
Abstract
We consider the numerical investigation of surface bound orientational order using unit tangential vector fields by means of a gradient flow equation of a weak surface Frank–Oseen energy. The energy is composed of intrinsic and extrinsic contributions, as well as a penalization term to enforce the unity of the vector field. Four different numerical discretizations, namely a discrete exterior calculus approach, a method based on vector spherical harmonics, a surface finite element method, and an approach utilizing an implicit surface description, the diffuse interface method, are described and compared with each other for surfaces with Euler characteristic 2. We demonstrate the influence of geometric properties on realizations of the Poincaré–Hopf theorem and show examples where the energy is decreased by introducing additional orientational defects.








Similar content being viewed by others


Notes
In the spherical harmonics method, the functions are complex-valued, and thus, we need a complex \(L^2\) inner product. For all real-valued functions, the complex conjugation can be ignored.
Here, we use lower indices to denote the components of a vector, not to mix up with the covariant indices used in the context of differential geometry.
Abbreviations
- div:
-
Surface divergence
- grad:
-
Surface gradient
- rot:
-
Surface curl
- \(\Delta _{\mathcal {S}}\) :
-
Surface Laplace–Beltrami operator
- \(\varvec{\Delta }^{\text {dR}}\) :
-
Surface Laplace–deRham operator
- e :
-
Edge, \(e\in \mathcal {E}\)
- \(\star e\) :
-
Dual edge of e (Voronoi edge)
- \(\mathcal {E}\) :
-
Set of edges, with number \(|\mathcal {E}|\)
- e :
-
Edge vector along edge e
- \(\mathbf{e}_{\star }\) :
-
Dual edge vector along dual chain \(\star e\)
- T :
-
Face, \(T\in \mathcal {T}\)
- \(\mathcal {T}\) :
-
Set of faces, with number \(|\mathcal {T}|\)
- \(*\) :
-
Hodge star operator
- \(\flat \) :
-
Lowering indices
- \(\sharp \) :
-
Rising indices
- \({\varvec{\alpha }}\) :
-
1-Form, \({\varvec{\alpha }}\in \varLambda ^{1} (\mathcal {S})\)
- \(\alpha _{h}\) :
-
Discrete 1-form, \(\alpha _{h}\in \varLambda _{h}^{1}(\mathcal {K})\)
- \(\underline{\varvec{\alpha }}\) :
-
Primal-dual 1-form, \(\underline{\varvec{\alpha }}=(\alpha _{h}, *\alpha _{h})\)
- \(\mathcal {K}\) :
-
Simplicial complex
- v :
-
Vertex, \(v\in \mathcal {V}\)
- \(\star v\) :
-
Dual vertex (voronoi cell)
- \(\mathcal {V}\) :
-
Set of vertices, with number \(|\mathcal {V}|\)
- d :
-
Exterior derivative
- \(\varGamma _{ij}^{k}\) :
-
Christoffel symbols of second kind
- \(\theta \) :
-
Colatitude coordinate, \(\theta \in [0,\pi ]\)
- \(\varphi \) :
-
Azimuthal coordinate, \(\varphi \in [0, 2\pi )\)
- \(\xi \) :
-
Coordinate in normal direction of the surface
- \(\kappa \) :
-
Gaussian curvature
- \(\mathcal {H}\) :
-
Mean curvature \(\mathcal {H}=\mathrm{div}\,\varvec{\nu }\)
- \(\Omega \) :
-
Domain, \(\Omega \subset \mathbb {R}^{3}\)
- \(E_{IJK}\) :
-
Levi–Civita symbols
- \(\mathbf {g}\) :
-
Riemannian metric tensor
- \(|\mathbf{g}|\) :
-
Determinant of g
- \(\pi \) :
-
Coordinate projection \(\pi :\Omega _\delta \rightarrow \mathcal {S}\)
- \(\pi _{\mathsf {T}\mathcal {S}}\) :
-
Surface projection \(\pi _{\mathsf {T}\mathcal {S}}:\mathsf {T}\mathbb {R}^3\rightarrow \mathsf {T}\mathcal {S}\)
- \(\mathcal {B}\) :
-
Shape operator \(\mathcal {B}=-\mathrm{grad}\,\varvec{\nu }\)
- \(\mathcal {S}\) :
-
Surface, i.e., compact closed oriented Riemannian 2-dim. manifold
- \(\chi ( \mathcal {S})\) :
-
Characteristic of the surface \(\mathcal {S}\)
- \(\mathcal {S}^{E}\) :
-
Ellipsoidal surface
- \(\varvec{\nu }\) :
-
Outer surface normal
- \(\mathbb {S}^{2}\) :
-
Unit 2-sphere
- \(\mathsf {T}\mathcal {S}\) :
-
Tangent bundle of surface \(\mathcal {S}\)
- \(\mathsf {T}^{*}\mathcal {S}\) :
-
Cotangent bundle of surface \(\mathcal {S}\)
- K :
-
Uniform Frank constant
- \(\omega _{n}\) :
-
Penalty constant for normality
