
Abstract
We use the method of \(\Gamma \)-convergence to study the behavior of the Landau-de Gennes model for a nematic liquid crystalline film attached to a general fixed surface in the limit of vanishing thickness. This paper generalizes the approach in Golovaty et al. (J Nonlinear Sci 25(6):1431–1451, 2015) where we considered a similar problem for a planar surface. Since the anchoring energy dominates when the thickness of the film is small, it is essential to understand its influence on the structure of the minimizers of the limiting energy. In particular, the anchoring energy dictates the class of admissible competitors and the structure of the limiting problem. We assume general weak anchoring conditions on the top and the bottom surfaces of the film and strong Dirichlet boundary conditions on the lateral boundary of the film when the surface is not closed. We establish a general convergence result to an energy defined on the surface that involves a somewhat surprising remnant of the normal component of the tensor gradient. Then we exhibit one effect of curvature through an analysis of the behavior of minimizers to the limiting problem when the substrate is a frustum.



Similar content being viewed by others

References
Alama S., Bronsard L., Lamy X.: Minimizers of the Landau-de Gennes energy around a spherical colloid particle. Arch. Ration. Mech. Anal. pp. 1–24 (2016)
Anzellotti, G., Baldo, S., Percivale, D.: Dimension reduction in variational problems, asymptotic development in \(\Gamma \)-convergence and thin structures in elasticity. Asymptot. Anal. 9(1), 61–100 (1994)
Ball, J.M., Majumdar, A.: Nematic liquid crystals: from Maier–Saupe to a continuum theory. Mol. Cryst. Liq. Cryst. 525(1), 1–11 (2010)
Bauman, P., Park, J., Phillips, D.: Analysis of nematic liquid crystals with disclination lines. Arch. Ration. Mech. Anal. 205(3), 795–826 (2012)
Canevari, G.: Biaxiality in the asymptotic analysis of a 2D Landau-de Gennes model for liquid crystals. ESAIM Control Optim. Calc. Var. 21(1), 101–137 (2015)
Contreras, A., Sternberg, P.: \(\Gamma \)-convergence and the emergence of vortices for Ginzburg–Landau on thin shells and manifolds. Calc. Var. Partial Differ. Equ. 38(1–2), 243–274 (2010)
Dal Maso, G.: An introduction to \(\Gamma \)-convergence. In: Progress in Nonlinear Differential Equations and their Applications, vol. 8. Birkhäuser Boston Inc., Boston, MA (1993)
Davis, T.A., Gartland Jr., E.C.: Finite element analysis of the Landau-de Gennes minimization problem for liquid crystals. SIAM J. Numer. Anal. 35(1), 336–362 (1998)
Fournier, J.-B., Galatola, P.: Modeling planar degenerate wetting and anchoring in nematic liquid crystals. EPL (Europhys. Lett.) 72(3), 403 (2005)
Golovaty, D., Montero, J.A.: On minimizers of a Landau-de Gennes energy functional on planar domains. Arch. Ration. Mech. Anal. pp. 1–44 (2013)
Golovaty, D., Montero, J.A., Sternberg, P.: Dimension reduction for the Landau-de Gennes model in planar nematic thin films. J. Nonlinear Sci. 25(6), 1431–1451 (2015)
Longa, L., Monselesan, D., Trebin, H.-R.: An extension of the Landau-Ginzburg-de Gennes theory for liquid crystals. Liq. Cryst. 2(6), 769–796 (1987)
Majumdar, A., Zarnescu, A.: Landau-de Gennes theory of nematic liquid crystals: the Oseen–Frank limit and beyond. Arch. Ration. Mech. Anal. 196(1), 227–280 (2010)
Mottram, N.J., Newton, C.: Introduction to \(Q\)-Tensor Theory. Technical Report 10, Department of Mathematics, University of Strathclyde (2004)
Napoli, G., Vergori, L.: Surface free energies for nematic shells. Phys. Rev. E 85, 061701 (2012)
Schopohl, N., Sluckin, T.: Defect core structure in nematic liquid crystals. Phys. Rev. Lett. 59, 2582–2584 (1987)
Segatti, A., Snarski, M., Marco, V.: Analysis of a variational model for nematic shells. arXiv:1408.2795 [math-ph] (2014)
Simon, L.: Lectures on Geometric Measure Theory, vol. 3 of Proceedings of the Centre for Mathematical Analysis, Australian National University. Australian National University, Centre for Mathematical Analysis, Canberra (1983)
Sonnet, A., Virga, E.: Dissipative Ordered Fluids: Theories for Liquid Crystals. Springer, New York (2013)
Virga, E.G.: Curvature potentials for defects on nematic shells. In: Lecture Notes, Isaac Newton Institute for Mathematical Sciences. Cambridge (June 2013)
Walker, S.W.: The Shapes of Things: A Practical Guide to Differential Geometry and the Shape Derivative, vol. 28. SIAM, Philadelphia (2015)
