zero. Thus in the blown-up space (i.e. for system (33)), we have regained partial hyperbolicity. This allows us to extend the attracting centre manifold with base along \(S_1^{{\text {a} }}\) up onto the blow-up surface using centre manifold theory.

Geometry and dynamics within \({\mathcal {D}}_1\), shown in \((r_1,\rho _1,\varepsilon _1)\)-space. Projections of the two-dimensional attracting and repelling critical manifolds \(S_1^{{\text {a} }} , S_1^{{\text {r} }} \subset \{\varepsilon _1 = 0\}\) (shown in blue and shaded blue) extend up to their intersection with the blow-up surface at \(P_{\text {a} } , P_{\text {r} } \subset \{\rho _1 = \varepsilon _1 = 0\}\), respectively. Projections of the two-dimensional centre manifolds \(N_1^{{\text {a} }}, N_1^{{\text {r} }} \subset \{\rho _1 = 0\}\) emanating from \(P_{\text {a} }, P_{\text {r} }\), as described in Lemma 4.6, are sketched in red and shaded red for the case \(\alpha = 2\), but they look similar in the case \(\alpha = 1\). Entry and exit sections \(\Sigma _1^{{\text {in} }}\) and \(\Sigma _1^{{\text {out} }}\) are shown in shaded magenta and yellow, respectively. The projected three-dimensional centre manifold \(M_1^{{\text {a} }}\) and its image under \({\Pi _1^{(\alpha )}}\) is described by Proposition 4.9. This is shown along with the image \({\Pi _1^{(\alpha )}}(\Sigma _1^{{\text {in} }}) \subset \Sigma _1^{{\text {out} }}\) in green (Color figure online)
Lemma 4.6
Consider system (33) on \({\mathcal {D}}_1\) with \(E,R>0\) sufficiently small. There exists a three-dimensional centre-stable manifold \(M_1^{{\text {a} }}\) such that
where \(S_1^{{\text {a} }} \subset \{ \varepsilon _1 = 0 \}\) is the two-dimensional attracting critical manifold in (34) and \(N_1^{{\text {a} }} \subset \{ \rho _1 = 0\}\) is a unique two-dimensional centre-stable manifold for the restricted system (33) \(|_{\rho _1=0}\) emanating from \(P_{{\text {a} }}\). The manifold \(M_1^{{\text {a} }}\) is given locally as a graph \(r_1 = h^{(\alpha )}_{r_1}(\theta _1,\rho _1,\varepsilon _1)\), where
and
In both cases, there exists a constant \(\varrho \in (0,\vartheta )\), where \(\vartheta {:}{=}\min _{\theta _1 \in [0,1)} 2 \sqrt{a(\theta _1) b(\theta _1)} > 0\), such that initial conditions in \(\Sigma ^{{\text {in} }}_1\) are attracted to \(M_1^{{\text {a} }}\) along one-dimensional stable fibers faster than \(\textrm{e}^{-\varrho t_1}\).
Proof
The existence of a three-dimensional centre manifold \(M_1^{{\text {a} }}\) follows from linearisation (35) and centre manifold theory (Kuznetsov 2013). The fact that \(M_1^{{\text {a} }}\) contains two-dimensional manifolds \(N_1^{{\text {a} }}\) and \(S_1^{{\text {a} }}\) with the properties described follows after direct restriction to the invariant hyperplanes \(\{\rho _1 = 0\}\) and \(\{\varepsilon _1 = 0\}\), respectively.
The graph representations in (36) and (37) are obtained using the standard approach based on formal matching. More precisely, we substitute a power series ansatz of the form
into the equation for \(r_1'\) in system (33) and determine the coefficients \(\mu _n^{(\alpha )}(\theta _1)\) by comparing
with
Depending on whether \(\alpha = 1\) or \(\alpha = 2\), the approximations in (36) or (37) are obtained (respectively). The details are omitted for brevity.
The strong contraction along stable fibers at a rate greater than \(\textrm{e}^{- \varrho t_1}\) for some \(\varrho \in (0,\vartheta )\), where \(\vartheta {:}{=}\min _{\theta _1 \in [0,1)} 2 \sqrt{a(\theta _1) b(\theta _1)} > 0\) follows from Fenichel theory (Fenichel 1979, Theorem 9.1) and the fact that the stable leading eigenvalue is \(\lambda = -2 \sqrt{a(\theta _1) b(\theta _1)}\), recall (35). \(\square \)
The two-dimensional centre manifold \(N_1^{{\text {a} }}\) is sketched within \(\{\rho _1 = 0\}\) in Fig. 11.
Remark 4.7
Similar to Lemma 4.6, there exists a three-dimensional centre-unstable manifold \(M_1^{{\text {r} }}\) at \(P_{{\text {r} }}\) that contains the repelling critical manifold \(S_1^{{\text {r} }} \subset \{ \varepsilon _1 = 0\}\) and a repelling centre manifold \(N_1^{{\text {r} }} \subset \{ \rho _1 = 0\}\). These objects are shown in Figs. 10 and 11. In \({\mathcal {D}}_1\), the manifold \(M_1^{{\text {r} }}\) is given as a graph \(r_1 = {\tilde{h}}^{(\alpha )}_{r_1}(\theta _1,\rho _1,\varepsilon _1)\), where
and
In contrast to \(N_1^{{\text {a} }}\), the manifold \(N_1^{{\text {r} }}\) is not unique. We omit the explicit treatment of the dynamics near \(M_1^{{\text {r} }}\) since it is not relevant to the proof of Theorem 3.2.

Geometry and dynamics within the invariant hyperplane \(\{\varepsilon _1 = 0\}\), projected into \((r_1,\theta _1,\rho _1)\)-space; c.f. Fig. 9 (Color figure online)

Lemma 4.6 can be used to describe the \(r_1\)-component of the map \(\Pi ^{(\alpha )}_1: \Sigma _1^{{\text {in} }} \rightarrow \Sigma _1^{{\text {out} }}\) induced by the flow of initial conditions in
i.e. the representation of the entry section \(\Delta ^{{\text {in} }}_\varepsilon \) defined in (28) in \(K_1\) coordinates, up to the exit section
The constants \(\beta _-<\beta _+<0\) are chosen in such a way that the \(r_1\)-coordinate of the centre manifold \(M_1^\text {a}\) in \({\mathcal {D}}_1\) is always contained in the interval \((\beta _-/R, \beta _+/R)\), cf. Definition (23) of the entry section \(\Delta ^\text {in}\).
The remaining \(\theta _1\), \(\rho _1\) and \(\varepsilon _1\) components of the map \(\Pi ^{(\alpha )}_1\) and the transition time taken for solutions with initial conditions in \(\Sigma _1^{{\text {in} }}\) to reach \(\Sigma _1^{{\text {out} }}\) can be estimated directly. To obtain better estimates, we rewrite the positive, 1-periodic smooth function \(c(\theta _1)\) as
where \(c_0 {:}{=}\int _0^1 c(\theta _1(t_1)) \, \textrm{d}t_1\) is the mean value of \(c(\theta _1)\) over one period and \(c_{\text {rem} }(\theta _1) {:}{=}c(\theta _1)-c_0\) is the smooth, 1-periodic remainder with mean zero. The estimates are provided by the following result.
Lemma 4.8
Consider an initial condition \((r_1, \theta _1, \rho _1, \varepsilon _1)(0) = (r_1^*, \theta _1^*, R, \varepsilon _1^*) \in \Sigma _1^{{\text {in} }}\) for system (33). Then
where \(\phi (t_1) {:}{=}\int _0^{t_1} c(\theta _1(s_1)) \, \textrm{d}s_1 = c_0 t_1 + {\mathcal {O}}(1)\). The notation \({\mathcal {O}}(R)\) is used to denote (possibly different) remainder terms which satisfy \(|{\mathcal {O}}(R)| \le C R\) for some constant \(C > 0\) and all \(t_1 \in [0,T_1]\), where
is the transition time taken for the solution to reach \(\Sigma _1^{{\text {out} }}\).
Proof
Consider system (33). By keeping track of the higher-order terms when deriving the equation for \(\varepsilon _1'\) in system (33) one can show that
where \(\chi (r_1,\theta _1,\rho _1,\varepsilon _1) {:}{=}\rho _1^{-1} \widetilde{{\mathcal {R}}}_y(\rho _1 r_1, \theta _1, \rho _1^2, \rho _1 \varepsilon _1) = {\mathcal {O}}(r_1,\rho _1{,\varepsilon _1})\). Directly integrating and rearranging a little leads to
where \(\phi (t_1)\) is defined as in the statement of the lemma and
The expression for \(\rho _1(t_1)\) can be obtained directly from the expression for \(\varepsilon _1(t_1)\) using the fact that \(\rho _1(t) \varepsilon _1(t) = \varepsilon = R\varepsilon _1^*\) is a constant of the motion; recall Remark 4.4. One can show that \(|\psi (t_1)| = {\mathcal {O}}(R)\) by appealing to the fact that \(\chi (r_1(s_1),\theta _1(s_1),\rho _1(s_1),\varepsilon _1(s_1))\) is bounded uniformly for all \(s_1 \in [0,T_1]\), since \(\rho _1 \in [0,R]\), \(\varepsilon _1 \in [0,E]\), \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\) and \(r_1 \in [\beta _-/R, \beta _+/R]\) (the latter follows from the fact that \(r_1'|_{r_1 = \beta _-/R} > 0\) and \(r_1'|_{r_1= \beta _+/R} < 0\)). Therefore, there is a constant \(C>0\) such that \(|\psi (t_1)| \le C R\) for all \(t_1 \in [0,T_1]\), as required.
It remains to estimate \(\theta _1(t_1)\) and the transition time \(T_1\). We have that
The expression for \(\theta _1(t_1)\) is obtained by integrating the expression for \(\varepsilon _1(t_1)\) and using (38) to estimate
as \(\int _0^1 c_{\text {rem} }(\theta _1(t_1)) \, \textrm{d}t_1 = 0\) and \(\theta _1\) is bounded and 1-periodic. To estimate the transition time \(T_1\), the boundary constraint \(\varepsilon _1(T_1) = E\) is used; c.f. (Krupa and Szmolyan 2001a, Lemma 2.7). Integrating \(\varepsilon _1' = \frac{1}{2}\varepsilon _1^4 (c_0 + c_{\text {rem} }(\theta _1) + {\mathcal {O}}(\rho _1))\) from \(\varepsilon _1^*\) to E leads to
By (38), the second term on the right-hand side is \({\mathcal {O}}(1)\) and the third term can be estimated by \(T_1 {\mathcal {O}}(R)\). Rearranging yields the desired result. \(\square \)
Combining Lemmas 4.6 and 4.8 we obtain the following characterisation of the transition map \(\Pi ^{(\alpha )}_1: \Sigma _1^{{\text {in} }} \rightarrow \Sigma _1^{{\text {out} }}\), which summarises the dynamics in chart \(K_1\).
Proposition 4.9
Fix \(E,R > 0\) sufficiently small. Then the map \(\Pi ^{(\alpha )}_1:\Sigma _1^{{\text {in} }} \rightarrow \Sigma _1^{{\text {out} }}\) is well-defined with the following properties:
-
(a)
(Asymptotics). We have
$$\begin{aligned} \Pi ^{(\alpha )}_1(r_1, \theta _1,R,\varepsilon _1) = \left( \Pi ^{(\alpha )}_{1,r_1}(r_1,\theta _1,\varepsilon _1), { h_{\theta _1}^{(\alpha )}(r_1,\theta _1,\varepsilon _1)}, \frac{R}{E} \varepsilon _1, E \right) , \end{aligned}$$where
$$\begin{aligned} \Pi ^{(\alpha )}_{1,r_1} (r_1,\theta _1,\varepsilon _1) = {h_{r_1}^{(\alpha )}}\left( {h_{\theta _1}^{(\alpha )}(r_1,\theta _1,\varepsilon _1)} , \frac{R}{E}\varepsilon _1,E \right) + {\mathcal {O}}\left( \textrm{e}^{- {{\tilde{\varrho }} }/ \varepsilon _1^3}\right) \end{aligned}$$where \({\tilde{\varrho }} = \frac{2\varrho }{3c_0}\), the constant \(\varrho \) and the function \(h_{r_1}^{(\alpha )}\) are the same as those in Lemma 4.6, and \(h_{\theta _1}^{(\alpha )}(r_1, \theta _1, \varepsilon _1) = {{\tilde{h}}}_{\theta _1}^{(\alpha )}(r_1, \theta _1, \varepsilon _1) \mod 1\), where
$$\begin{aligned} {{{\tilde{h}}}_{\theta _1}^{(\alpha )}(r_1,\theta _1,\varepsilon _1) = \theta _1 + \frac{(R \varepsilon _1)^{\alpha - 1}}{{c_0}} \left( \frac{1}{{\varepsilon _1}^2} + {\mathcal {O}}(1)\right) .} \end{aligned}$$ -
(b)
(Strong contraction). The \(r_1\)-component of \(\Pi _1^{(\alpha )}\) is a strong contraction with respect to \(r_1\). More precisely,
$$\begin{aligned} \frac{\partial {\Pi _{1,r_1}^{(\alpha )}}}{\partial r_1} (r_1,\theta _1,\varepsilon _1) = {\mathcal {O}}\left( \textrm{e}^{ - {{\tilde{\varrho }}} / \varepsilon _1^3}\right) . \end{aligned}$$The image \({\Pi _1^{(\alpha )}}(\Sigma _1^{{\text {in} }}) \subset \Sigma _1^{{\text {out} }}\) is a wedge-like region about the intersection \(M_1^{{\text {a} }} \cap \Sigma _1^{{\text {out} }}\).