- \(\omega _{t}\) :
-
Penalty constant for tangentiality
- \({F}_\mathrm {\omega _\mathrm{n}}^\mathcal {S}\) :
-
Weak surface Frank–Oseen energy
- \(\epsilon _\mathrm{f}\) :
-
Error in the defect fusion time
- \(\epsilon _\mathrm{e}\) :
-
(Normalized) Mean energy error
- \(t_{k}\) :
-
Discrete time step
- \(\tau _k\) :
-
Time step width in the kth time step
- \(\phi \) :
-
Phase-field variable
- \(\delta _{\mathcal {S}}\) :
-
Surface delta function
- W :
-
Double well, \(W(\phi )\simeq \delta _\mathcal {S}\)
- \(\zeta \) :
-
Double-well regularization
- \(\varepsilon \) :
-
Interface thickness of phase field
- \(d_\mathcal {S}(\mathbf {x})\) :
-
Signed-distance function
References
Abraham, R., Marsden, J.E., Ratiu, T.S.: Manifolds, Tensor Analysis, and Applications, No. Bd. 75 in Applied Mathematical Sciences. Springer, New York (1988)
Ahmadi, A., Marchetti, M.C., Liverpool, T.B.: Hydrodynamics of isotropic and liquid crystalline active polymer solutions. Phys. Rev. E 74, 061913 (2006)
Aland, A., Boden, S., Hahn, A., Klingbeil, F., Weismann, M., Weller, S.: Quantitative comparison of Taylor flow simulations based on sharp- and diffuse-interface models. Int. J. Numer. Methods Fluids 73, 344–361 (2013)
Aland, S., Lowengrub, J., Voigt, A.: Two-phase flow in complex geometries: a diffuse domain approach. Comput. Model. Eng. Sci. 57, 77–108 (2010)
Aland, S., Lowengrub, J., Voigt, A.: A continuum model for colloid-stabilized interfaces. Phys. Fluids 23, 062103 (2011)
Aland, S., Rätz, A., Röger, M., Voigt, A.: Buckling instability of viral capsides—a continuum approach. Multiscale Model Simul. 10, 82–110 (2012)
Arnold, D.N., Falk, R.S., Winther, R.: Finite element exterior calculus, homological techniques, and applications. Acta Numer. 15, 1–155 (2006)
Arnold, D.N., Falk, R.S., Winther, R.: Finite element exterior calculus: from Hodge theory to numerical stability. Bull. Am. Math. Soc. 47, 281–354 (2010)
Backofen, R., Gräf, M., Potts, D., Praetorius, S., Voigt, A., Witkowski, T.: A continuous approach to discrete ordering on \(\mathbb{S}^2\). Multiscale Model. Simul. 9, 314–334 (2011)
Backus, G.E.: Potentials for tangent tensor fields on spheroids. Arch. Ration. Mech. Anal. 22, 210–252 (1966)
Ball, J.M.: Mathematics and liquid crystals. Mol. Cryst. Liq. Cryst. 647, 1–27 (2017). doi:10.1080/15421406.2017.1289425
Ball, J.M., Zarnescu, D.A.: Orientability and energy minimization in liquid crystal models. Arch. Ration. Mech. Anal. 202, 493–535 (2011)
Barrera, R.G., Estevez, G.A., Giraldo, J.: Vector spherical harmonics and their application to magnetostatics. Eur. J. Phys. 6, 287 (1985)
Bertalmio, M., Cheng, L.T., Osher, S., Sapiro, G.: Variational problems and partial differential equations on implicit surfaces. J. Comput. Phys. 174, 759–780 (2001)
Blumberg Selinger, R.L., Konya, A., Travesset, A., Selinger, J.V.: Monte Carlo studies of the XY model on two-dimensional curved surfaces. J. Phys. Chem. B 115, 13989–13993 (2011)
Bois, J.S., Jülicher, F., Grill, S.W.: Pattern formation in active fluids. Phys. Rev. Lett. 106, 028103 (2011)
Bornemann, F., Rasch, C.: Finite-element discretization of static Hamilton-Jacobi equations based on a local variational principle. Comput. Vis. Sci. 9, 57–69 (2006)
Boyd, J.: Chebyshev and Fourier Spectral Methods, Dover Books on Mathematics, Second Revised edn. Dover Publications, New York (2001)
Burger, M., Stöcker, C., Voigt, A.: Finite element-based level set methods for higher order flows. J. Sci. Comput. 35, 77–98 (2008)
Calhoum, D., Helzel, C., LeVeque, R.: Logically rectangular grids and finite volume methods for PDEs in circular and spherical domains. SIAM Rev. 50, 723–752 (2008)
Chen, Y.: The weak solutions to the evolution problems of harmonic maps. Math. Zeitschr. 201, 69–74 (1989)
Desbrun, M., Hirani, A.N., Leok, M., Marsden, J.E.: Discrete Exterior Calculus, arXiv Preprint, arXiv:math/0508341 (2005)