Acknowledgements
D.G. acknowledges support from NSF DMS-1434969. P.S. acknowledges support from NSF DMS-1101290 and NSF DMS-1362879.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Robert V. Kohn.
Appendices
Appendix 1: Dimension Reduction for Parametric Surfaces
As an alternative to the approach to the dimension reduction carried out in the Section 3 here we formally outline a different argument leading to the same conclusion but using a parametric representation of the manifold \(\mathcal M\). In addition to giving a different take on the limiting procedure, the parametric formulation was utilized in Sects. 5 and 6.
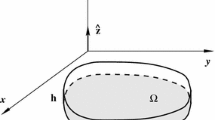
Suppose that the geometry of the problem is as shown in Fig. 1. We work in non-dimensional coordinates as specified in Sect. 2.4. The smoothness of \(\mathcal {M}\) ensures that, for a given \(x_0\in \mathcal {M}\), there is an open set \(U\subset \mathbb R^2\) and a smooth function \(\phi :U\rightarrow \mathcal {M}\) that (a) maps U homeomorphically onto an open neighborhood \(V\subset \mathcal {M}\) of \(x_0\) and (b) has a Jacobian matrix of rank 2 on U. Since the map \(\phi ^{-1}:V\rightarrow U\) defines a local coordinate system on V, we can use the non-dimensional analog of (4) to introduce the coordinate system on \(V\times \left[ -\varepsilon ,\varepsilon \right] \) via the smooth invertible map
from \(U\times [-1,1]\) to \(\mathbb R^3\). Note that at a given point \(x(u)\in \mathcal {M}\), we have
and
where
is the matrix of the shape operator and \(\mathbb {I}\) and \(\mathbb {II}\) are the first and second fundamental forms for \(\mathcal {M}\). The shape operator \(\nabla _{\mathcal {M}}\nu \) is a symmetric operator acting on the tangent space of \(\mathcal {M}\) that satisfies
with \(\kappa _i\) and \(\mathbf{d}_i,\ i=1,2\) being the principal curvatures and directions at x(u), respectively Walker (2015).
Given \(X\in \Omega _\varepsilon \), let x be the closest point of \(\mathcal {M}\) to X. The gradient of a smooth vector field \(\mathbf{a}:V\times \left[ -\varepsilon ,\varepsilon \right] \rightarrow \mathbb R^3\) can be decomposed into orthogonal components along and perpendicular to \(\nu (x)\) by writing
Indeed,
so that
The change of variables (74) then transforms the components of the gradient of \(\mathbf{a}\) as follows
where \(J=\frac{\partial (X_1,X_2,X_3)}{\partial (u_1,u_2,t)}\) and \(D{\mathbf a}\) is the gradient of \({\mathbf a}\) with respect to \((u_1,u_2,t)\). Introducing the projection matrix
we conclude that
where \({\left( D_ux\right) }^{-1}\) is a left inverse of \(D_ux\) and
Note that the matrix \({I}+\varepsilon tA\) is invertible when \(\varepsilon \) is sufficiently small and setting \(\varepsilon =0\) reduces the right hand side of (86) to
where \(\nabla _{\mathcal M}{\mathbf a}\) is the surface gradient of \({\mathbf a}\) defined earlier in (20).
In non-dimensional coordinates, we can rewrite the expression for the elastic energy (12) as follows
when \(\varepsilon \) is small. The same arguments that led to the proof of Threorem 3.1 demonstrate that the limiting elastic energy density is given by (34), that is
where \(\nabla _{\mathcal M}Q_i=D_u{Q_i}\,{\left( D_ux\right) }^{-1}\) and \(\mathrm {div}_{\mathcal M}Q_i=\mathrm {tr}\,\nabla _{\mathcal M}Q_i=D_u{Q_i}\cdot {\left( D_ux\right) }^{-T}\), respectively, for \(i=1,\ldots ,3\).
Appendix 2: Outline of the Proof of Lemma 4.2
In order find the expression for \(f_{e}^0\left( \nabla _{\mathcal M}Q,\nu \right) \) recall that in (34) we need to minimize
among all \(G\in \mathcal A\). To this end, set \(\zeta =M_2+M_3\) and let the columns of the matrix \(U\in M^{3\times 3}\) be given by
where \(i=1,\ldots ,3\). The Eq. (91) can now be written as
Using the same procedure as in Lemma 4.1, we obtain that
minimizes (92), where
Next, substituting \(\bar{G}\) into (93) and following a lengthy sequence of trivial calculations, the minimum value of \(\phi \) is given by
The conclusion of Lemma 4.2 then follows from (94) with the help of the identities
Rights and permissions
About this article

Cite this article
Golovaty, D., Montero, J.A. & Sternberg, P. Dimension Reduction for the Landau-de Gennes Model on Curved Nematic Thin Films. J Nonlinear Sci 27, 1905–1932 (2017). https://doi.org/10.1007/s00332-017-9390-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00332-017-9390-5