Proof
Consider an initial condition \((r_1, \theta _1, R, \varepsilon _1) \in \Sigma _1^{{\text {in} }}\). The form of the map \({\Pi _{1}^{(\alpha )}}(r_1, \theta _1,R,\varepsilon _1)\) follows immediately after evaluating the solutions for \(\theta _1(t_1), \rho _1(t_1)\), and \(\varepsilon _1(t_1)\) at \(t_1 = T_1\) using Lemma 4.8 and defining \(h_{\theta _1}^{(\alpha )}(r_1,\theta _1,\varepsilon _1) = \theta _1(T_1)\). The expression for \(r_1(T_1) = {\Pi _{1,r_1}^{(\alpha )}}(r_1,\theta _1,\varepsilon _1)\) follows from Lemma 4.6. Specifically, choosing E, R sufficiently small ensures that the initial condition \((r_1, \theta _1, R, \varepsilon _1)\) is contained in a fast fiber of \(M_1^{{\text {a} }}\). It follows that
for the constant \(\varrho \) of Lemma 4.6. Thus \(r_1(T_1) = {h_{r_1}^{(\alpha )}}(\theta _1(T_1), \rho _1(T_1), E) + {{\mathcal {O}}(\textrm{e}^{-\varrho T_1})} \), which yields the expression in Assertion (a) after substituting the expression for \(T_1\) in Lemma 4.8.
Assertion (b) follows by direct differentiation. The estimate follows since \({h_{r_1}^{(\alpha )}}(\theta _1,\rho _1,\varepsilon _1)\) does not depend on \(r_1\). \(\square \)
Remark 4.10
Strictly speaking, the arguments above only guarantee that \({\Pi _1^{(\alpha )}}\) is well-defined for initial conditions with \(\varepsilon _1 \in (0,E]\). This is not problematic since we aim to derive results for \(\varepsilon > 0\).
4.3 Dynamics in the Rescaling Chart \(K_2\)
In chart \(K_2\) we study solutions close to the extension of the centre manifold \(M_2^{{\text {a} }} = \kappa _{12}(M_1^{{\text {a} }})\).
Lemma 4.11
Following the singular time rescaling \(\rho _2 \textrm{d}t = \textrm{d}t_2\) or equivalently, \(\rho _2 t = t_2\), the desingularised equations in chart \(K_2\) are given by
where by a slight abuse of notation we now write \((\cdot )' = \textrm{d}/ \textrm{d}t_2\). Since \(0 < \rho _2 = \varepsilon \ll 1\), system (39) can also be viewed as a perturbation problem in \((r_2,\theta _2,y_2)\)-space as \(\rho _2 \rightarrow 0\).
Proof
This follows immediately after differentiating the defining expressions for local \(K_2\) coordinates in (31) and applying \(\rho _2 t = t_2\). \(\square \)
In order to understand system (39), we first consider the limiting system as \(\rho _2 \rightarrow 0\), i.e.
There are two possibilities for the angular dynamics, depending on \(\alpha \), since
We start with the case \(\alpha = 2\). In this case, we obtain a \(\theta _2\)-family of planar systems
where \(a = a(\theta _2)\), \(b = b(\theta _2)\) and \(c = c(\theta _2)\) define (parameter dependent) positive constants. The transformation
leads to
which is precisely the Riccati-type equation which arises within the \(K_2\) chart in the analysis of the regular fold point in Krupa and Szmolyan (2001a). For each fixed \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\), solutions to system (43) (and therefore also (41)) can be written in terms of Airy functions, whose asymptotic properties are known (Grasman 1987; Mishchenko et al. 1975). The properties that are relevant for our purposes are collected in Mishchenko et al. (1975) and reformulated in a notation similar to ours in Krupa and Szmolyan (2001a). The following result is a direct extension of the latter formulation; we simply append the existing result with the decoupled angular dynamics induced by the equation for \(\theta _2\).
Proposition 4.12
Fix \(\alpha = 2\) and consider the restricted system (39) \(|_{\rho _2 = 0}\) or, equivalently, the limiting system (40). The following assertions are true:
-
(a)
Every orbit approaches a two-dimensional horizontal asymptote/plane \(y_2 = y_r\) from \(y_2 > y_r\) as \(r_2 \rightarrow \infty \). The value of \(y_r\) depends on the initial conditions.
-
(b)
There exists a unique, invariant two-dimensional surface
$$\begin{aligned} \gamma _2 {:}{=}\left\{ \left( r_2,\theta _2, {h^{(2)}_{y_2}(r_2)}, 0\right) : r_2 \in {\mathbb {R}}, \, \theta _2 \in {\mathbb {R}}/ {\mathbb {Z}} \right\} , \end{aligned}$$(44)where \(h^{(2)}_{y_2}(r_2)\) is smooth with asymptotics
$$\begin{aligned} \begin{aligned}&h^{(2)}_{y_2}(r_2) = \frac{b}{a} r_2^2 + \frac{c}{{2}b} \frac{1}{r_2} + {\mathcal {O}}\left( \frac{1}{r_2^4}\right) \qquad{} & {} {\text {as } } r_2 \rightarrow -\infty , \\&h^{(2)}_{y_2}(r_2) = - \left( \frac{c^2}{a b} \right) ^{1/3} \Omega _0 + \frac{c}{b} \frac{1}{r_2} + {\mathcal {O}}\left( \frac{1}{r_2^3} \right){} & {} {\text {as } } r_2 \rightarrow \infty , \end{aligned} \end{aligned}$$and \(\Omega _0\) is the constant defined in Theorem 3.2.
-
(c)
All orbits with initial conditions to the right of \(\gamma _2\) in the \((r_2,y_2)\)-plane are backwards asymptotic to the paraboloid \(\{(r_2, \theta _2, (b/a) r_2^2,0): \, r_2 \ge 0, \theta _2 \in {\mathbb {R}}/ {\mathbb {Z}} \}\).
-
(d)
All orbits with initial condition to the left of \(\gamma _2\) in the \((r_2,y_2)\)-plane are backwards asymptotic to a horizontal asymptote/plane \(y_2 = y_l\). Specifically, \(y_2(t_2) \rightarrow y_l\) from below and \(r_2(t_2) \rightarrow -\infty \) as \(t_2 \rightarrow -\infty \). The value of \(y_l\) depends on the initial conditions, but satisfies \(y_l > y_r\) for each fixed orbit.
-
(e)
The unique centre manifold \(N_1^{{\text {a} }}\) described in Lemma 4.6 coincides with the surface \(\gamma _2\) where \(K_1\) and \(K_2\) overlap, i.e. \(\kappa _{12}(N_1^{{\text {a} }}) = \gamma _2\) on \(\{y_2 > 0\}\).
Proof
See Mishchenko et al. (1975) and in particular (Krupa and Szmolyan 2001a, Prop. 2.3), which cover Assertions (a)–(d) in the planar case, for the transformed system (43). The corresponding statements for system (41) can be obtained directly from these results using the transformation in (42). Since the angular variable \(\theta _2 = const.\) when \(\alpha = 2\), Assertions (a)–(d) are obtained as higher-dimensional analogues from these results after a simple rotation through \(\theta _2 \in [0,1)\).
Assertion (e) is a straightforward adaptation of Krupa and Szmolyan (2001a, Prop. 2.6 Assertion (5)). \(\square \)
The Riccati dynamics described in Proposition 4.12 are sketched for the decoupled planar system (41) in Fig. 12, and for the three-dimensional limiting system (40) in Fig. 13.
We now consider the case \(\alpha = 1\), for which system (40) can be written as the non-autonomous planar system
where the functions
are smooth, positive and 1-periodic in \(t_2\) due to the positivity and 1-periodicity of \(a(\theta )\), \(b(\theta )\) and \(c(\theta )\); recall Proposition 2.5. Using
we may write (45) as a Riccati equation
We now define the constants
and use equation (47) in the derivation of the following result.

Dynamics of the Riccati equation (41) in the \((r_2,y_2)\)-plane for \(\alpha =2\) and a fixed choice of \(\theta _2\) (\(\theta _2\) is a parameter when \(\alpha = 2\) and \(\rho _2 = 0\)). A qualitatively similar figure is obtained for each \(\theta _2 \in {\mathbb {R}}/ {\mathbb {Z}}\). The distinguished solution \(\gamma _2\) with asymptotics described by Proposition 4.12 is shown in red. The parabola \(y_2 = (b{(\theta _2)}/a{(\theta _2)}) r_2^2\) which separates solutions with different asymptotic properties is also shown. Projections of the entry and exit sections \(\Sigma _2^{{\text {in} }}\) and \(\Sigma _2^{{\text {out} }}\) are shown in yellow and cyan, respectively (Color figure online)

Geometry and dynamics of the limiting Riccati equation (39)\(|_{\rho _2 = 0}\) (or equivalently (40)) in \((r_2,\theta _2,y_2)\)-space. The two-dimensional surface \(\gamma _2\) is shown in shaded red and coincides with the extension of the two-dimensional centre manifold \(N_1^{{\text {a} }}\) described in Lemma 4.6 into chart \(K_2\) according to Proposition 4.12 Assertion (e). The evolution of initial conditions in \({\Sigma _2^{{\text {in} }}}\) up to \(\Sigma _2^{{\text {out} }}\) is described by Proposition 4.16, which implies that the image \({\Pi _2^{(2)}}(\Sigma _2^\text {in} \cap M_1^{{\text {a} }}) \subset \Sigma _2^{{\text {out} }}\), shown here in green, is contained within the surface defined by the graph \(y_2 = - (c^2(\theta _2)/(a(\theta _2)b(\theta _2)) )^{1/3} \Omega _0 + E\) over \(\theta _2 \in {\mathbb {R}}/ {\mathbb {Z}}\) (see also Lemma 4.17) (Color figure online)
Proposition 4.13
Fix \(\alpha = 1\) and consider the restricted system (39) \(|_{\rho _2 = 0}\) or, equivalently, the limiting system (40). For sufficiently small but fixed \(E, R > 0\), solutions with initial conditions
reach the set
in finite time, where \(\nu >0\) is a constant. In particular, we have that \(\kappa _{12}(N_1^{{\text {a} }} {\cap \Sigma _1^{{\text {out} }}}) \subset {\widetilde{\Sigma }}_2^{{\text {in} }} \cap \{r_2 \in (\beta _- / ER, \beta _+ / ER)\}\), where \(N_1^{{\text {a} }}\) is the unique centre manifold described in Lemma 4.6.
Proof
The idea is to bound solutions to the Riccati equation (47) between upper and lower solutions with known asymptotics as \(r_2 \rightarrow \infty \). Specifically, upper and lower solutions will be obtained as concatenations of solutions to Riccati equations of the form
where \(\lambda , \mu \ne 0\) are suitably chosen constants. Note that it is equivalent to compare solutions of the two planar autonomous systems (45) and
which has asymptotic properties similar to those of system (41) with \(a = \lambda \), \(b = \mu \) and \(c=1\) (the factor of \({{\tilde{c}}}(t_2)\) does not effect the phase portrait since \(dr_2/dy_2\) has no explicit time dependence).
We start by considering solutions of system (45) with initial conditions \((r_2(0),E^{-2})\) corresponding to points in \({\widetilde{\Sigma }}_2^{{\text {in} }}\) with \(r_2(0) \in [\beta _- / ER, \beta _+ / ER]\). Our first task is to bound the \(r_2\)-component of solutions to (45) on the interval \(t_2 \in [0,T_0]\), where \(T_0 > 0\) is the unique solution to \(\varphi (T_0) = E^{-2}\). If a solution exists until \(t_2 = T_0\) (and has not blown up in a finite time smaller than \(T_0\)), the definition of \(T_0\) corresponds to the intersection of solutions with \(\{y_2 = 0\}\) (recall that \(y_2(t_2) = E^{-2} - \varphi (t_2)\), see (46)). We get a left-bound to the Riccati equation (47) by identifying a lower solution \(\underline{r_2}(t_2) \le r_2(t_2)\). This is obtained by letting \(\underline{r_2}(t_2)\) be a solution of (49) with \((\underline{r_2}(0), y_2(0)) = (\beta _- / ER, E^{-2})\) and \(\lambda , \mu \) replaced by
respectively. This ensures that \(\underline{r_2}(0) \le r_2(0)\) and
for all \(t_2 \in [0,T_0]\), as \(\varphi (t_2) - E^{-2} \le 0\) for \(t_2 \in [0,T_0]\). Solutions of equation (49) with \(\lambda = {\underline{\lambda }}\) and \(\mu = {\underline{\mu }}\) are described by Proposition 4.12 after a simple transformation similar to that in (42). In particular, there exists an invariant two-dimensional surface \({\underline{\gamma }}_2\) with properties similar to the surface \(\gamma _2\), which intersects \(\{y_2 = 0\}\). Choosing E and R sufficiently small guarantees that the initial condition \(\underline{r_2}(0) = \beta _- / ER\) is smaller than the \({r_2}\)-coordinate of the intersection \({\underline{\gamma }}_2 \cap \{y_2 = E^{-2}\}\). This implies that the solution \((\underline{r_2}(t_2), y_2(t_2))\) also intersects \(\{y_2 = 0\}\). Thus, using (47), we conclude that \(\underline{r_2}(t_2)\) is a lower solution for \(r_2(t_2)\), with \(\underline{r_2}(t_2) \le r_2(t_2)\) for all \(t_2 \in [0,T_0]\).
