
Abstract
We present the mathematical framework of an athlete modelled as a system of coupled rigid bodies to simulate platform and springboard diving. Euler’s equations of motion are generalised to non-rigid bodies and are then used to innovate a new dive sequence that in principle can be performed by real-world athletes. We begin by assuming that shape changes are instantaneous so that the equations of motion simplify enough to be solved analytically, and then use this insight to present a new dive (513XD) consisting of 1.5 somersaults and five twists using realistic shape changes. Finally, we demonstrate the phenomenon of converting pure somersaulting motion into pure twisting motion by using a sequence of impulsive shape changes, which may have applications in other fields such as space aeronautics.

















Similar content being viewed by others


Notes
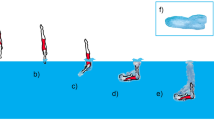
The FINA diving code 513XD has the following interpretation: the initial 51 stands for “twisting forward”, the following digits are the number of half-somersaults (3) and the number of half-twists (10=X), and the final letter D stands for “free” position.
References
Ashbaugh, M.S., Chicone, C.C., Cushman, R.H.: The twisting tennis racket. J. Dyn. Differ. Equ. 3, 67–85 (1991)
Bates, L., Cushman, R., Savev, E.: The rotation number and the herpolhode angle in Euler’s top. Zeitschrift füur Angewandte Mathematik und Physik (ZAMP) 56(2), 183–191 (2005)
Batterman, C.: The Techniques of Springboard Diving. MIT Press, Cambridge (2003)
Bharadwaj, S., Duignan, N., Dullin, H.R., Leung, K., Tong, W.: The diver with a rotor. Indag. Math. (2016). doi:10.1016/j.indag.2016.04.003
Cabrera, A.: A generalized montgomery phase formula for rotating self-deforming bodies. J. Geom. Phys. 57, 1405–1420 (2007)
Dullin, H.R., Tong, W.: Twisting somersault. SIAM J. Appl. Dyn. Syst. 15(4), 1806–1822 (2016)
Fairbanks, A.R.: Teaching Springboard Diving. Prentice-Hall Inc., Englewood Cliffs (1963)
Frohlich, C.: Do springboard divers violate angular momentum? Am. J. Phys. 47, 583–592 (1979)
Hanavan, E.P.: A Mathematical Model of the Human Body. USA Defense Technical Information Center, Accession Number AD0608463 (1964). http://www.dtic.mil/get-tr-doc/pdf?AD=AD0608463
Huber, J.: Springboard and Platform Diving. Human Kinetics (2015). www.humankinetics.com
Jensen, R.K.: Model for body segment parameters. In: Komi, P.V. (ed.) Biomechanics V-B, pp. 380–386. University Park Press, Baltimore (1976)
Landau, L.D., Lifshitz, E.M.: Mechanics, 3rd edn, vol. 1. Butterworth-Heinemann, London (1976)
Montgomery, R.: How much does the rigid body rotate? A berry phase from the 18th century. Am. J. Phys. 59, 394–398 (1991)
Moriarty, P.: Springboard Diving. Ronald Press Company, NY (1959)
O’Brien, R.: Springboard and Platform Diving, 2nd edn. Human Kinetics (2002)
Still, S., Carter, C.A.: Springboard and Highboard Diving: Training, Techniques and Competition, Pelham pictorial sports instruction series, Pelham Books, London, illustrated ed. (1979)
Tong, W.: Coupled Rigid Body Dynamics with Application to Diving, Ph.D. thesis, University of Sydney (2016)
Yeadon, M.R.: The Mechanics of Twisting Somersault. PhD thesis, Loughborough University (1984)
Yeadon, M.R.: The simulation of aerial movement—I: the determination of orientation angles from film data. J. Biomech. 23, 59–66 (1990)
Yeadon, M.R.: The simulation of aerial movement—II: a mathematical inertia model of the human body. J. Biomech. 23, 67–74 (1990)
Yeadon, M.R.: The simulation of aerial movement—III: the determination of the angular momentum of the human body. J. Biomech. 23, 75–83 (1990)
Yeadon, M.R.: The simulation of aerial movement—IV: a computer simulation model. J. Biomech. 23, 85–89 (1990)
Yeadon, M.R.: The biomechanics of twisting somersaults:Part I: rigid body motions. J. Sports Sci. 11, 187–198 (1993)