Duduchava, L.R., Mitrea, D., Mitrea, M.: Differential operators and boundary value problems on hypersurfaces. Math. Nachr. 279, 996–1023 (2006)
Dziuk, G.: Finite elements for the Beltrami operator on arbitrary surfaces. In: Hildebrandt, S., Leis, R. (eds.) Partial differential equations and calulus of variations. Lecture Notes in Mathematics, vol. 1357, p. 142. Springer, Berlin (1988)
Dziuk, G., Elliott, C.M.: Finite elements on evolving surfaces. IMA J. Numer. Anal. 27, 261 (2007)
Dziuk, G., Elliott, C.M.: Surface finite elements for parabolic equations. J. Comput. Math. 25, 385 (2007)
Dziuk, G., Elliott, C.M.: Eulerian finite element method for parabolic PDEs on implicit surfaces. Interface Free Bound. 10, 119 (2008)
Dziuk, G., Elliott, C.M.: Finite element methods for surface PDEs. Acta Numer. 22, 289–396 (2013)
Eilks, C., Elliott, C.M.: Numerical simulation of dealloying by surface dissolution via the evolving surface finite element method. J. Chem. Phys. 227, 9727–9741 (2008)
Fengler, M., Freeden, W.: A nonlinear Galerkin scheme involving vector and tensor spherical harmonics for solving the incompressible Navier–Stokes equation on the sphere. SIAM J. Sci. Comput. 27, 967–994 (2005)
Frank, F.C.: I. Liquid crystals. On the theory of liquid crystals. Discuss. Faraday Soc. 25, 19–28 (1958)
Freeden, W., Gervens, T., Schreiner, M.: Tensor spherical harmonics and tensor spherical splines. Manuscr. Geod. 19, 80–100 (1994)
Freeden, W., Schreiner, M.: Spherical Functions of Mathematical Geosciences—A Scalar, Vectorial, and Tensorial Setup. Advances in Geophysical and Environmental Mechanics and Mathematics. Springer, Berlin (2009)
Freund, R.W.: A transpose-free quasi-minimal residual algorithm for non-Hermitian linear systems. SIAM J. Sci. Comput. 14, 470–482 (1993)
Greer, J., Bertozzi, A.L., Sapiro, G.: Fourth order partial differential equations on general geometries. J. Chem. Phys. 216, 216 (2006)
Hesthaven, J.S., Gottlieb, S., Gottlieb, D.: Spectral Methods for Time-Dependent Problems. Cambridge Monographs on Applied and Computational Mathematics, vol. 21. Cambridge University Press, Cambridge (2007)
Hirani, A.N.: Discrete Exterior Calculus. Ph.D. thesis, California Institute of Technology, Pasadena, CA, USA (2003)
Iyer, G., Xu, X., Zarnescu, D.A.: Dynamic cubic instability in a 2D Q-tensor model for liquid crystals. Math. Model. Methods Appl. Sci. 25, 1477–1517 (2015)
Koning, V., Lopez-Leon, T., Fernandez-Nieves, A., Vitelli, V.: Bivalent defect configurations in inhomogeneous nematic shells. Soft Matter 9, 4993–5003 (2013)
Kostelec, P.J., Maslen, D.K., Healy, D.M.J., Rockmore, D.N.: Computational harmonic analysis for tensor fields on the two-sphere. J. Comput. Phys. 162, 514–535 (2000)
Kralj, S., Rosso, R., Virga, E.G.: Curvature control of valence on nematic shells. Soft Matter 7, 670–683 (2011)
Kruse, K., Joanny, J.F., Jülicher, F., Prost, J., Sekimoto, K.: Asters, vortices, and rotating spirals in active gels of polar filaments. Phys. Rev. Lett. 92, 078101 (2004)
Kunis, S., Potts, D.: Fast spherical Fourier algorithms. J. Comput. Appl. Math. 161, 75–98 (2003)
Li, X., Lowengrub, J., Voigt, A., Rätz, A.: Solving PDEś in complex geometries: a diffuse domain approach. Commun. Math. Sci. 7, 81–107 (2009)
Li, Y., Miao, H., Ma, H., Chen, J.Z.: Defect-free states and disclinations in toroidal nematics. RSC Adv. 4, 27471–27480 (2014)
Lopez-Leon, T., Fernandez-Nieves, A., Nobili, M., Blanc, C.: Nematic-smectic transition in spherical shells. Phys. Rev. Lett. 106, 247802 (2011)
Lopez-Leon, T., Koning, V., Devaiah, K.B.S., Vitelli, V., Fernandez-Nieves, A.: Frustrated nematic order in spherical geometries. Nat. Phys. 7, 391–394 (2011)
Lowengrub, J., Rätz, A., Voigt, A.: Phase-field approximation of the dynamics of multicomponent vesicles: spinodal decomposition, coarsening, budding, and fission. Phys. Rev. E 79, 031926 (2009)