An upper solution \(\overline{r_2}(t_2)\) with the initial condition \((\overline{ r_2}(0), y_2(0)) = (\beta _+ / ER, E^{-2})\) can be constructed in a similar way, by identifying \(\overline{r_2}(t_2)\) as the solution of the Riccati equation (49) with \(\lambda , \mu \) replaced by
respectively. We have that \(\overline{r_2}(0) \ge r_2(0)\) and
for all \(t_2 \in [0,T_0]\). There are now two different possibilities, depending on whether \(\overline{r_2}(t_2)\) blows up in finite time for \(\overline{r_2} \rightarrow \infty \) (case A), or exists up to the intersection with \(\{y_2 = 0\}\), i.e. for all \(t_2 \in [0,T_0]\) (case B). Blow-up for \(\overline{r_2} \rightarrow - \infty \) is not possible as solutions of equation (49) with \(\lambda = {\overline{\lambda }}\) and \(\mu = {\overline{\mu }}\) are described by Proposition 4.12 after a simple transformation similar to that in (42). In particular, there exists an invariant two-dimensional surface \({\overline{\gamma }}_2\) with properties similar to the surface \(\gamma _2\), which intersects \(\{y_2 = 0\}\). Choosing E and R sufficiently small guarantees that the initial condition \(\overline{r_2}(0) = \beta _+ / ER\) is larger than the \({r_2}\)-coordinate of the intersection \({\overline{\gamma }}_2 \cap \{y_2 = E^{-2}\}\), implying that \(\overline{r_2}\) cannot blow up as \(\overline{r_2} \rightarrow - \infty \). Hence it is sufficient to study case A and case B in the following.
In case A, the solution \(\overline{r_2}(t_2)\) blows up in finite time \(T_0^*< T_0\). The analogous statement to Proposition 4.12 for the Riccati equation with \(a = \overline{ \lambda }\), \(b = \overline{\mu }\), \(c = 1\) implies that \((\overline{r_2}(t_2), y_2(t_2))\) converges to a horizontal asymptote \(y_2 = y_2^*\), therefore intersecting \(\{r_2 = E^{-1}\}\) transversally (assuming \(E > 0\) is small enough). Using (47), we conclude that \(\overline{r_2}(t_2) \ge r_2(t_2)\) for all \(t_2 \in [0,T_0^*)\). As \(y_2' <0\) it holds \(y_2(t_2) \le y_2^*\) for all \(t_2 \ge T_0^*\), as long as the solution of (45) exists. We show later that \(r_2(t_2)\) can also be bounded by a lower solution transversally intersecting \(\{r_2 = E^{-1}\}\), such that also \(r_2(t_2)\) transversally intersects \(\{r_2 = E^{-1}\}\). By choosing E sufficiently small such that \(y_2^*E^2<\nu \), we can guarantee that the intersection takes place in \(\{r_2 = E^{-1}, y_2 < \nu E^{-2}\}\).
In case B, \(\overline{r_2}(t_2)\) exists for all \(t_2 \in [0,T_0]\) and hence intersects \(\{y_2 = 0\}\). Using (47), we can conclude that \(\overline{r_2}(t_2) \ge r_2(t_2)\) for all \(t_2 \in [0,T_0]\). Combining this with the results for the lower solution \(\underline{r_2}(t_2)\), we have that
on \(t_2 \in [0,T_0]\). In particular, along \(y_2 = 0\) we have
The situation is sketched in Fig. 14 for case A and in Fig. 15 for case B.
The functions \(\underline{r_2}\) and \(\overline{r_2}\) (the latter only in case B) do not necessarily define lower and upper solutions when \(y_2 < 0\) (i.e. when \(t_2 > T_0\)), since inequalities (51) and (52) may no longer be satisfied. We can, however, connect to different lower and upper solutions which we denote by \(\underline{{{\tilde{r}}}_2}(t_2)\) and \(\overline{{{\tilde{r}}}_2}(t_2)\), respectively, with initial conditions \(\underline{{{\tilde{r}}}_2}(T_0) = \underline{r_2}(T_0)\) and \(\overline{{{\tilde{r}}}_2}(T_0) = \overline{r_2}(T_0)\), obtained as segments of solutions to (49) with \(\lambda , \mu \) replaced by
and
respectively. This time, we may apply Proposition 4.12 for the Riccati equation with \(a = \underline{{\tilde{\lambda }}}\), \(b = \underline{{\tilde{\mu }}}\), \(c=1\) and \(a = \overline{ {\tilde{\lambda }}}\), \(b = \overline{ {\tilde{\mu }}}\), \(c=1\), respectively. We find that \(\underline{ {{\tilde{r}}}_2}(t_2)\), \(\overline{ {{\tilde{r}}}_2}(t_2) \rightarrow \infty \), and that orbits of the corresponding planar systems approach horizontal asymptotes \(y_2 = y_{r_\pm }\) in the \((r_2,y_2)\)-plane from above. Thus, \(\underline{ {{\tilde{r}}}_2}(t_2)\) and \(\overline{ {{\tilde{r}}}_2}(t_2)\) blow up in finite time. The relation \(y_2(t_2) = E^{-2} - \varphi (t_2)\) leads to the following implicit equations for the blow-up times \(t_2^{\pm }\):
With initial conditions \(\underline{{{\tilde{r}}}_2}(T_0) = \underline{r_2}(T_0)\) and \(\overline{{{\tilde{r}}}_2}(T_0) = \overline{r_2}(T_0)\), the constructed upper and lower solutions guarantee that \(\underline{{{\tilde{r}}}}_2(t_2) \le r_2(t_2) \le \overline{{{\tilde{r}}}_2}(t_2)\) for all \(t_2 \in [T_0, t_2^+]\), see Fig. 15. Consequently there exists \(t_2^c \in [t_2^+,t_2^-]\), such that \(r_2(t_2) \rightarrow \infty \) as \(t_2 \rightarrow t_2^c\) from below and \(r_2(t_2)\) crosses the hyperplane \(\{r_2 = E^{-1}\}\).
In case B, choosing E sufficiently small such that \(\nu > \vert y_{r_-} \vert E^2\) guarantees that \(\underline{{{\tilde{r}}}}_2(t_2)\) and \(\overline{{{\tilde{r}}}_2}(t_2)\) and thus also \(r_2(t_2)\) transversally intersect \(\{r_2 = E^{-1}\}\) in the section \({\tilde{\Sigma }}_2^\text {out}\).
In case A, choosing E sufficiently small such that such that \(\nu >\max \{\vert y_{r_-} \vert , y^*\} E^2\) guarantees that \(\underline{{{\tilde{r}}}}_2(t_2)\) and \(\overline{r_2}(t_2)\) and thus also \(r_2(t_2)\) transversally intersect \(\{r_2 = E^{-1}\}\) in the section \({\tilde{\Sigma }}_2^\text {out}\). \(\square \)
Remark 4.14
As pointed out by an anonymous referee, the proof of Proposition 4.13 can be simplified by fixing \(\nu \ge 1\), in which case the existence of lower solutions \(\underline{r_2}\) and \(\underline{{{\tilde{r}}}_2}\) and the fact that \(y_2' < 0\) are sufficient to show that solutions intersect \({\widetilde{\Sigma }}_2^{{\text {in} }}\). The existence of upper solutions \(\overline{r_2}\) and \(\overline{{{\tilde{r}}}_2}\) allows for greater control of the solutions when \(\nu < 1\), but it is not strictly necessary for the proof of Theorem 3.2.

Case A of the Riccati dynamics for \(\alpha = 1\). The upper solution \(\overline{r_2}\) does not intersect with \(\{y_2 = 0\}\) and converges to a horizontal asymptote intersecting \(\Sigma _2^\text {out}\) transversally. The lower solution \(\underline{r_2}\) intersects \(\{y_2 = 0\}\) at \(\underline{r_2}(T_0)\), where it connects to the lower solution \(\underline{ {{\tilde{r}}}_2}\), which also converges to a horizontal asymptote intersecting \(\Sigma _2^\text {out}\) transversally. Solutions to the Riccati equation (47) with initial conditions in \(\kappa _{12}(N_1^{{\text {a} }} \cap \Sigma _1^{{\text {out} }}) \subset {\widetilde{\Sigma }}_2^{{\text {in} }}\) are sketched in shaded red and have \(r_2\)-coordinates which are bounded between \(\underline{ r_2}\) and \(\overline{r_2}\) (\(\underline{ {{\tilde{r}}}_2}\) and \(\overline{r_2}\)) when \(y_2 \ge 0\) (\(y_2 \le 0)\). For fixed initial condition \(\theta _2^*\), a sample trajectory is shown in red (Color figure online)

Case B of the Riccati dynamics for \(\alpha = 1\). The upper solution \(\overline{r_2}\) intersects \(\{y_2 = 0\}\) at \(\overline{r_2}(T_0)\), where it connects to the upper solution \(\overline{ {{\tilde{r}}}_2}\), which converges to a horizontal asymptote intersecting \(\Sigma _2^\text {out}\) transversally. The lower solution \(\underline{r_2}\) intersects \(\{y_2 = 0\}\) at \(\underline{r_2}(T_0)\), where it connects to the lower solution \(\underline{ {{\tilde{r}}}_2}\), which also converges to a horizontal asymptote intersecting \(\Sigma _2^\text {out}\) transversally. Solutions to the Riccati equation (47) with initial conditions in \(\kappa _{12}(N_1^{{\text {a} }} \cap \Sigma _1^{{\text {out} }}) \subset {\widetilde{\Sigma }}_2^{{\text {in} }}\) are sketched in shaded red and have \(r_2\)-coordinates which are bounded between \(\underline{ r_2}\) and \(\overline{r_2}\) (\(\underline{ {{\tilde{r}}}_2}\) and \(\overline{{{\tilde{r}}}_2}\)) when \(y_2 \ge 0\) (\(y_2 \le 0)\). For a fixed initial condition \(\theta _2^*\), a sample trajectory is shown in red (Color figure online)
Propositions 4.12 and 4.13 can be used to describe the limiting behaviour of the \(y_2\)-component of the map \(\Pi ^{(\alpha )}_2: \Sigma _2^{{\text {in} }} \rightarrow \Sigma _2^{{\text {out} }}\) induced by the flow of initial conditions in
which is related to the exit section in chart \(K_1\) via \(\Sigma _2^{{\text {in} }} = \kappa _{12}(\Sigma _1^{{\text {out} }})\), up to the exit section
where \(\nu > 0\) is the constant in Proposition 4.13.
Similarly to the analysis in \(K_1\), the remaining components of the image \(\Pi ^{(\alpha )}_2(r_2, \theta _2, E^{-2}, \rho _2)\) can be estimated directly.
Lemma 4.15
Consider an initial condition \((r_2,\theta _2,E^{-2},\rho _2)(0) = (r_2^*, \theta _2^*, E^{-2}, \rho _2) \in \Sigma _2^{{\text {in} }}\) for system (39). Then
where \(c(\theta ^*_2) = const. > 0\) and \(\varphi (t_2)\) is the function defined in (46).
Proof
The solutions are obtained by direct integration. \(\square \)
In the following we define the function \(h_{y_2}^{(\alpha )}(r_2,\theta _2)\) so that (i)
(Proposition 4.13 guarantees the existence of this intersection), and (ii) \(h_{y_2}^{(2)}(E^{-1},\theta _2)\) is precisely the function \(h_{y_2}^{(2)}\) defining the special Riccati solution in Proposition 4.12 (we simply suppressed the parameter dependence on \(\theta _2\) in the notation there). Combining Propositions 4.12–4.13 and Lemma 4.15, we obtain the following characterisation of the transition map \(\Pi ^{(\alpha )}_2: \Sigma _2^{{\text {in} }} \rightarrow \Sigma _2^{{\text {out} }}\), which summarises the dynamics in chart \(K_2\).
Proposition 4.16
For sufficiently small but fixed \(E, R > 0\), \(\Pi ^{(\alpha )}_2: \Sigma _2^{{\text {in} }} \rightarrow \Sigma _2^{{\text {out} }}\) is a well-defined diffeomorphism of the form
where \(r_{2,c}\) is the (generally \(\theta _2\)-dependent) \(r_2\)-coordinate of the intersection \(\kappa _{12}(N_1^{{\text {a} }} \cap {\Sigma _1^{{\text {out} }}}) \in \Sigma _2^{{\text {in} }}\), which is defined implicitly via the relation \(h_{y_2}^{(\alpha )}(r_{2,c}, \theta _2) = E^{-2}\), and \(h_{\theta _2}^{(\alpha )}(r_2, \theta _2, \rho _2) = {{\tilde{h}}}_{\theta _2}^{(\alpha )}(r_2, \theta _2, \rho _2) \mod 1\) where

Geometry and dynamics projected into \((r_2,y_2,\rho _2)\)-space for \(\alpha =2\); c.f. Figs. 12 and 13. The extension of the (projected) three-dimensional manifold \(M_2^{{\text {a} }}\) is sketched in shaded green. The image of the wedge-shaped region \(\kappa _{12}({\Pi _1^{(2)}}(\Sigma _1^{{\text {in} }})) \subset \Sigma _2^{{\text {in} }}\) (recall Proposition 4.9) under \({\Pi _2^{(2)}}\) is also shown in shaded green (Color figure online)
Proof
We start with the case \(\alpha = 2\) and let \((r_{2,c}, \theta _2, E^{-2}, 0)\) denote the \(K_2\) coordinates of the intersection \(\gamma _2 \cap \Sigma _2^{{\text {in} }}\). It follows from Proposition 4.12 and Lemma 4.15 that
where \(T_2 > 0\) is the transition time taken from \(\Sigma _2^{{\text {in} }}\) to reach \(\Sigma _2^{{\text {out} }}\), \({\text {Int} } \ \Sigma _2^{{\text {out} }}\) denotes the interior of \(\Sigma _2^{{\text {out} }}\) in \(\{E^{-1}\} \times {\mathbb {R}}/ {\mathbb {Z}} \times {\mathbb {R}}\times {\mathbb {R}}_{\ge 0}\), and the containment in \({\text {Int} } \ \Sigma _2^{{\text {out} }}\) follows from the asymptotics \({h_{y_2}^{(2)}}(\eta ^{-1}, \theta _2) = - (c^2 / ab)^{1/3} \Omega _0 + (c/b) \eta + {\mathcal {O}}(\eta ^3)\) as \(\eta \rightarrow 0^+\) in Proposition 4.12 Assertion (b) (note that \(a = a(\theta _2)\), \(b = b(\theta _2)\) and \(c = c(\theta _2)\) are constant functions of the initial value \(\theta _2\) here). The transition time for an initial condition with \(\rho _2 = 0\) can be estimated using Lemma 4.15. In particular,
which implies that
Since the transition time \(T_2\) is finite and system (40) is a regular perturbation problem, a neighbourhood of \((r_{2,c}, \theta _2, E^{-2}, 0) \in \Sigma _2^{{\text {in} }}\) is mapped diffeomorphically to a neighbourhood of \(\gamma _2 \cap \Sigma _2^{{\text {out} }}\) in \(\Sigma _2^{{\text {out} }}\). The form of the map in Proposition 4.16 follows.