Yeadon, M.R.: The biomechanics of twisting somersaults Part II: contact twist. J. Sports Sci. 11, 199–208 (1993)
Yeadon, M.R.: The biomechanics of twisting somersaults Part III: aerial twist. J. Sports Sci. 11, 209–218 (1993)
Yeadon, M.R.: The biomechanics of twisting somersaults Part IV: partitioning performances using the tilt angle. J. Sports Sci. 11, 219–225 (1993)
Acknowledgements
This research was supported in part by the Australian Research Council through the Linkage Grant LP100200245 “Bodies in Space” in collaboration with the New South Wales Institute of Sports.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Anthony Bloch.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendices
Appendix A: Model Parameters
We combine multiple body parts of Table 5 to produce the three segments denoted by \(B_i\) for \(i\in \{b,l,r\}\), which represent the body, left arm, and right arm, respectively. The numerical values of the mass and tensor of inertia of segments in our model are
The collection of \(\{\varvec{\tilde{J}}_i^j\}\) that specify the geometry of our model is
In the layout position, the athlete has shape \((\alpha _l,\alpha _r)=(\pi ,\pi )\) and the tensor of inertia is
In the twist position, the shape is either \((\alpha _l,\alpha _r)=(0,\pi )\) or \((\alpha _l,\alpha _r)=(\pi ,0)\), which produces the same diagonalised tensor of inertia
Appendix B: Components of I and \(\varvec{A}\)
Evaluating (4) with the abduction–adduction plane of motion restriction simplifies the tensor of inertia I to the form \(I = \displaystyle \left( \begin{array}{ccc} I_{xx} &{} 0 &{} 0\\ 0 &{} I_{yy} &{} I_{yz}\\ 0 &{} I_{yz} &{} I_{zz} \end{array}\right) \). Explicitly, the components are
where
Similarly, (5) simplifies to \(\varvec{A}=\big (A_l \dot{\alpha }_l+A_r \dot{\alpha }_r,0,0\big )^t\) where
The constants \(a_0, a_1,\dots ,a_7\) are determined by the collection of \(\left\{ m_i, \tilde{I}_i,\varvec{\tilde{J}}_i^j\right\} \) and are
Appendix C: Equations of Orientation
The orientation can be tracked from the solution of the equations of motion (11). We will represent the orientation with unit quaternions as they provide an elegant form of encoding the angle vector information. Consider a clockwise rotation of \(\theta \) about the unit vector \(\varvec{u}\), which can be presented with the unit quaternion \(q=q_0+\varvec{q}=\cos (\theta /2)+\varvec{u}\sin {\theta /2}\), where the vector \(\varvec{q}=q_1\varvec{i}+q_2\varvec{j}+q_3\varvec{k}\) specifies the imaginary parts. To rotate an arbitrary vector \(\varvec{v}\) by the quaternion q, we first treat the vector as a pure quaternion expressed as \(v=0+\varvec{v}\) and then apply the transformation \(p=qv\bar{q}\), where \(\bar{q}=q_0-\varvec{q}\) is the quaternion conjugate. The result is a pure quaternion \(p=0+2(\varvec{v}\cdot \varvec{q})\varvec{q}+(q_0^2-\varvec{q}\cdot \varvec{q})\varvec{v}-2q_0\varvec{v}\times \varvec{q}\), which is linear in \(\varvec{v}\) and can therefore be rearranged to obtain the vector
Now the coefficient of \(\varvec{v}\) is precisely the rotation matrix R, so substituting it in \(\hat{\varvec{\Omega }}=R^t\dot{R}\) and removing the hat operator gives
where \(\varvec{\Omega }\) is a known vector obtained from solving the equations of motion (11). As q is a unit quaternion, we can incorporate the constraint \(q_0\dot{q}_0+q_1\dot{q}_1+q_2\dot{q}_2+q_3\dot{q}_3=0\) with (36) to derive the equations of orientation
Together with (11) and (37), a complete description of the dynamics for a system of coupled rigid bodies can be given.
Rights and permissions
About this article

Cite this article
Tong, W., Dullin, H.R. A New Twisting Somersault: 513XD. J Nonlinear Sci 27, 2037–2061 (2017). https://doi.org/10.1007/s00332-017-9403-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00332-017-9403-4