Lubensky, T.C., Prost, J.: Orientational order and vesicle shape. J. Phys. II Fr. 2, 371–382 (1992)
Macdonald, C.B., Ruuth, S.J.: Level set equations on surfaces via the closest point method. J. Sci. Comput. 35, 219–240 (2008)
Menzel, A.M., Löwen, H.: Traveling and resting crystals in active systems. Phys. Rev. Lett. 110, 055702 (2013)
Mohamed, M.S., Hirani, A.N., Samtaney, R.: Discrete exterior calculus discretization of incompressible Navier–Stokes equations over surface simplicial meshes. J. Comput. Phys. 312, 175–191 (2016)
Napoli, G., Vergori, L.: Extrinsic curvature effects on nematic shells. Phys. Rev. Lett. 108, 207803 (2012)
Napoli, G., Vergori, L.: Surface free energies for nematic shells. Phys. Rev. E 85, 061701 (2012)
Nelson, D.R.: Order, frustration, and defects in liquids and glasses. Phys. Rev. B 28, 5515–5535 (1983)
Nelson, D.R.: Towards a tetravalant chemistry of colloids. Nano Lett. 2, 1125–1129 (2002)
Nguyen, T.S., Geng, J., Selinger, R.L.B., Selinger, J.V.: Nematic order on a deformable vesicle: theory and simulation. Soft Matter 9, 8314–8326 (2013)
Nitschke, I.: Diskretes Äußeres Kalkül (DEC) auf Oberflächen ohne Rand, Diploma thesis, Technische Universiät Dresden, Dresden, Germany (2014). http://nbn-resolving.de/urn:nbn:de:bsz:14-qucosa-217800
Nitschke, I., Reuther, S., Voigt, A.: Discrete exterior calculus (DEC) for the surface Navier–Stokes equation. arXiv Preprint, arXiv:1611.04392 (2016)
Nitschke, I., Voigt, A., Wensch, J.: A finite element approach to incompressible two-phase flow on manifolds. J. Fluid Mech. 708, 418–438 (2012)
Olshanskii, M.A., Reusken, A., Xu, X.: On surface meshes induced by level set functions. Comput. Vis. Sci. 15, 53–60 (2013)
Oswald, P., Pieranski, P.: Nematic and Cholesteric Liquid Crystals: Concepts and Physical Properties Illustrated by Experiments, Liquid Crystals Book Series. CRC Press, Boca Raton (2005)
Ramaswamy, R., Jülicher, F.: Activity induced travelling waves, vortices and spatiotemporal chaos in a model actomyosin layer. Sci. Rep. 6, 20838 (2016)
Rätz, A., Röger, M.: Turing instabilities in a mathematical model for signaling networks. J. Math. Biol. 65, 1215–1244 (2012)
Rätz, A., Voigt, A.: PDE’s on surfaces—a diffuse interface approach. Commun. Math. Sci. 4, 575–590 (2006)
Rätz, A., Voigt, A.: A diffuse-interface approximation for surface diffusion including adatoms. Nonlinearity 20, 177–192 (2007)
Reuther, S., Voigt, A.: The interplay of curvature and vortices in flow on curved surfaces. Multiscale Model. Simul. 13, 632–643 (2015)
Ruuth, S.J., Merriman, B.: A simple embedding method for solving partial differential equations on surfaces. J. Comput. Phys. 227, 2118–2129 (2008)
Schaeffer, N.: Efficient spherical harmonic transforms aimed at pseudospectral numerical simulations. Geochem. Geophys. 14, 751–758 (2013)
Segatti, A., Snarski, M., Veneroni, M.: Equilibrium configurations of nematic liquid crystals on a torus. Phys. Rev. E 90, 012501 (2014)
Segatti, A., Snarski, M., Veneroni, M.: Analysis of a variational model for nematic shells. Math. Model. Methods Appl. Sci. 26, 1865–1918 (2016)
Stenger, F.: Meshconv, a mesh processing and conversion tool (2016). https://gitlab.math.tu-dresden.de/iwr/meshconv. Computer software
Stöcker, C.: Level set methods for higher order evolution laws. Ph.D. thesis, Technische Universität Dresden, Germany (2008)
Stöcker, C., Voigt, A.: Geodesic evolution laws—a level set approach. SIAM Imaging Sci. 1, 379 (2008)
Stoop, N., Lagrange, R., Terwagne, D., Reis, P.M., Dunkel, J.: Curvature-induced symmetry breaking determines elastic surface patterns. Nat. Mater. 14, 337 (2015)
Suda, R., Takami, M.: A fast spherical harmonics transform algorithm. Math. Comput. 71, 703–715 (2002)
Valette, S., Chassery, J.M., Prost, R.: Generic remeshing of 3D triangular meshes with metric-dependent discrete Voronoi diagrams. IEEE Trans. Vis. Comput. Graph. 14, 369–381 (2008)