Now fix \(\alpha = 1\). In this case the transition time \(T_2\) satisfies \(0< T_2^- \le T_2 \le T_2^+ < \infty \), where \(T_2^\pm \) are the transition times associated to the lower/upper solutions used in the proof of Proposition 4.13. The result from here follows similarly to the case \(\alpha = 2\), using the fact that \(T_2\) is finite and that system (40) is a regular perturbation problem. \(\square \)
The extension of \(M_2^{{\text {a} }}\) up to \(\Sigma _2^{{\text {out} }}\), as described by Proposition 4.16, is shown in projections onto \((r_2,\theta _2,y_2)\)- and \((r_2,y_2,\rho _2)\)-space for \(\alpha = 2\) in Figs. 13 and 16, respectively.
Finally we note that if \(\alpha = 2\), then the expression for \(h^{(2)}_{y_2}(E^{-1}, \theta _2)\) (and therefore the map \(\Pi ^{(2)}_2\)) can be simplified using the following result, which can be found in Krupa and Szmolyan (2001a).
Lemma 4.17
For \(\alpha = 2\), the Riccati function \(h^{(2)}_{y_2}\) defined in Proposition 4.12 satisfies
where \(a = a(\theta _2)\), \(b = b(\theta _2)\) and \(c = c(\theta _2)\).
Proof
This can be proven using the asymptotic properties of the decoupled Riccati equation (41) described in Proposition 4.12. Since the proof does not depend on the angular dynamics (\(\theta _2 = const.\) when \(\rho _2 = 0\) and \(\alpha = 2\)), we refer to Krupa and Szmolyan (2001a, Rem. 2.10 and Prop. 2.11). \(\square \)
4.4 Dynamics in the Exit Chart \(K_3\)
In chart \(K_3\) we study solutions close to the extension of the manifold \(M_3^{{\text {a} }} = \kappa _{23}(M_2^{{\text {a} }})\) as it leaves a neighbourhood of the singular cycle \(S_0^{{\text {c} }}\).
Lemma 4.18
Following the positive transformation of time \(\rho _3 \textrm{d}t = \textrm{d}t_3\), the desingularised equations in chart \(K_3\) are given by
where \(F(\rho _3,\theta _3,y_3,\varepsilon _3) = b(\theta ) - a(\theta ) y_3+ {\mathcal {O}}(\rho _3)\).
Proof
This follows after direct differentiation of the local coordinate expressions in (31) and subsequent application of the desingularisation \(\rho _3 \textrm{d}t = \textrm{d}t_3\). \(\square \)
Except for the angular coordinate \(\theta _3\), the analysis in \(K_3\) is entirely local. Specifically, we focus on dynamics within the set
where E, R and \(\nu \) are the same positive constants used to define the entry and exit sections in charts \(K_1\) and \(K_2\). System (54) has a circular critical manifold
with the following properties.

Geometry and dynamics within \({\mathcal {D}}_3\), shown in \((r_3,\rho _3,\varepsilon _3)\)-space for \(\alpha =2\). The (projection of the) two-dimensional surface \(\gamma _3 = \kappa _{23}(\gamma _2)\) shown in red connects to the circular saddle-type critical manifold Q, which is indicated by the purple dot at the origin. Entry and exit sections \(\Sigma _3^{{\text {in} }}\) and \(\Sigma _3^{{\text {out} }}\) are shown in shaded cyan and orange, respectively. The wedge-shaped region within \(\Sigma _2^{{\text {out} }}\) (shown in shaded green in Fig. 16) is shown here in \(\Sigma _3^{{\text {in} }}\) (again in shaded green), along with its image in \(\Sigma _3^{{\text {out} }}\) under \({\Pi _3^{(2)}}\). The projection of the three-dimensional manifold \(M_3^{{\text {a} }}\) with base along \(\gamma _3 \cup \{y_3 = \varepsilon _3 = 0, \rho _3 \ge 0\}\) is also shown (Color figure online)
Lemma 4.19
Consider system (54). Q is normally hyperbolic and saddle type. More precisely, the linearisation along Q has eigenvalues
and corresponding eigenvectors (1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 1, 0) and \((0,-\alpha \rho _3^{\alpha -1} \varepsilon _3^{\alpha -1}/b(\theta ), 0, 1)\), respectively.
Proof
Direct calculation. \(\square \)
Lemma 4.19 implies the existence of local centre, stable and unstable manifolds at Q. Specifically, there is a one-dimensional centre manifold \(W_{3}^{{\text {c} }}(Q)\), a two-dimensional stable manifold \(W_{3}^{{\text {s} }}(Q)\), and a one-dimensional unstable manifold \(W_{3}^{{\text {u} }}(Q)\). The geometry is sketched in different three-dimensional subspaces and projections in Figs. 17, 18 and 19.
If \(\alpha =2\), we can show that the extension of the surface \(\gamma _2\) connects to the critical manifold Q tangentially to the cylinder spanned by the centre and weakly stable eigenvectors.
Lemma 4.20
Fix \(\alpha =2\). Then the extension of \(\gamma _2\) under system (54), i.e. \(\gamma _3 = \kappa _{23}(\gamma _2)\), connects to Q tangentially to the cylinder segment \(\{ (0,\theta _3, 0, \varepsilon _3) \in {\mathcal {D}}_3 \}\).
Proof
Applying the change of coordinates formula in (32) together with the Riccati asymptotics as \(r_2 \rightarrow \infty \) in Proposition 4.12 Assertion (b), we obtain
where \(a = a(\theta _3)\), \(b = b(\theta _3)\) and \(c = c(\theta _3)\) are constant (\(\theta _3' = 0\) in \(\{\rho _3 = 0\}\)), which converges to the critical manifold Q tangentially to \(\{ (0,\theta _3, 0, \varepsilon _3) \in {\mathcal {D}}_3 \}\) as \(\varepsilon _3 \rightarrow 0\).
\(\square \)
Having described the geometry for \(\alpha = 2\), we turn our attention to the characteristics of the map \({\Pi _3^{(\alpha )}}: \Sigma _3^{{\text {in} }} \rightarrow \Sigma _3^{{\text {out} }}\) induced by the flow of initial conditions in
which corresponds to the exit section \(\Sigma _2^{{\text {out} }}\) in chart \(K_2\) via \(\Sigma _3^{{\text {in} }} = \kappa _{23}(\Sigma _2^{{\text {out} }})\), up to the exit section
which is precisely the representation of the exit section \(\Delta _\varepsilon ^{{\text {out} }}\) defined in (29) after blow-up in chart \(K_3\) if we set \(y_0 = R^2 \nu \). Similarly to the \(K_3\) analysis for the regular fold point in Krupa and Szmolyan (2001a), \({\Pi _3^{(\alpha )}}\) can be analysed directly after a second positive transformation of time \(F(\rho _3,\theta _3,y_3,\varepsilon _3) \textrm{d}t_3 = \textrm{d}{\tilde{t}}_3\), which amounts to division of the right-hand side in system (54) by \(F(\rho _3,\theta _3,y_3,\varepsilon _3)\) (which is strictly positive in \({\mathcal {D}}_3\)). This leads to the orbitally equivalent system
where by a slight abuse of notation the prime notation now refers to differentiation with respect to \({{\tilde{t}}}_3\).
System (55) is used to obtain the following result.

Geometry and dynamics within the invariant hyperplane \(\{\rho _3 = 0\}\) with \(\alpha = 2\), projected into \((y_3,\theta _3,\varepsilon _3)\)-space; c.f. Fig. 17 (Color figure online)

Proposition 4.21
Fix \(\nu >0\) and \(E, R> 0\) sufficiently small. Then the map \({\Pi _3^{(\alpha )}}: \Sigma _3^{{\text {in} }} \rightarrow \Sigma _3^{{\text {out} }}\) is well-defined and given by
We have that \(h_{\theta _3}^{(\alpha )}(\rho _3,\theta _3,y_3) = {{\tilde{h}}}_{\theta _3}^{(\alpha )}(\rho _3,\theta _3,y_3) \mod 1\), where
Moreover, there exist constants \(\sigma _- < \sigma _+\) such that in case \(\alpha = 1\) we have
In case \(\alpha = 2\) we have
Proof
We start with the case \(\alpha =2 \), and consider solutions of system (55) which satisfy \((\rho _3,\theta _3,y_3,\varepsilon _3)(0) = (\rho _3^*,\theta _3^*,y_3^*,E) \in \Sigma _3^{{\text {in} }}\) and \((R, \theta _3, y_3,\varepsilon _3)(T_3) \in \Sigma _3^{{\text {out} }}\) for some \(T_3 > 0\). The equations for \(\rho _3\) and \(\varepsilon _3\) can be solved directly, leading to \(\rho _3({{\tilde{t}}}_3) = \rho _3^*\textrm{e}^{{{\tilde{t}}}_3}\) and \(\varepsilon _3({{\tilde{t}}}_3) = E \textrm{e}^{- {{\tilde{t}}}_3}\), and the boundary constraint \(\rho _3(T_3) = R\) leads to the following expression for the transition time:
It follows that \(\varepsilon _3(T_3) = E \rho _3^*/ R\), as required. We need to estimate \(y_3(T_3)\) and \(\theta _3(T_3)\) at \({{\tilde{t}}}_3 = T_3\). Since \(\alpha =2\), we have that
One can show with direct estimates that the term in parentheses is uniformly bounded by a positive constant, which implies that
for all \({{\tilde{t}}}_3 \in [0,T_3]\), where \({\zeta _+} \ge {\zeta _-} > 0\) and \({\tilde{\theta }}_3\) is defined via \(\theta _3({{\tilde{t}}}_3) = {\tilde{\theta }}_3({{\tilde{t}}}_3) \mod 1\). Using \(\rho _3({{\tilde{t}}}_3) = \rho _3^*\textrm{e}^{{{\tilde{t}}}_3}\), it follows that \({\tilde{\theta }}_3\) can be written in terms of \(\rho _3\); specifically, we obtain
where we permit a slight abuse of notation in switching the argument from \({{\tilde{t}}}_3\) to \(\rho _3\). Substituting \(\rho _3({{\tilde{t}}}_3) = \rho _3^*\textrm{e}^{{{\tilde{t}}}_3}\) and evaluating the resulting expression at \({{\tilde{t}}}_3 = T_3\) yields the desired estimate for \(\theta _3(T_3) = {{\tilde{h}}}_{\theta _3}^{(2)}(\rho _3,\theta _3,y_3) \mod 1\).
It remains to estimate \(y_3(T_3)\). It will be helpful to use (58) in order to write
where \(a_3 = a(\theta _3^*)\), \(b_3 = b(\theta _3^*)\) and \(c_3 = c(\theta _3^*)\). From here, we use and adaptation of the ‘partial linearisation’ method used in the proof of Krupa and Szmolyan (2001a, Prop. 2.11). Define a new variable \({\tilde{\varepsilon }}_3 = \varepsilon _3^3\), and consider the resulting equations within the invariant hyperplane \(\{\rho _3 = 0\}\):
which may be considered as a \(\theta _3^*\)-family of planar systems in the \((y_3, {\tilde{\varepsilon }}_3)\) variables, with constants \(a_3\), \(b_3\) and \(c_3\) depending on the parameter \(\theta _3^*\). Since the Jacobian at the equilibrium (0, 0) is hyperbolic and non-resonant with the eigenvalues \(-2\) and \(-3\), there exists a parameter-dependent, near-identity transformation of the form
such that the transformed system has been linearised, i.e.
see e.g. Il’yashenko and Yakovenko (1991, Thm. 1). Applying transformation (61) to system (55) and using (59) leads to
where the remainder function \(H(\rho _3, \theta _3, {{\tilde{y}}}_3, {\varepsilon _3})\) is smooth and uniformly bounded over \({{\tilde{t}}}_3 \in [0,T_3]\). Substituting the solutions for \(\rho _3({{\tilde{t}}}_3)\) and \(\varepsilon _3({{\tilde{t}}}_3)\) into the equations for \(\theta _3\) and \({{\tilde{y}}}_3\) in system (63) leads to the planar non-autonomous system
Now introduce a new time-dependent variable \(z_3\) via
Differentiating \({{\tilde{y}}}_3({\tilde{t}}_3)\) and using \(\rho _3({\tilde{t}}_3) = \rho _3^*\textrm{e}^{{\tilde{t}}_3}\) leads to the following ODE in \(z_3\):
with \({{\tilde{H}}} (\rho _3^*, \theta _3, y_3^*, z_3, {{\tilde{t}}}_3 ) {:}{=}H(\rho _3^*{\textrm{e}^{{\tilde{t}}_3}}, \theta _3, ( y_3^*- E^3 + z_3({\tilde{t}}_3) ) \textrm{e}^{-2{\tilde{t}}_3} + (c_3 / b_3) E^3 \textrm{e}^{-3{\tilde{t}}_3}, E \textrm{e}^{-{\tilde{t}}_3})\) and initial condition \(z_3(0) = 0\). One can show that \({{\tilde{H}}} \left( \rho _3^*, \theta _3, y_3^*, z_3, {{\tilde{t}}}_3\right) \) is uniformly bounded over \({{\tilde{t}}}_3 \in [0,T_3]\), so that integration gives
Changing variables back to \({{\tilde{y}}}_3\) and evaluating at \({{\tilde{t}}}_3 = T_3\) yields
and therefore
as required.