Valette, S., Chassery, J.M., Prost, R.: ACVD, Surface Mesh Coarsinging and Resampling (2014). https://github.com/valette/ACVD. Computer software
VanderZee, E., Hirani, A.N., Guoy, D., Ramos, E.A.: Well-centered triangulation. SIAM J. Sci. Comput. 31, 4497–4523 (2010)
Vey, S., Voigt, A.: AMDiS: adaptive multidimensional simulations. Comput. Vis. Sci. 10, 57–67 (2007)
Vitelli, V., Nelson, D.R.: Nematic textures in spherical shells. Phys. Rev. E 74, 021711 (2006)
Witkowski, T., Ling, S., Praetorius, S., Voigt, A.: Software concepts and numerical algorithms for a scalable adaptive parallel finite element method. Adv. Comput. Math. 41, 1145–1177 (2015)
Acknowledgements
This work is partially supported by the German Research Foundation through Grant Vo889/18. We further acknowledge computing resources provided at JSC under Grant HR06.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Robert V. Kohn.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendices
Appendix A: Thin-Film Limit of Penalized Frank–Oseen Energy
Considering a thin shell \( \Omega _{\delta } = \mathcal {S}\times [-\delta /2,\delta /2]\) around the surface \( \mathcal {S}\) with thickness \( \delta \), the local coordinates \( \theta \) and \( \varphi \) of the surface immersion \( \mathbf {x}\) and an additional coordinate \( \xi \), which acts along the surface normal \(\varvec{\nu }\), lead to a thin shell parametrization \( \widetilde{\mathbf {x}}:U_{\delta } \rightarrow \mathbb {R}^{3} \) for the parameter domain \(U_\delta := U\times [-\delta /2,\delta /2]\), with \(\widetilde{\mathbf {x}}\) defined by
The thickness \( \delta \) is sufficiently small to guarantee the injectivity of the pushforward, see Napoli and Vergori (2012b).
For a better readability, we denote indices which mark all three components \( \{\theta ,\varphi ,\xi \} \) by capital letters. The indices for the surface components \( \{\theta ,\varphi \} \) are denoted by small letters. The metric tensor \( \widetilde{\mathbf {g}} \) of the thin shell is given by its components \( \widetilde{g}_{IJ} = \partial _{I}\widetilde{\mathbf {x}}\cdot \partial _{J}\widetilde{\mathbf {x}}\), i.e.,
The pure formal indices on \(\mathcal {O}\) extend the asymptotic polynomial behavior to tensor context and preserve summation conventions. Hence, for the Christoffel symbols \( \widetilde{\varGamma }_{I J}^{K} = \frac{1}{2}\widetilde{g}^{KL}\left( \partial _{I}\widetilde{g}_{JL} + \partial _{J}\widetilde{g}_{IL} - \partial _{L}\widetilde{g}_{IJ} \right) \), we obtain
We can approximate the square root of the determinant \( |\widetilde{\mathbf {g}}| \) on \( \mathcal {S}\) by \( \sqrt{|\widetilde{\mathbf {g}}|} = \sqrt{\widetilde{g}_{\xi \xi }|\mathbf {g}|} + \mathcal {O}(\xi )= \left( 1 + \mathcal {O}(\xi )\right) \sqrt{|\mathbf {g}|} \). Therefore, the volume element becomes
The 3-tensor, with the same qualities as the volume element, is the Levi–Civita tensor
with the common Levi–Civita symbols \( \varepsilon _{IJK}\in \{-1,0,1\} \). With the Levi–Civita tensor \( \mathbf {E} \) on the surface, defined by \( E_{ij} = \,\text {d}{\mathcal {S}}\left( \partial _{i}\mathbf {x}, \partial _{j}\mathbf {x}\right) = \sqrt{|\mathbf {g}|}\varepsilon _{ij} \), and the fact that all non-vanishing components of the Levi–Civita tensor \( \mathbf {\widetilde{E}} \) in the thin shell have exactly one \( \xi \)-index, we obtain
For a better distinction, we use a semicolon in the thin shell and a straight line on the surface to mark the components of the covariant derivative, i.e., for the vector fields \( \widetilde{\mathbf {p}}\in C^{1}\left( \Omega _{\delta }, \mathsf {T}\Omega _{\delta } \right) \) and \( \mathbf {p}\in C^{1}\left( \mathcal {S}, \mathsf {T}\mathcal {S}\right) \), we write
The contravariant derivatives are given by \( \widetilde{\text {p}}^{I;J} = \widetilde{g}^{JK}{{\widetilde{\text {p}}}^{I}}_{;K} \) and \( p^{i|j} = g^{jk}{{p}^{i}}_{|k} \). Henceforward, we assume that \( \widetilde{\mathbf {p}}\in \mathsf {T}\Omega _{\delta } \) is an extension of \( \mathbf {p}\), i.e., \( \widetilde{\mathbf {p}}\big |_{\mathcal {S}} = \mathbf {p}\in \mathsf {T}\mathcal {S}\), and \( \widetilde{\mathbf {p}} \) is parallel and length preserving in direction of \( \varvec{\nu }\), i.e., \( {{\widetilde{\text {p}}}^{I}}_{;\xi } = 0 \) as a consequence. Therefore, the Taylor approximation on the surface of the contravariant tangential components becomes
It holds \( \widetilde{\text {p}}^{\xi } = 0 \), because \( \widetilde{\text {p}}^{\xi }\big |_{\mathcal {S}} = 0 \) and \( \partial _{\xi }\widetilde{\text {p}}^{\xi } = {{\widetilde{\text {p}}}^{\xi }}_{;\xi } - \widetilde{\varGamma }_{\xi K}^{\xi }\widetilde{\text {p}}^{K} = 0 \), but nonetheless, we get non-vanishing covariant tangential derivatives
All remaining covariant derivatives can be approximated by
The divergence of a vector field is the trace of its covariant derivative reads
The covariant curl of a vector field can be obtained by a double contraction of the Levi–Civita tensor and the contravariant derivative, i.e.,
With (86), the \( \xi \)-component of the curl can be approximated by
and the covariant tangential components by
where we use, that for a every \( \mathbf {q}\in \mathsf {T}\mathcal {S}\)
is valid on \( \mathcal {S}\), see Abraham et al. (1988). The Hodge star operator is length preserving and the metric \( \mathbf {\widetilde{g}} \) induces the common norm in the thin shell; therefore, it holds
Finally, with \( \left\| \widetilde{\mathbf {p}} \right\| ^{2}_{\Omega _{\delta }} = \left\| \mathbf {p}\right\| ^{2}_{\mathcal {S}} + \mathcal {O}(\xi )\), (84), (92), (94), and (95), we can approximate the penalized Frank–Oseen energy (3) in the thin shell \( \Omega _{\delta } \) by
for \( \widetilde{\mathbf {p}}\in H^{\text {DR}}( \Omega _{\delta };\, \mathsf {T}\Omega _{\delta }) \) and \( \mathbf {p}\in H^{\text {DR}}( \mathcal {S};\, \mathsf {T}\mathcal {S}) \).
Appendix B: Integral Theorems
The exterior derivative \( \mathbf {d}\) is the \( L^{2} \)-adjoint of \( (-* \mathbf {d}*) \). This allows to obtain some frequently used integral identities for the tangential vector field \( \mathbf {p}=\varvec{\alpha }^{\sharp }:\mathcal {S}\rightarrow \mathsf {T}\mathcal {S}\) on a closed surface \( \mathcal {S}\) and also for its \( \mathbb {R}^{3} \) extension \( \widehat{\mathbf {p}}:\mathcal {S}\rightarrow \mathbb {R}^3 \), with \( \mathbf {p}= \pi _{\mathsf {T}\mathcal {S}}\widehat{\mathbf {p}}\). We get
and
Note that \( **\alpha = -\alpha \) and the inner product is invariant with respect to \( * \), \( \flat \), and \( \sharp \), applied to both arguments of the product simultaneously, see Abraham et al. (1988). Hence, we obtain for the Laplace–deRham operator
Appendix C: Convergence Study of the Laplace–deRham Approximation
To justify the approximation \(\varvec{\Delta }^{\text {dR}}\mathbf {p}\approx \widehat{\varvec{\Delta }}^{\text {dR}}\widehat{\mathbf {p}}+ {\omega _\mathrm{t}}\varvec{\nu }\left( \varvec{\nu }\cdot \widehat{\mathbf {p}}\right) \), we set up a test case consisting of a vector-valued Helmholtz equation on an ellipsoidal surface \(\mathcal {S}^{E}\) (major axis: 1.0, 0.5, and 1.5)
with given analytical solution \(\mathbf {p}_{s} = \left[ -2y, 0.5 x, 0 \right] ^\mathrm{T} \in C( \mathcal {S}^{E}, \mathsf {T}\mathcal {S}^{E})\). We solve
using sFEM on a conforming triangulation \(\mathcal {S}^{E}_h\) of \(\mathcal {S}^{E}\) with piecewise linear Lagrange elements \(\mathbb {V}_h(\mathcal {S}^{E}_h) = \{ v_h \in C^0(\mathcal {S}^{E}_h) \; : \; v_h|_T \in \mathbb {P}^1, \, \forall \, T \in \mathcal {T}\}\) as trial and test space for all components \(\hat{\text {p}}_{i}\). This leads to a sequence of linear discrete equations
To assemble and solve the resulting system, we use the FEM toolbox AMDiS (Vey and Voigt 2007; Witkowski et al. 2015).