Now fix \(\alpha = 1\). The fact that \({\tilde{\theta }}_3(T_3) = {\mathcal {O}}(\ln {\rho _3^*}^{-1})\) follows from direct estimates using the boundedness of the right-hand side of the equation for \(\theta _3'\) and the expression for the transition time \(T_3\) in (57). It remains to bound \(y_3(T_3)\). Note that we cannot apply the same partial linearisation approach as we did for \(\alpha =2\), since \(\theta _3\) is dynamic (i.e. not constant) in \(\{\rho _3 = 0\}\). We can, however, obtain a coarser estimate via a more direct approach. Notice that for sufficiently small E we have \(y_3'\vert _{y_3 = -\nu } > 0\) and \(y_3'\vert _{y_3 = \nu } < 0\). It follows that \(\Pi _3^{(1)}\) is well-defined, since solutions are inflowing along the faces of \({\mathcal {D}}_3\) defined by \(\{y = \pm \nu \}\) for all \({{\tilde{t}}}_3 \in [0,T_3]\). Moreover, there exist constants \(\sigma _- < \sigma _+\) such that
for all \(y \in [-\nu ,\nu ]\) and \(\varepsilon _3 \in [0,E]\). Substituting \(\varepsilon _3({{\tilde{t}}}_3) = E \textrm{e}^{- {{\tilde{t}}}_3}\) and solving the first-order linear equations
we obtain lower and upper solutions on \({{\tilde{t}}}_3 \in [0,T_3]\) with the property that
Evaluating these expressions at \({{\tilde{t}}}_3 = T_3 = \ln (R/\rho _3^*)\) yields
\(\square \)
Note that systems (54) and (55) are orbitally equivalent. Since the result in Proposition 4.21 only depends on the initial condition in \(\Sigma _3^{{\text {in} }}\), and not on the transition time, it holds for both systems (54) and (55).
Remark 4.22
Similarly to the arguments used to describe the map \({\Pi _1^{(\alpha )}}\) in proof of Proposition 4.9, the arguments used to describe the map \({\Pi _3^{(\alpha )}}\) in Proposition 4.21 are (strictly speaking) only valid for initial conditions with \(\rho _3 \in (0,R]\). This is not problematic since we aim to derive results for \(\varepsilon > 0\). Moreover, \({\Pi _3^{(\alpha )}}\) can be smoothly and uniquely extended to \(\rho _3 = 0\).
4.5 Proof of Theorem 3.2
We now combine the results obtained in the charts \(K_1\), \(K_2\) and \(K_3\) in order to prove Theorem 3.2. The idea is to describe the extended map \({\pi _\varepsilon ^{(\alpha )}}: \Delta _\varepsilon ^{{\text {in} }} \rightarrow \Delta _\varepsilon ^{{\text {out} }}\) defined in Section 4.1, the first three components of which coincide with components of \({\pi ^{(\alpha )}}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\), via its preimage in the blown-up space:
This can be done explicitly using the change of coordinate maps \(\kappa _{ij}\) in Lemma 4.1 and the characterisation of \(\Pi _1^{(\alpha )}\), \(\Pi _2^{(\alpha )}\) and \(\Pi _3^{(\alpha )}\) in Propositions 4.9, 4.16 and 4.21, respectively. The geometry is sketched in Fig. 20.
In order to prove Assertions (a)–(c), we need to derive the form of the map \(\Pi ^{(\alpha )}\). Initial conditions \((r_1, \theta _1, R, \varepsilon _1) \in \Sigma _1^{{\text {in} }}\) are mapped to \(\Sigma _1^{{\text {out} }}\) under \(\Pi _1^{(\alpha )}\) as described by Proposition 4.9. Since \(\Sigma _2^{{\text {in} }} = \kappa _{12}(\Sigma _1^{{\text {out} }})\), we obtain the following input for the map \(\Pi _2^{(\alpha )}\):
where we recall that \(h_{\theta _1}^{(\alpha )}(r_1,\theta _1,\varepsilon _1) = {\tilde{h}}_{\theta _1}^{(\alpha )}(r_1,\theta _1,\varepsilon _1) \mod 1\),
and \(c_0 {:}{=}\int _0^1 c(\theta _1(t_1)) \, \textrm{d}t_1\). Using (64), Lemma 4.1 and Proposition 4.16, we obtain an expression for the input to the map \(\Pi _3^{(\alpha )}\), namely
where we used the fact that \(r_2 - r_{2,c} = {\mathcal {O}} ( \textrm{e}^{- {\tilde{\varrho }} / \varepsilon _1^3} )\) in the derivation of the third component in the right-hand side, and \(h_{\theta _2}^{(\alpha )}(r_2, \theta _2, \rho _2) = {{\tilde{h}}}_{\theta _2}^{(\alpha )}(r_2, \theta _2, \rho _2) \mod 1\) with
where \(c(\theta _2) = c\left( h_{\theta _1}^{(2)}(r_1,\theta _1,\varepsilon _1)\right) \). With regards to the third component in (66), if \(\alpha = 1\) then we have
where \(\nu >0\) is the constant appearing in the definition of \(\Sigma _2^{{\text {out} }}\) (recall Proposition 4.13). If \(\alpha = 2\), then by Lemma 4.17 it holds
where \({a(\theta _2)} = a\left( h_{\theta _1}^{({2})}(r_1,\theta _1,\varepsilon _1)\right) \), \({b(\theta _2)} = b\left( h_{\theta _1}^{({2})}(r_1,\theta _1,\varepsilon _1)\right) \) and \({c(\theta _2)} = c\left( h_{\theta _1}^{({2})}(r_1,\theta _1,\varepsilon _1)\right) \).
Substituting the right-most expression in (66) into the expression for \(\Pi _3^{(\alpha )}(\rho _3,\theta _3,y_3,E)\) in Proposition 4.21 yields an expression for \(\Pi ^{(\alpha )}(r_1,\theta _1,R,\varepsilon _1)\). We obtain
and specify the second and third components in the following. We have \(h_{\theta _3}^{(\alpha )}(\rho _3, \theta _3, y_3) = {{\tilde{h}}}_{\theta _3}^{(\alpha )}(\rho _3, \theta _3, y_3) \mod 1\), with
where we used (65) and (67) in order to obtain the right-hand side. It remains to specify the third component in the right-hand side of (68). If \(\alpha = 1\), we can use the bounds in (56) to estimate
for constants \(\nu >0\) and \(\sigma _-<\sigma _+\), such that \(h_{y_3}^{(1)}(\rho _3,\theta _3,y_3) = {\mathcal {O}}(\varepsilon _1^2)\). If \(\alpha = 2\), then
where
which follows from \(a(\theta _2) = a(h_{\theta _1}^{(2)}(r_1,\theta _1,\varepsilon _1))\), \(b(\theta _2) = b(h_{\theta _1}^{(2)}(r_1,\theta _1,\varepsilon _1))\), \(c(\theta _2) = c(h_{\theta _1}^{(2)}(r_1,\theta _1,\varepsilon _1))\) together with \({{\tilde{h}}}_{\theta _3}^{(2)}(\rho _3, \theta _3, y_3) = {{\tilde{h}}}_{\theta _1}^{(2)}(r_1,\theta _1,\varepsilon _1) + {\mathcal {O}}(\varepsilon _1 \ln \varepsilon _1^{-1})\).
Applying the blow-down transformations defined by the local coordinate formulae in (31) to (68) yields the map
for all \(\varepsilon \in (0,\varepsilon _0]\) (the limiting value \(\varepsilon = 0\) is omitted because the blow-down transformation is only defined for \(\varepsilon > 0\)). The estimates above ‘blow-down’ to those given in Assertion (b) in Theorem 3.2, since the map \(\pi \) is identified with \(\pi _\varepsilon \) after omitting the trivial component \(\varepsilon \mapsto \varepsilon \). Assertion (a) is a direct consequence of Assertion (b).

Global geometry and dynamics in the blown-up space projected into \(({{\bar{r}}}, {{\bar{y}}}, {{\bar{\varepsilon }}})\)-space. The three-dimensional manifold \(M^{{\text {a} }}\) which extends from \(\Delta _\varepsilon ^{{\text {in} }}\) up to \(\Delta _\varepsilon ^{{\text {out} }}\) (which are identified with \(\Sigma ^{{\text {in} }}_1\) and \(\Sigma ^{{\text {out} }}_3\), respectively) is shown again in shaded green. Theorem 3.2 is proven by combining results obtained in charts \(K_1\), \(K_2\) and \(K_3\): The flow from \(\Sigma _1^{{\text {in} }}\) to \(\Sigma _1^{{\text {out} }}\) is described by Proposition 4.9, the flow from \(\Sigma _2^{{\text {in} }}\) to \(\Sigma _2^{{\text {out} }}\) is described by Proposition 4.16, and the flow from \(\Sigma _3^{{\text {in} }}\) to \(\Sigma _3^{{\text {out} }}\) is described by Proposition 4.21 (Color figure online)
It remains to prove the strong contraction property in Assertion (c). This can be done by differentiating the expression for \(\Pi ^{(\alpha )}\). Letting \({\mathcal {Q}}^{(\alpha )} {:}{=}\Pi _3^{(\alpha )} \circ \kappa _{23} \circ \Pi _2^{(\alpha )} \circ \kappa _{12}\), we obtain
after applying the chain rule. Direct calculations using Lemma 4.1, Propositions 4.16 and 4.21 show that \((\partial {\mathcal {Q}}^{(\alpha )} / \partial r_1) (\Pi _1^{(\alpha )}(r_1, \theta _1, R, \varepsilon _1))\) is (at worst) algebraically growing in \(r_1\) and \(\varepsilon _1\). Since the second term \((\partial \Pi _1^{(\alpha )} / \partial r_1 )(r_1, \theta _1, R, \varepsilon _1)\) is exponentially small due to the strong contraction in \(K_1\), recall Proposition 4.9 Assertion (b), it follows that
for a constant \({\tilde{\varrho }} > 0\), assuming the constant E bounding \(\varepsilon _1\) is sufficiently small. Assertion (c) in Theorem 3.2 follows for all \(\varepsilon \in (0,\varepsilon _0]\) with \(\varepsilon _0\) sufficiently small after applying the blow-down transformation (in particular \(\varepsilon _1 = \varepsilon / R\)). \(\square \)
5 Applications
In this section we consider semi-oscillatory dynamics near folded limit cycle manifolds in two different applications. Specifically, we consider
-
1.
Periodically forced oscillators of Liénard type;
-
2.
A toy model ‘normal form’ for the study of tipping phenomena in climate systems proposed in Zhu et al. (2015).
The first of these will allow us to illustrate the application of the main results in Sect. 3. The second is an example of a model exhibiting a folded limit cycle bifurcation in the partial singular limit \(\varepsilon _1 > 0\), \(\varepsilon _2 \rightarrow 0\) (recall system (5)), which violates both Assumptions 1–2.
5.1 Periodically Forced Oscillators
Periodically forced oscillators in mechanical and electrical engineering can often be modelled using Liénard equations of the form
where \(A(\omega t) = A(\omega t + 1)\) for all \(t \in {\mathbb {R}}\), the friction/resistance function f(x) is smooth, and the parameters \(\mu \) and \(\omega \) determine the magnitude of the friction/resistance and the frequency of the (periodic) forcing term A, respectively.
Remark 5.1
A very well-known and historically important example of a Liénard equation is the van der Pol equation (van der Pol 1920, 1926). We refer to Burke et al. (2016), Guckenheimer et al. (2003), Haiduc (2008) for detailed geometric studies of the (local and global) dynamics of the periodically forced van der Pol equation in a number of frequency regimes.
We recast equation (70) as an autonomous dynamical system by (i) rescaling time via \(\tau = \mu ^{-1} t\), and (ii) introducing new variables via the Liénard transformation
where \(K(x) = - \int _0^x f(\xi ) \, \textrm{d}\xi \). This leads to
where the overdot denotes now differentiation with respect to \(\tau \). Exploiting the periodicity property \(A(s+1) = A(s)\) in order to replace s with an angular variable \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\) and rewriting the system on the (new) fast time-scale defined by \({{\tilde{t}}} = \mu ^{2} \tau \) leads to
where by a slight abuse of notation, we allow the dash to denote differentiation with respect to the new time \({{\tilde{t}}}\). Our analysis applies in particular scaling regimes with \(0 < {\mu ^{-1}\omega }, \mu ^{-2} \ll 1\). Specifically, we derive results for scaling regimes defined by
where \(\alpha \in {\mathbb {N}}_+\) and \(\vartheta > 0\) is a parameter such that \(\vartheta = {\mathcal {O}}(1)\) as \(\varepsilon \rightarrow 0\). Note that this is equivalent to considering the scaling regimes defined by
After one more change of time-scale \({{\hat{t}}} = \vartheta {{\tilde{t}}}\), our system becomes
where by a slight abuse of notation, we now allow the dash to denote differentiation with respect to the time \({{\hat{t}}}\). Finally, we assume the following properties of the functions K, g and A.
Assumption 3
There exists a point \(x_F\) such that
for all \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\).
Assumption 3 implies that the critical manifold, given by \(S_0 = \{ (x, \theta , K(x) ): x \in {\mathbb {R}}, \theta \in {\mathbb {R}}/ {\mathbb {Z}} \}\), contains a regular folded cycle \(S_0^{{\text {c} }} = \{ (x_F, \theta , K(x_F)): \theta \in {\mathbb {R}}/ {\mathbb {Z}} \}\). The set \(S_0^{{\text {c} }}\) can be moved to the ‘origin’ via the coordinate translation \(({{\tilde{x}}}, {{\tilde{y}}}) = (x - x_F, y - K(x_F))\), which yields the system
which is—up to relabelling \(({{\tilde{x}}}, {{\tilde{y}}}) \leftrightarrow (r,y)\)—in general form (22) with
all of which are strictly positive due to Assumption 3. Using the same relabelling, we define entry and exit sections \(\Delta ^{{\text {in} }}\) and \(\Delta ^{{\text {out} }}\) analogously to those in (23) and (24), respectively, and let \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) denote the transition map induced by the forward flow of system (73) for a given \(\alpha \in {\mathbb {N}}_+\).
Theorem 5.2
Consider system (73) with fixed \(\alpha \in {\mathbb {N}}_+\). There exists an \(\varepsilon _0 > 0\) such that for all \(\varepsilon \in (0, \varepsilon _0]\), the map \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) is described by Theorem 3.2 after relabelling \(({{\tilde{x}}}, {{\tilde{y}}}) \leftrightarrow (r,y)\). In particular, we have
where
and
Proof
This is a direct application of Theorem 3.2, using the notation of (73) and the identities in (74). \(\square \)
Note that via (71), the results in Theorem 5.2 can be reformulated and restated for the scaling regimes defined by (72). As for our main results in Sect. 3, the results for scalings corresponding to semi-oscillatory dynamics (\(\alpha \in \{1,2\}\)) cannot be obtained using established theory for two time-scale systems. These results are new, to the best of our knowledge, even for the forced van der Pol example (the intermediate frequency regime considered in Burke et al. (2016) covers the case \(\alpha = 3/2\)).
5.2 Tipping Phenomena in Climate Systems
The authors in Zhu et al. (2015) proposed the following simple normal form for studying early warning signs for saddle-node induced tipping in climate systems:
where \(0 < {\tilde{\delta }} \ll 1\) and the parameters \({\mathcal {A}}, \omega > 0\) determine the amplitude, frequency of the sinusoidal periodic forcing term, respectively. This can recast as an autonomous system of the form
where \(\theta \in {\mathbb {R}}/ {\mathbb {Z}}\). We shall be interested in the dynamics when \(0 < {\tilde{\delta }}, \omega \ll 1\), and in particular the semi-oscillatory case \(0 < {\tilde{\delta }} \ll \omega \ll 1\). In this case, system (75) is oscillatory with respect to the partial singular limit \(\omega > 0\), \({\tilde{\delta }} \rightarrow 0\), but stationary with respect to the double singular limit \((\omega , {\tilde{\delta }}) \rightarrow (0,0)\).
We are particularly interested in system (75) as a model example of a system which violates Assumptions 1–2.
Proposition 5.3
Consider system (75) with \(\omega > 0\) fixed and \(0 < {\tilde{\delta }} \ll 1\). This system has a regular fold of limit cycles at \(z = {{\tilde{a}}} = 0\). In particular, the necessary and sufficient conditions on the Poincaré map in (9) and (10) are satisfied; however, Assumptions 1 and 2 are not.
Proof
The fact that Assumptions 1–2 are violated follows from direct calculations on the system obtained from (75) in the partial singular limit \(\omega > 0\), \({\tilde{\delta }} \rightarrow 0\). The details are omitted for brevity.
In order to verify the existence of a regular fold of cycles, we derive an expression for the Poincaré map P induced on a section contained in the plane \(\{\theta = 0\}\). Using the fact that
we obtain
This expression can be used to check the necessary and sufficient conditions in (9) and (10) for a regular fold of cycles directly. \(\square \)
Our aim in what follows is to demonstrate that problems of this kind can (to a large extent) be analysed with existing theory for two time-scale systems. We shall restrict attention to scaling regimes defined by
where \(\nu = {\mathcal {O}}(1)\) as \(\varepsilon \rightarrow 0\) and \(\alpha \in {\mathbb {N}}_+\). We shall also simplify the fast equation by defining a new variable \(a {:}{=}{{\tilde{a}}} {-} {\mathcal {A}} \sin (2 \pi \theta )\). This leads to
The main results for this section will describe the dynamics of system (76). Letting \(\varepsilon \rightarrow 0\) yields the layer problem
The critical manifold is given by \(S_0 = \{ (z,\theta ,z^2): z \in {\mathbb {R}}, \theta \in {\mathbb {R}}/ {\mathbb {Z}} \}\), and the non-trivial eigenvalue of the linearisation along \(S_0\) is \(\lambda = - 2z\). This implies a folded critical manifold structure \(S_0 = S_0^{{\text {a} }} \cup S_0^{{\text {c} }} \cup S_0^{{\text {r} }}\), where \(S_0^{{\text {a} }} = S_0 \cap \{z > 0\}\) (\(S_0^{{\text {r} }} = S_0 \cap \{z < 0\}\)) is normally hyperbolic and attracting (repelling), and \(S_0^{{\text {c} }} = \{(0,\theta ,0): \theta \in {\mathbb {R}}/ {\mathbb {Z}} \}\) is of regular fold type.
The reduced problem on \(S_0\) will differ depending on the scaling, i.e. depending on the value of \(\alpha \). We are primarily interested in the cases \(\alpha \in \{1,2\}\), for which \(0 < { {\tilde{\delta }} \ll \omega } \ll 1\); see however Remark 5.8 below for the cases \(\alpha \ge 3\). Fixing \(\alpha \in \{1,2\}\), rewriting system (76) on the slow time-scale \(\tau = \varepsilon ^\alpha t\), and taking the limit \(\varepsilon \rightarrow 0\) yields the reduced problem
This leads to the following reduced vector field on \(S_0\), expressed in the \((z,\theta )\)-coordinate chart:
It is typical for problems of this kind to consider the so-called desingularised reduced problem (Kuehn 2015; Szmolyan and Wechselberger 2001; Wechselberger 2020). This may be obtained after a (singular) time transformation which amounts to multiplication of the vector field by z (see again Remark 2.2), leading to
System (80) is orbitally equivalent to system (79) on \(S_0 \setminus S_0^{{\text {c} }}\), but the orientation of orbits on \(S_0^{{\text {r} }}\) (where \(z < 0)\) is reversed. Direct calculations reveal the presence of two equilibria along \(S_0^{{\text {c} }}\), namely
which are of neutral folded saddle and folded centre type, respectively (see Szmolyan and Wechselberger 2001 for definitions), see Fig. 21. Moreover, system (80) is Hamiltonian, with Hamiltonian function
Except for the points \(p_s\) and \(p_c\), there are three different types of orbits shown in Fig. 21. These are identified in the following result.

Dynamics of the reduced problem (79) on \(S_0\), projected into the \((\theta ,z)\)-plane. We sketch the case with \({\mathcal {A}} = 2\) and \(R = 1\), where we recall that \(R > 0\) is the constant used to define \(\Delta ^{{\text {in} }}\). The normally hyperbolic and attracting (repelling) branch \(S_0^{{\text {a} }}\) (\(S_0^{{\text {r} }}\)) is indicated in shaded turquoise (grey). The fold cycle \(S_0^{{\text {c} }}\) which separates these two branches is sketched in blue. There are two folded singularities on \(S_0^{{\text {c} }}\): a neutral folded saddle \(p_s\), and a folded centre \(p_c\). The singular true and faux canards through \(p_s\) coincide in this case (denoted \(\gamma _c\) and shown in green), forming a limit cycle of period 2, and the region bounded outside of \(\gamma _c\) is foliated by periodic orbits of period 1. Finally, we sketch the forward evolution of an initial condition in \(\Delta ^{{\text {in} }} \cap {S_0^{{\text {a} }}}\) with initial angle \(\theta ^*\in {\mathcal {I}}\) (the interval \({\mathcal {I}}\) is shown in blue), i.e. inside the region bounded by \(\gamma _c\). Such points reach a regular jump point on \(S_0^{{\text {c} }}\) with angle \(\theta _e \in (3/4,1) \cup [0,1/4)\) in finite time. For \({\mathcal {A}} = 2\) and \(R = 1\) we have \(\theta _l = 5/12\), \(\theta _r = 1/12\). The initial condition in red has angle \(\theta ^*= 5/6\), for which our results imply a jump angle of \(\theta _e(\theta ^*) = {11/12}\) (Color figure online)
Lemma 5.4
Consider the reduced problem (79). Orbits are contained within constant level sets \(H(z,\theta ) = K \ge - {\mathcal {A}} / 2\), where
-
1.
\(K = - {\mathcal {A}} / 2\) corresponds to the folded centre \(p_c\).
-
2.
\(K \in (- {\mathcal {A}} / 2, {\mathcal {A}} / 2)\) correspond to orbits that connect to the folded cycle \(S_0^{{\text {c} }}\) in both forward and backward time.
-
3.
\(K = {\mathcal {A}} / 2\) corresponds to two saddle homoclinic orbits in the desingularised reduced problem (80), and a periodic orbit \(\gamma _c\) of period \(\tau = 2\) along the true and faux canards through the neutral folded saddle \(p_s\) in the reduced problem (79).
-
4.
\(K > {\mathcal {A}} / 2\) corresponds to periodic orbits of period \(\tau = 1\) outside of the region bounded by \(\gamma _c\).
Proof
This follows from direct calculations with the desingularised reduced problem (80) and a reversal of time on \(S_0^{{\text {r} }}\). \(\square \)
We can use the information obtained above to describe the local dynamics near \(S_0^{{\text {c} }}\). Specifically, we want to describe the transition map \(\pi ^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) induced by the forward flow of system (76), where
for small but fixed \(R, \beta , a_0 > 0\). A singular transition map \(\pi _0^{(\alpha )}: \Delta ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\) for \(\varepsilon = 0\) can be constructed explicitly, by concatenating solutions to the layer and reduced problems described above. If we choose \(R > 0\) so that
then \(\Delta ^{{\text {in} }} \cap S_0^{{\text {a} }}\) intersects the singular canard solution \(\gamma _c\) at the two points \((R,\theta _{l})\) and \((R,\theta _{r})\), where \(\theta _l \in (1/4, 3/4]\) and \(\theta _r \in [3/4, 0) \cup [0, 1/4)\) solve
see Fig. 21. Let \({\mathcal {I}} \subset {\mathbb {R}}/ {\mathbb {Z}}\) denote the interior of the interval between \(\theta _l\) and \(\theta _r\) which is contained within the region bounded by \(\gamma _c\). Different types of singular orbits can be constructed depending on whether or not one starts with an initial angle \(\theta \in {\mathcal {I}}\), \(\theta \in \{\theta _l, \theta _r\}\) or \(\theta \notin \overline{{\mathcal {I}}}\).
Consider an initial condition \((z^*, \theta ^*, R^2{ ) \in \Delta ^{{\text {in} }}}\) with \(\theta ^*\in {\mathcal {I}}\). This is mapped by the layer flow of system (77) to the point \((R, \theta ^*, R^2) \in \Delta ^{{\text {in} }} \cap S_0^{{\text {a} }}\). Since \(\theta ^*\in {\mathcal {I}}\), the point \((R, \theta ^*, R^2)\) lies on an orbit of the desingularised reduced problem (80) which is contained within a level curve \(H(z,\theta ) = K \in (-{\mathcal {A}}/2, {\mathcal {A}}/2)\). In fact, one can show directly that
Lemma 5.4 implies that the forward evolution of \((R, \theta ^*, R^2)\) under the reduced problem (79) reaches \(S_0^{{\text {c} }}\) at a regular jump point \((0,\theta _e(\theta ^*),0)\), where \(\theta _e(\theta ^*) \in (3/4, 1) \cup [0,1/4)\). In fact, the value of \(\theta _e\) can be calculated explicitly using
Note that the containment condition on the right ensures that \(\theta _e(\theta ^*)\) is uniquely determined, i.e. that the function \(\theta _e: {\mathcal {I}} \rightarrow (3/4,1) \cup [0,1/4)\) is well-defined. Since \((0,\theta _e(\theta ^*),0) \in S_0^{{\text {c} }}\) is a (classical) regular jump point, we can connect to the layer flow of system (77) and map it to the point \((-R, \theta _e(\theta ^*), 0) \in \Delta ^{{\text {out} }}\). Thus we have shown that for all initial conditions with \((z^*, \theta ^*, R^2)\) with \(\theta ^*\in {\mathcal {I}}\), the singular transition map is
where \(\theta _e(\theta ^*)\) is uniquely determined by expressions (82) and (83).
Now consider an initial condition \((z^*, \theta ^*, R^2{)\in \Delta ^{{\text {in} }}}\) with \(\theta ^*\notin {\mathcal {I}}\). In this case the point \((z^*, \theta ^*, R^2)\) is mapped via the layer flow to \((R, \theta ^*, R^2) \in S_0^{{\text {a} }}\), but this point lies on an orbit of the reduced problem with \(H(z,\theta ) \ge {\mathcal {A}}/2\). Specifically, if \(\theta ^*\in \{\theta _l, \theta _r\}\), then \((R, \theta ^*, R^2) \in \gamma _c\). The map \(\pi _0^{(\alpha )}\) is multi-valued in this case, since every point on \(\gamma _c \cap S_0^{{\text {r} }}\) can be concatenated with an orbit segment of the layer problem. In particular,
If \(\theta ^*\notin \overline{{\mathcal {I}}}\), then \((R, \theta ^*, R^2)\) lies on a periodic orbit of the reduced problem which is bounded above \(\gamma _c\). In this case solutions never leave \(S_0^{{\text {a} }}\), and the map \(\pi _0^{(\alpha )}\) is not defined.
The following result describes the perturbation of singular orbits with initial conditions in the sector defined by requiring that \(\theta \in {\mathcal {I}}\).