Figure 9 shows the \(L^2\)-error \(\epsilon _{L^2}(\mathbf {p}) = \left( \int _{\mathcal {S}^{E}} \sum _{i=1} (\widehat{\mathbf {p}}_i - \text {p}_{s,i})^2 \,\text {d}{\mathcal {S}}\right) ^{1/2}\) vs \({\omega _\mathrm{t}}\) and linear convergence, which is only limited by the mesh quality.

\(L^2\)-error for \(\widehat{\varvec{\Delta }}^{\text {dR}}\) approximation (solid lines) for two well-centered triangulations of \(\mathcal {S}^{E}\) with 25k and 100k vertices. The black dashed line indicates linear rate of convergence. The dash doted line shows the result for a componentwise approximation of \(\varvec{\Delta }^{\text {dR}}\) in (100) (Color figure online)
As a complementary result and to emphasize the delicate nature of the coupling between curvature and spatial derivatives, we also show in Fig. 9 the \(L^2\)-error of a componentwise approximation of \(\varvec{\Delta }^{\text {dR}}\)
As clearly visible in Fig. 9, this approximation fails for any values of \({\omega _\mathrm{t}}\) to reproduce the \(\varvec{\Delta }^{\text {dR}}\) behavior on \(\mathcal {S}^{E}\).
Appendix D: DEC—Notations and Details
1.1 D.1: Notations
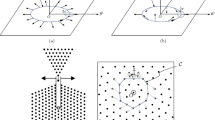
We often use the strict order relation \( \succ \) and \( \prec \) on simplices, where \( \succ \) is proverbial the “contains” relation, i.e., \( e \succ v \) means: the edge e contains the vertex v. Correspondingly is \( \prec \) the “part of” relation, i.e., \( v \prec T\) means: the vertex v is part of the face \( T\). Hence, we can use this notation also for sums, like \( \sum _{T\succ e} \), i.e., the sum over all faces \( T\) containing edge e, or \( \sum _{v\prec e} \), i.e., the sum over all vertices v being part of edge e. Sometimes we need to determine this relation for edges more precisely with respect to the orientation. Therefore, a sign function is introduced,
to describe such relations between faces and edges, or vertices and edges, respectively. Figure 10 gives a schematic picture.

Left this simple example mesh leads to \( s_{T_{1},e} = +1 \), \( s_{T_{2},e} = -1 \), \( s_{v_{1},e} = -1 \) and \( s_{v_{2},e} = +1 \). Right the vertex v (green) and its Voronoi cell \( \star v \) (semitransparent green); the edge e (blue) and its Voronoi edge \( \star e \) (blue); the face \( T\) (semitransparent red) and its Voronoi vertex (red) (Color figure online)
The property of primal mesh to be well centered ensures the existence of a Voronoi mesh (dual mesh), which is also an orientable manifold-like simplicial complex, but not well centered.
The basis of the Voronoi mesh is not simplices, but chains of them. To identify these basic chains, we apply the (geometrical) star operator \( \star \) on the primal simplices, i.e., \( \star v\) is the Voronoi cell corresponding to the vertex v and inherits its orientation from the orientation of the polytope \( \left| \mathcal {K}\right| \). \( \star v \) is, from a geometric point of view, the convex hull of circumcenters \( c(T) \) of all triangles \( T\succ v \). The Voronoi edge \( \star e \) of an edge e is a connection of the right face \( T_{2}\succ e \) with the left face \( T_{1}\succ e \) over the midpoint c(e) . The Voronoi vertex \( \star T\) of a face \( T\) is simply its circumcenter \( c(T) \) (see Fig. 10). For greater details and a more mathematical discussion, see, e.g., Hirani (2003), VanderZee et al. (2010).