Proposition 5.5
Consider system (76) with \(\alpha \in \{1,2\}\), assume the constant R which defines \(\Delta ^{{\text {in} }}\) satisfies (81), and let
for a closed interval \({\mathcal {J}}_1 \subset {{\mathcal {I}}}\). There exists an \(\varepsilon _0 > 0\) such that for all \(\varepsilon \in (0,\varepsilon _0)\), the restricted map \({\tilde{\pi }}^{(\alpha )} {:}{=}\pi ^{(\alpha )}|_{{\tilde{\Delta }}^{{\text {in} }}}: {\tilde{\Delta }}^{{\text {in} }} \rightarrow {\Delta ^{{\text {out} }}}\) is well-defined and given by
where
\({\tilde{\pi }}^{(\alpha )} \rightarrow \pi _0^{(\alpha )}|_{{{\tilde{\Delta }}^{{\text {in} }}}}\) as \(\varepsilon \rightarrow 0\), and \(\theta _e(\theta )\) is uniquely determined by equations (82) and (83). Explicitly,
Proof
Consider the forward evolution of initial conditions \((z^*, \theta ^*, R^2) \in {{\tilde{\Delta }}^{{\text {in} }}}\) under system (76). By Fenichel theory, such solutions are initially attracted at an exponential rate to the Fenichel slow manifold \(S_\varepsilon ^{{\text {a} }}\) which perturbs from \(S_0^{{\text {a} }}\), after which they remain \({\mathcal {O}}(\varepsilon ^\alpha )\)-close to solutions of the reduced vector field induced by system (78) until reaching a neighbourhood of the regular jump point \((-R, \theta _e(\theta ^*),0)\). The local dynamics near \((-R, \theta _e(\theta ^*),0)\) are governed by the system
where \(\cos (2 \pi \theta _e(\theta ^*)) > 0\) since \(\theta _e(\theta ^*) \in (3/4, 1) \cup [0, 1/4)\). Direct calculations verify that this is a stationary two time-scale problem with a regular fold curve passing through the point \((0,\theta ^*,0)\). This observation allows for a derivation of the desired result using a slight adaptation of the well-known result in Szmolyan and Wechselberger (2004). \(\square \)
Proposition 5.5 describes regular jump-type dynamics for solutions with initial conditions in \({\tilde{\Delta }}^{{\text {in} }}\), which can be chosen arbitrarily close to \(\Delta ^{{\text {in} }}|_{\theta \in {\mathcal {I}}}\) by decreasing \(\varepsilon _0\) if necessary. It is worthy to note that the leading-order approximation for the ‘jump angle’ \({\tilde{\pi }}^{(\alpha )}_\theta (z, \theta , \varepsilon ) \sim \theta _e(\theta )\) can be calculated explicitly as a function of the initial angle using (84). It is also worthy to note that for \(\alpha \in \{1,2\}\) we have \({\tilde{\pi }}^{(\alpha )}_a(z,\theta ,\varepsilon ) = {\mathcal {O}}(\varepsilon ^{2\alpha /3})\), in contrast to the \({\mathcal {O}}(\varepsilon ^2)\) estimates for the parameter drift in Theorem 3.2. This is a consequence of the fact that the ‘parameter drift’ in system (76) in a occurs on the intermediate, rotational time-scale. This is not the case for systems satisfying Assumptions 1–2.
We may also consider the case in which initial conditions are chosen ‘higher up’, in an annular section
where the constant \(\rho > 0\) satisfies
c.f. equation (81). A subset of solutions with initial conditions in \(\Sigma ^{{\text {in} }}\) are described by the following result. We formulate it in terms of the transition map \(\Pi ^{(\alpha )}: \Sigma ^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}\).
Proposition 5.6
Consider system (76) with \(\alpha \in \{1,2\}\), assume the constant \(\rho \) which defines \(\Sigma ^{{\text {in} }}\) satisfies (85), and let
where \({\mathcal {J}}_2:= \left\{ \theta \in {\mathbb {R}}/ {\mathbb {Z}}: {T(\theta ,\varepsilon )} \in {\mathcal {J}}_1 \right\} \), where \({\mathcal {J}}_1 \subset {\mathcal {I}}\) is the interval from Proposition 5.5, and \({T(\theta ,\varepsilon )}\) is the minimal positive solution of the transcendental equation
Then there exists an \(\varepsilon _0 > 0\) such that for all \(\varepsilon \in (0,\varepsilon _0)\), the restricted transition map \({{{\widetilde{\Pi }}}^{(\alpha )} {:}{=}\Pi ^{(\alpha )}|_{{{\widetilde{\Sigma }}}^{{\text {in} }}}:}\) \({{{\widetilde{\Sigma }}}^{{\text {in} }} \rightarrow \Delta ^{{\text {out} }}}\) is given by
Proof
The idea is to consider \({{\widetilde{\Pi }}}^{(\alpha )}\) as a composition \({{\widetilde{\Pi }}}^{(\alpha )} = {\tilde{\pi }}^{(\alpha )} \circ {\hat{\pi }}^{(\alpha )}\), where \({\tilde{\pi }}^{(\alpha )}\) is the local transition map described in Proposition 5.5 above and \({\hat{\pi }}^{(\alpha )}: { {{\widetilde{\Sigma }}}^{{\text {in} }}} \rightarrow {\tilde{\Delta }}^{{\text {in} }}\). The \((\theta ',a')\) system decouples from system (76), and can be solved directly. We obtain
for all \(t \in {\mathbb {R}}\), where \(\theta ^*= \theta (0)\). The transition time \(T = {T(\theta ^*,\varepsilon )} > 0\) is determined implicitly as the first positive solution of \(a(T) = R^2\), i.e. of the transcendental equation (86). The estimate for z(T) follows from Fenichel theory, which implies that the attracting slow manifold \(S_\varepsilon ^{{\text {a} }}\) which perturbs from \(S_0^{{\text {a} }}\) can be written as a graph \(z = \varphi _\varepsilon (\theta , a) = \sqrt{a} + {\mathcal {O}}(\varepsilon ^\alpha )\) in this regime (normal hyperbolicity is guaranteed by the fact that \(a(t) \ge R^2 > 0\) for all \(t \in [0,{T(\theta ,\varepsilon )}]\)).
The preceding arguments imply that
Since the domain of \({\hat{\pi }}^{(\alpha )}\) is \({{\widetilde{\Sigma }}}^{{\text {in} }}\), we have that \(\theta (T) = \theta ({T(\theta ^*,\varepsilon )}) \in {\mathcal {J}}_1\), where \({\mathcal {J}}_1 \subset {\mathcal {I}}\) is the interval from Proposition 5.5. Thus the composition \({{\widetilde{\Pi }}}^{(\alpha )} = {\tilde{\pi }}^{(\alpha )} \circ {\hat{\pi }}^{(\alpha )}\) is well-defined and, using Proposition 5.5, given by (87). \(\square \)
Remark 5.7
Due to the transcendental nature of equation (86), a closed-form expression for the function \(T = {T(\theta ,\varepsilon )}\) can only be given in terms of special functions. Nevertheless, for any given \(\theta \), \({T(\theta ,\varepsilon )}\) be calculated to arbitrary precision with standard numerical methods (e.g. Newton or bisection methods).
Propositions 5.5 and 5.6 describe solutions of ‘regular jump type’, but they do not explain what happens to solutions with initial conditions in \(\Delta ^{{\text {in} }} {\setminus } {\mathcal {J}}_1\). This corresponds to a set of initial conditions that is ‘small’ in these sense that the diameter of the interval \([0,1) \setminus \overline{{\mathcal {I}}}\) tends to zero as \(R \rightarrow 0\), but for fixed \(R > 0\) it is still \({\mathcal {O}}(1)\) with respect to \(\varepsilon \rightarrow 0\). Moreover, this set contains solutions close to the singular canard \(\gamma _c\), which are expected to play an important role in determining the qualitative dynamics (Szmolyan and Wechselberger 2001). A detailed description of the dynamics in this case is left for future work.
Remark 5.8
For \(\alpha \ge 3\), the dynamics can be analysed and understood entirely with established theory for two time-scale systems. The case \(\alpha = 3\) is non-trivial, and features a degenerate bifurcation in the desingularised reduced problem as the folded saddle \(p_s\) and neutral folded centre \(p_c\) collide and annihilate at a particular value of the forcing \({\mathcal {A}} = {\mathcal {A}}_c > 0\). For \({\mathcal {A}} < {\mathcal {A}}_c\), the folded cycle \(S_0^{{\text {c} }}\) is regular, i.e. there are no folded singularities. For \(\alpha \ge 4\), \(S_0^{{\text {c} }}\) is always regular. A direct application of the results in Szmolyan and Wechselberger (2004) in this case yields an explicit expression for the transition map:
Remark 5.9
The local geometry and dynamics near the fold lines/circles in the forced van der Pol system considered in e.g. Burke et al. (2016), Guckenheimer et al. (2003), Haiduc (2008) are characterised by alternation of folded saddles and folded focus singularities, in contrast to the alternation of folded saddle and folded centre singularities in Fig. 21. Nevertheless, there are many similarities, including the fact that the image of \(S^{{\text {a} }}_\varepsilon \) on \(\Delta ^{{\text {out} }}\) is non-circular as \(\varepsilon \rightarrow 0\), due to the folded saddles. This feature, which is not present for the systems described by Theorem 3.2, is utilised in the construction of horseshoes in the forced van der Pol system (Haiduc 2008).
6 Summary and Outlook
GSPT is an established and powerful tool for the analysis of stationary fast–slow systems, particularly when combined with the blow-up method. The corresponding theory for oscillatory fast–slow systems which possess a limit cycle manifold instead of (or in addition to) a critical manifold is less developed, despite the fact that oscillatory systems are common in applications. One reason for this appears to be that the theory for stationary fast–slow systems, notably Fenichel–Tikhonov theory and the blow-up method, depend on quasi-equilibrium properties possessed by stationary but not oscillatory fast–slow systems. The main purpose of this article has been to show that both Fenichel–Tikhonov theory and the blow-up method can be applied to study the dynamics of a class of multiple time-scale systems with three or more time-scales, as long as the angular/rotational dynamics are sufficiently slow relative to the radial dynamics. The class of systems considered, namely those in general form (4), contains a ‘semi-oscillatory’ class of systems that are oscillatory with respect to the partial singular limit \(\varepsilon _1 > 0, \ \varepsilon _2 \rightarrow 0\), but stationary with respect to the double singular limit \((\varepsilon _1,\varepsilon _2) \rightarrow (0,0)\). Although our approach is not applicable in the purely oscillatory case, our analysis showed that Fenichel–Tikhonov theory and the blow-up method can be applied directly in the semi-oscillatory case.
More concretely, we focused on the dynamics near a (three time-scale) global singularity corresponding to a kind of folded cycle bifurcation in the layer problem obtained in the partial singular limit. In order to do so we derived a prototypical system for the three time-scale global singularity near the non-hyperbolic cycle \(S_0^{{\text {c} }}\), recall Proposition 2.5, and studied the transition map induced by the flow. Our main result is Theorem 3.2, which is stated for system (22), which provides a rigorous characterisation of the asymptotic and strong contraction properties of the flow near \(S_0^{{\text {c} }}\). The asymptotics \(h_y^{(\alpha )}(\theta ,\varepsilon ) = {\mathcal {O}}(\varepsilon ^2)\) and the strong contraction property are the same as for the stationary regular fold point studied in Krupa and Szmolyan (2001a), Mishchenko et al. (1975), Szmolyan and Wechselberger (2004), not only in the semi-oscillatory cases \(\alpha \in \{1,2\}\) considered herein in detail, but for all \(\alpha \in {\mathbb {N}}_+\). The semi-oscillatory cases \(\alpha \in \{1,2\}\) are distinguished from the cases \(\alpha \ge 3\) by the fact that the leading-order estimates for \(h_y^{(\alpha )}(\theta ,\varepsilon )\) are, in general, non-constant functions of \(\theta \). We derived an explicit expression for the leading-order estimate in terms of the functions \(a(\theta )\), \(b(\theta )\) and \(c(\theta )\) appearing in system (22) when \(\alpha = 2\) in particular. In addition, we provided detailed estimates for the exit angle, recall (25), as well as estimates for the total number of rotations about the y-axis as solutions traverse the region between \(\Delta ^{{\text {in} }}\) and \(\Delta ^{{\text {out} }}\), recall Corollary 3.3. Theorem 3.2 is proved using the blow-up method in Sect. 4, thereby demonstrating the applicability of geometric blow-up techniques to study global singularities of limit cycle type in suitable classes of three time-scale systems. We focused on a detailed presentation of the proof in the semi-oscillatory cases \(\alpha \in \{1,2\}\). The proof for \(\alpha \ge 3\) can be obtained either via straightforward adaptations of the proof for \(\alpha = 2\), or via straightforward adaptations of the proof of the established results for two time-scale systems in Krupa and Szmolyan (2001a), Mishchenko et al. (1975), Szmolyan and Wechselberger (2004). The primary complication in cases \(\alpha \in \{1,2\}\) stems from the fact that the dynamics remain ‘global’ in \(\theta \) after blow-up near \(S_0^{{\text {c} }}\). Consequently, one has to consider a blow-up of the entire cycle (as opposed to a local blow-up about a point on \(S_0^{{\text {c} }}\)). We also demonstrated the applicability of our results by using them to derive detailed geometric and asymptotic information about the passage through a folded cycle singularity in a class of periodically forced Liénard equations; recall Sect. 5.1 and in particular Theorem 5.2. Finally, in Sect. 5.2, we considered a toy model for the study of tipping phenomena. Due to the periodic forcing in the fast equation, this model violates both of our primary Assumptions 1–2. The partial geometric analysis presented herein provides reason to argue that cases of this kind can for the most part be analysed using classical two time-scale theory.
In summary, the current manuscript provides a precedent for the effectiveness of stationary methods including Fenichel–Tikhonov theory and the blow-up method in semi-oscillatory multiple time-scale systems with at least three time-scales. There are many interesting directions which one might take from here. Our analysis of the toy model for tipping considered in Sect. 5.2 is incomplete and motivates the analysis of a more general class of systems with regular folded cycle manifolds which violate our main Assumptions 1–2. One might also consider the applicability of the methods developed herein for other global cycle singularities for which there is no direct and lower-dimensional analogue in stationary fast–slow systems, e.g. near a non-hyperbolic flip/period-doubling-type cycle in three time-scale systems of form (4). We also expect the detailed estimates on the local dynamics near regular folded cycles in Theorem 3.2 to play an important role in the description of multi-scale oscillations which involve regular folded cycles as a key ingredient. In Szmolyan and Wechselberger (2004), the authors derive a detailed characterisation of the local dynamics near a regular fold curve using geometric blow-up and combine it with Fenichel theory in order to derive the form of the Poincaré map associated to prototypical 1-fast 2-slow systems with an S-shaped critical manifold. These results were used to prove the existence of an invariant torus for a certain parameter regime in the forced van der Pol equation, which contains an attracting relaxation oscillation if a particular circle map induced on the angular variable is contracting. We conjecture that similar constructions could be applied to the three time-scale semi-oscillatory systems considered herein, under suitable assumptions on the global geometry. The details of these and other related problems are left for future work.
Data Availability
No datasets were generated or analysed during the current study.
References
Anosova, O.D.: On invariant manifolds in singularly perturbed systems. J. Dyn. Control Syst. 5, 501–507 (1999)
Anosova, O.D.: Invariant manifolds in singularly perturbed systems. Trudy Matematicheskogo Instituta Imeni VA Steklova 236, 27–32 (2002)
Baesens, C.: Slow sweep through a period-doubling cascade: delayed bifurcations and renormalisation. Phys. D 53, 319–375 (1991)
Baesens, C.: Gevrey series and dynamic bifurcations for analytic slow–fast mappings. Nonlinearity 8, 179 (1995)
Baspinar, E., Avitabile, D., Desroches, M.: Canonical models for torus canards in elliptic bursters. Chaos Interdiscip. J. Nonlinear Sci. 31, 063129 (2021)
Benes, G.N., Barry, A.M., Kaper, T.J., Kramer, M.A., Burke, J.: An elementary model of torus canards. Chaos Interdiscip. J. Nonlinear Sci. 21, 023131 (2011)
Bertram, R., Butte, M.J., Kiemel, T., Sherman, A.: Topological and phenomenological classification of bursting oscillations. Bull. Math. Biol. 57, 413–439 (1995)
Burke, J., Desroches, M., Granados, A., Kaper, T.J., Krupa, M., Vo, T.: From canards of folded singularities to torus canards in a forced van der Pol equation. J. Nonlinear Sci. 26, 405–451 (2016)
Cardin, P., da Silva, P., Teixeira, M.: Three time scale singular perturbation problems and nonsmooth dynamical systems. Q. Appl. Math. 72, 673–687 (2014)
Cardin, P.T., Teixeira, M.A.: Fenichel theory for multiple time scale singular perturbation problems. SIAM J. Appl. Dyn. Syst. 16, 1425–1452 (2017)
Cartwright, M.L., Littlewood, J.E.: On non-linear differential equations of the second order II. Ann. Math. pp. 472–492 (1947)
De Maesschalck, P., Kutafina, E., Popović, N.: Three time-scales in an extended Bonhoeffer–van der Pol oscillator. J. Dyn. Differ. Equ. 26, 955–987 (2014)
Desroches, M., Burke, J., Kaper, T.J., Kramer, M.A.: Canards of mixed type in a neural burster. Phys. Rev. E 85, 021920 (2012)
Desroches, M., Kirk, V.: Spike-adding in a canonical three-time-scale model: superslow explosion and folded-saddle canards. SIAM J. Appl. Dyn. Syst. 17, 1989–2017 (2018)
Dumortier, F., Roussarie, R.: Canard cycles and center manifolds, no. 577 in Memoirs of the American Mathematical Society, American Mathematical Society (1996)
Ermentrout, B., Terman, D.H.: Mathematical Foundations of Neuroscience, vol. 35. Springer, Berlin (2010)
Fenichel, N.: Geometric singular perturbation theory for ordinary differential equations. J. Differ. Equ. 31, 53–98 (1979)
Fruchard, A., Schäfke, R.: A survey of some results on overstability and bifurcation delay. Discrete Contin. Dyn. Syst. S 2, 931 (2009)
Grasman, J.: Asymptotic Methods for Relaxation Oscillations and Applications. Springer, Berlin (1987)
Guckenheimer, J.: Towards a global theory of singularly perturbed dynamical systems. In: Nonlinear Dynamical Systems and Chaos. Springer, pp. 213–225 (1996)
Guckenheimer, J., Hoffman, K., Weckesser, W.: The forced forced van der Pol equation i: the slow flow and its bifurcations. SIAM J. Appl. Dyn. Syst. 2, 1–35 (2003)
Guckenheimer, J., Tien, J.H., Willms, A.R.: Bifurcations in the fast dynamics of neurons: implications for bursting. In: Bursting: The Genesis of Rhythm in the Nervous System. World Scientific, pp. 89–122 (2005)
Haiduc, R.: Horseshoes in the forced van der pol system. Nonlinearity 22, 213 (2008)
Il’yashenko, Y.: Embedding theorems for local maps, slow–fast systems and bifurcation from Morse-Smale to Smale-Williams. Transl. Am. Math. Soc. Ser. 2(180), 127–140 (1997)
Il’yashenko, Y.S., Yakovenko, S.Y.: Finitely-smooth normal forms of local families of diffeomorphisms and vector fields. Russ. Math. Surv. 46, 1 (1991)
Jalics, J., Krupa, M., Rotstein, H.G.: Mixed-mode oscillations in a three time-scale system of ODEs motivated by a neuronal model. Dyn. Syst. 25, 445–482 (2010)
Jardón-Kojakhmetov, H., Kuehn, C.: A survey on the blow-up method for fast–slow systems. Contemp. Math. 775, 115–160 (2021)
Jelbart, S., Kuehn, C.: Discrete geometric singular perturbation theory. Discrete Contin. Dyn. Syst. 43, 57–120 (2023)
Jelbart, S., Kuehn, C.: Extending discrete geometric singular perturbation theory to non-hyperbolic points, arXiv preprint arXiv:2308.06141 (2023)
Jones, C.K.: Geometric singular perturbation theory. In: Dynamical systems, vol. 1609 of Lecture Notes in Mathematics. Springer, pp. 44–118 (1995)
Kaklamanos, P., Popović, N.: Complex oscillatory dynamics in a three-timescale El Niño southern oscillation model, arXiv preprint arXiv:2207.03230 (2022)
Kaklamanos, P., Popović, N., Kristiansen, K.U.: Bifurcations of mixed-mode oscillations in three-timescale systems: an extended prototypical example. Chaos Interdiscip. J. Nonlinear Sci. 32, 013108 (2022)
Kaklamanos, P., Popović, N., Kristiansen, K.U.: Geometric singular perturbation analysis of the multiple-timescale Hodgkin–Huxley equations. SIAM J. Appl. Dyn. Syst. 22, 1552–1589 (2023)
Kirillov, S.Y., Nekorkin, V.: Dynamic saddle-node bifurcation of the limit cycles in the model of neuronal excitability. Radiophys. Quantum Electron. 57, 837–847 (2015)
Kosiuk, I., Szmolyan, P.: Geometric singular perturbation analysis of an Autocatalator model. Discrete Contin. Dyn. Syst. 2, 783–806 (2009)
Kosiuk, I., Szmolyan, P.: Scaling in singular perturbation problems: blowing up a relaxation oscillator. SIAM J. Appl. Dyn. Syst. 10, 1307–1343 (2011)
Kosiuk, I., Szmolyan, P.: Geometric analysis of the Goldbeter minimal model for the embryonic cell cycle. J. Math. Biol. 72, 1337–1368 (2016)
Kramer, M.A., Traub, R.D., Kopell, N.J.: New dynamics in cerebellar purkinje cells: torus canards. Phys. Rev. Lett. 101, 068103 (2008)
Kristiansen, K.U., Szmolyan, P.: Relaxation oscillations in substrate-depletion oscillators close to the nonsmooth limit. Nonlinearity 34, 1030 (2021)
Kruff, N., Walcher, S.: Coordinate–independent singular perturbation reduction for systems with three time scales. Math. Biosci. Eng. 16, 5062–5091 (2019)
Krupa, M., Popović, N., Kopell, N.: Mixed-mode oscillations in three time-scale systems: a prototypical example. SIAM J. Appl. Dyn. Syst. 7, 361–420 (2008)
Krupa, M., Szmolyan, P.: Extending geometric singular perturbation theory to nonhyperbolic points–fold and canard points in two dimensions. SIAM J. Math. Anal. 33, 286–314 (2001)
Krupa, M., Szmolyan, P.: Extending slow manifolds near transcritical and pitchfork singularities. Nonlinearity 14, 1473 (2001)
Krupa, M., Szmolyan, P.: Relaxation oscillation and canard explosion. J. Differ. Equ. 174, 312–368 (2001)
Kuehn, C.: Multiple Time Scale Dynamics, vol. 191 of Applied Mathematical Sciences. Springer (2015)
Kuehn, C., Berglund, N., Bick, C., Engel, M., Hurth, T., Iuorio, A., Soresina, C.: A general view on double limits in differential equations. Phys. D 431, 133105 (2022)
Kuehn, C., Szmolyan, P.: Multiscale geometry of the Olsen model and non-classical relaxation oscillations. J. Nonlinear Sci. 25, 583–629 (2015)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory, vol. 112 of Applied Mathematical Sciences. Springer (2013)
Letson, B., Rubin, J.E., Vo, T.: Analysis of interacting local oscillation mechanisms in three-timescale systems. SIAM J. Appl. Math. 77, 1020–1046 (2017)
Lizarraga, I., Rink, B., Wechselberger, M.: Multiple timescales and the parametrisation method in geometric singular perturbation theory. Nonlinearity 34, 4163 (2021)
Mishchenko, E., Rozov, N.K.H.: Differential equations with small parameters and relaxation oscillations, Nauka, Moscow (transl.: Plenum Press, New York, 1980) (1975)
Nan, P., Wang, Y., Kirk, V., Rubin, J.E.: Understanding and distinguishing three-time-scale oscillations: case study in a coupled Morris–Lecar system. SIAM J. Appl. Dyn. Syst. 14, 1518–1557 (2015)
Nipp, K., Stoffer, D.: Invariant manifolds in discrete and continuous dynamical systems, vol. 21 of EMS Tracts in Mathematics, European Mathematical Society (2013)
Nipp, K., Stoffer, D., Szmolyan, P.: Graph transform and blow-up in singular perturbations. In: AIP Conference Proceedings, American Institute of Physics, pp. 861–868 (2009)
Pontryagin, L.S., Rodygin, L.V.: Approximate solution of a system of ordinary differential equations involving a small parameter in the derivatives. In: Doklady Akademii Nauk, vol. 131(2). Russian Academy of Sciences, pp. 255–258 (1960)
Rinzel, J.: A formal classification of bursting mechanisms in excitable systems. In: Mathematical Topics in Population Biology, Morphogenesis and Neurosciences, pp. 267–281. Springer (1987)
Roberts, K.-L., Rubin, J.E., Wechselberger, M.: Averaging, folded singularities, and torus canards: explaining transitions between bursting and spiking in a coupled neuron model. SIAM J. Appl. Dyn. Syst. 14, 1808–1844 (2015)
Szmolyan, P., Wechselberger, M.: Canards in \(\mathbb{R} ^3\). J. Differ. Equ. 177, 419–453 (2001)
Szmolyan, P., Wechselberger, M.: Relaxation oscillations in \(\mathbb{R} ^3\). J. Differ. Equ. 200, 69–104 (2004)
Tikhonov, A.N.: Systems of differential equations containing small parameters in the derivatives. Matematicheskii Sbornik 73, 575–586 (1952)
van der Pol, B.: A theory of the amplitude of free and forced triode vibrations. Radio Rev. 1, 701–710 (1920)
van der Pol, B.: On “relaxation-oscillations’’. Lon. Edinb. Dublin Philos. Mag. J. Sci. 2, 978–992 (1926)
Vo, T.: Generic torus canards. Phys. D 356, 37–64 (2017)
Wechselberger, M.: Geometric singular perturbation theory beyond the standard form. In: Frontiers in Applied Dynamical Systems: Reviews and Tutorials. Springer (2020)
Wiggins, S.: Normally Hyperbolic Invariant Manifolds in Dynamical Systems, vol. 105. Springer, Berlin (1994)
Zhu, J., Kuske, R., Erneux, T.: Tipping points near a delayed saddle node bifurcation with periodic forcing. SIAM J. Appl. Dyn. Syst. 14, 2030–2068 (2015)
Acknowledgements
SJ, CK and SVK acknowledge funding from the SFB/TRR 109 Discretization and Geometry in Dynamics, i.e. Deutsche Forschungsgemeinschaft (DFG—German Research Foundation)—Project-ID 195170736 - TRR109. CK thanks the VolkswagenStiftung for support via a Lichtenberg Professorship. SVK also acknowledges funding from the DFG priority program SPP 2298 Theoretical Foundations of Deep Learning as well as the Munich Data Science Institute. SJ, CK and SVK would also like to thank an anonymous referee for valuable feedback and suggestions, which led to significant improvements in the article.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests.
Additional information
Communicated by Anthony Bloch.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jelbart, S., Kuehn, C. & Kuntz, SV. Geometric Blow-Up for Folded Limit Cycle Manifolds in Three Time-Scale Systems. J Nonlinear Sci 34, 17 (2024). https://doi.org/10.1007/s00332-023-09987-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00332-023-09987-x
Keywords
- Geometric singular perturbation theory
- Global fast–slow systems
- Three time-scale systems
- Geometric blow-up
- Limit cycle bifurcations