The boundary operator \( \partial \) maps simplices (or chains of them) to the chain of simplices that describes its boundary, with respect to its orientation (see Hirani 2003), e.g., \( \partial (\star v)=-\sum _{e\succ v} s_{v,e}(\star e)\) (formal sum for chains) and \( \partial e = \sum _{v\prec e} s_{v,e} v \).
The expression \( \left| \cdot \right| \) measures the volume of a simplex, i.e., \( \left| T\right| \) the area of the face \( T\), \( \left| e \right| \) the length of the edge e, and the zero-dimensional volume \( \left| v \right| \) are set to be 1. Therefore, the volume is also defined for chains and the dual mesh, since the integral is a linear functional.
1.2 D.2: Laplace Operators
With the Stokes theorem and the discrete Hodge operator defined in Hirani (2003), we can develop a DEC discretized Rot-Rot-Laplace for a discrete 1-form \( \alpha \in \varLambda _{h}^{1}(\mathcal {K}) \) by
and a DEC discretized Grad-Div-Laplace by
Hence, we obtain the DEC discretized Laplace–deRham operator by
1.3 D.3: Conflate Linear Operators and Its Hodge Dual to a PD-(1, 1)-Tensor
For a linear operator \(\mathbf {M}:\mathsf {T}^{*}\mathcal {S}\rightarrow \mathsf {T}^{*}\mathcal {S}\) pointwise defined as a mixed co- and contravariant (1,1)-tensor with components \( {{M}_{i}}^{j} \), we discretize the 1-form \( \mathbf {M}\varvec{\alpha }\) on an edge \( e\in \mathcal {E}\) by definition (27) and approximate the operator on the projected midpoint of the edge, i.e.,
with \( \mathbf {M}(e) := \mathbf {M}|_{\pi (c(e))} \). With respect to an orthogonal basis \( \{\partial _{i}\mathbf {x},\partial _{j}\mathbf {x}\} \) with metric tensor \( \mathbf {g}=g_{i}(dx^{i})^{2} \), we obtain for the 1-form \( \varvec{\alpha }=\alpha _{i}dx^{i} \) the Hodge dual
Hence, we can replace the 1-forms beneath the integrals by
Now, we use the basis \( \{\mathbf {e},\mathbf {e}_{\star }\} \) defined in Sect. 4.2 on the polytope \( |\mathcal {K}| \) and the resulting metric (34), i.e., \( g_{1}=|e|^{2} \) and \( g_{2} = |\star e|^{2} \). This leads to an approximation of \( \left( \mathbf {M}\varvec{\alpha }\right) _{h} \in \varLambda ^{1}_{h}(\mathcal {K}) \) as a linear combination of \( \alpha _{h}, (*\alpha )_{h} \in \varLambda ^{1}_{h}(\mathcal {K})\), or rather, evaluated on an edge \( e\in \mathcal {E}\)
and, in general, for \( \mathbf {v},\mathbf {w}\in \mathrm{Span}\,\left\{ \mathbf {e},\mathbf {e}_{\star } \right\} \) is \( M_{\mathbf {v},\mathbf {w}}(e) = \mathbf {v}\cdot \mathbf {M}(e)\cdot \mathbf {w} = v^{i}\left[ \mathbf {M}(e)\right] _{ij}w^{j}\) the evaluation of the complete covariant tensor \( \mathbf {M}(e) \) in direction \( \mathbf {v} \) and \( \mathbf {w} \). Note, if \( \mathbf {M}\in \mathsf {T}\mathcal {S}\times \mathsf {T}\mathcal {S}\) is formulated in Euclidean \( \mathbb {R}^{3} \) coordinates, so that \( \mathbf {M}(e)\in \mathbb {R}^{3 \times 3} \), there is no distinction between co- and contravariant components of \( \mathbf {M}(e) \). Furthermore, if we use the approximation \( \left( *\mathbf {M}\varvec{\alpha }\right) _{h}(e) \approx -\frac{|e|}{|\star e|}\left( \mathbf {M}\varvec{\alpha }\right) _{h}(\star e)\), we get with respect to (105) and (107)
Finally, we can summarize (108) and (109) with the PD-1-form \( \underline{\varvec{\alpha }}\in \varLambda ^{1}_{h}(\mathcal {K};\mathfrak {T}^{*}\mathcal {E}) \) on every edge \( e\in \mathcal {E}\) to
where the evaluation argument e is omitted for a better readability.
Rights and permissions
About this article

Cite this article
Nestler, M., Nitschke, I., Praetorius, S. et al. Orientational Order on Surfaces: The Coupling of Topology, Geometry, and Dynamics. J Nonlinear Sci 28, 147–191 (2018). https://doi.org/10.1007/s00332-017-9405-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00332-017-9405-2