
Abstract
To understand the effects that the climate change has on the evolution of species as well as the genetic consequences, we analyze an integrodifference equation (IDE) models for a reproducing and dispersing population in a spatio-temporal heterogeneous environment described by a shifting climate envelope. Our analysis on the IDE focuses on the persistence criterion, travelling wave solutions, and the inside dynamics. First, the persistence criterion, characterizing the global dynamics of the IDE, is established in terms of the basic reproduction number. In the case of persistence, a unique travelling wave is found to govern the global dynamics. The effects of the size and the shifting speed of the climate envelope on the basic reproduction number, and hence, on the persistence criterion, are also investigated. In particular, the critical domain size and the critical shifting speed are found in certain cases. Numerical simulations are performed to complement the theoretical results. In the case of persistence, we separate the travelling wave and general solutions into spatially distinct neutral fractions to study the inside dynamics. It is shown that each neutral genetic fraction rearranges itself spatially so as to asymptotically achieve the profile of the travelling wave. To measure the genetic diversity of the population density we calculate the Shannon diversity index and related indices, and use these to illustrate how diversity changes with underlying parameters.






Similar content being viewed by others
References
Bonnefon O, Coville J, Garnier J, Roques L (2014) Inside dynamics of solutions of integro-differential equations. Discrete Contin Dyn Syst Ser B 19(10):3057–3085
Bálint M, Domisch S, Engelhardt CHM, Haase P, Lehrian S, Sauer J, Theissinger K, Pauls SU, Nowak C (2011) Cryptic biodiversity loss linked to global climate change. Nat Clim Change 1(6):313–318
Berestycki H, Diekmann O, Nagelkerke CJ, Zegeling PA (2009) Can a species keep pace with a shifting climate? Bull Math Biol 71(2):399–429
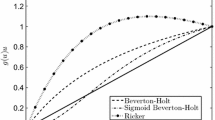
Beverton RJH, Holt SJ (1957) On the dynamics of exploited fish populations. Her Majesty’s Stationery Office, London
Bouhours J, Lewis MA (2016) Climate change and integrodifference equations in a stochastic environment. Bull Math Biol 78(9):1866–1903
Donsker MD, Varadhan SRS (1975) On a variational formula for the principal eigenvalue for operators with maximum principle. Proc Natl Acad Sci USA 72:780–783
Garnier J, Giletti T, Hamel F, Roques L (2012) Inside dynamics of pulled and pushed fronts. J Math Pures Appl (9) 98(4):428–449
Garnier J, Lewis MA (2016) Expansion under climate change: the genetic consequences. Bull Math Biol 78(11):2165–2185
Hsu S-B, Zhao X-Q (2008) Spreading speeds and traveling waves for nonmonotone integrodifference equations. SIAM J Math Anal 40(2):776–789
Inaba H (2006) Mathematical analysis of an age-structured SIR epidemic model with vertical transmission. Discrete Contin Dyn Syst Ser B 6:69–96
Kot M, Lewis MA, van den Driessche P (1996) Dispersal data and the spread of invading organisms. Ecology 77(7):2027–2042
Kreǐn MG, Rutman MA (1948) Linear operators leaving invariant a cone in a Banach space. Uspehi Matem Nauk (NS) 3(1(23)):3–95
Lewis MA (1997) Variability, patchiness, and jump dispersal in the spread of an invading population. In: Tilman D, Kareiva P (eds) Spatial ecology: the role of space in population dynamics and interspecific interactions. Princeton University Press, Princeton, pp 46–69
Leinster T, Cobbold CA (2012) Measuring diversity: the importance of species similarity. Ecology 93(3):4770489
Lui R (1982a) A nonlinear integral operator arising from a model in population genetics. I. Monotone initial data. SIAM J Math Anal 13(6):913–937
Lui R (1982b) A nonlinear integral operator arising from a model in population genetics. II. Initial data with compact support. SIAM J Math Anal 13(6):938–953
Lui R (1982/83) Existence and stability of travelling wave solutions of a nonlinear integral operator. J Math Biol 16(3):199–220
Lui R (1985) A nonlinear integral operator arising from a model in population genetics. III. Heterozygote inferior case. SIAM J Math Anal 16(6):1180–1206
Li B, Lewis MA, Weinberger HF (2009) Existence of traveling waves for integral recursions with nonmonotone growth functions. J Math Biol 58(3):323–338
Marculis NG, Lui R, Lewis MA (2017) Neutral genetic patterns for expanding populations with nonoverlapping generations. Bull Math Biol 79(4):828–852
Marek I (1970) Frobenius theory of positive operators: comparison theorems and applications. SIAM J Appl Math 19:607–628
Roques L, Garnier J, Hamel F, Klein EK (2012) Allee effect promotes diversity in traveling waves of colonization. Proc Natl Acad Sci USA 109(23):8828–8833
Parmesan C (1996) Climate and species’ range. Nature 382(6594):765
Pauls SU, Nowak C, Bálint M, Pfenninger M (2013) The impact of global climate change on genetic diversity within populations and species. Mol Ecol 22(4):925–946
Potapov AB, Lewis MA (2004) Climate and competition: the effect of moving range boundaries on habitat invasibility. Bull Math Biol 66(5):975–1008
Powell J (2001) Spatio-temporal models in ecology; an introduction to integrodifference equations. http://www.math.usu.edu/powell/wauclass/labs.pdf
Sawashima I (1964) On spectral properties of some positive operators. Nat Sci Rep Ochanomizu Univ 15:53–64
Simpson EH (1949) Measurement of diversiy. Nature 163:688
Shannon CE (1948) A mathematical theory of communication. Bell Syst Tech J 27:379–423
Takáč P (1994) A short elementary proof of the Kreǐn–Rutman theorem. Houston J Math 20(1):93–98
Weinberger HF (1982) Long-time behavior of a class of biological models. SIAM J Math Anal 13(3):353–396
Zhao X-Q (1996) Global attractivity and stability in some monotone discrete dynamical systems. Bull Austral Math Soc 53(2):305–324
Zhou Y, Kot M (2011) Discrete-time growth-dispersal models with shifting species ranges. Theor Ecol 4(1):13–25
Author information
Authors and Affiliations
Corresponding author
Additional information
Dedicated to the memory of Professor Karl Peter Hadeler.
This research was supported by a grant to MAL from the Natural Science and Engineering Research Council of Canada (Grant No. NET GP 434810-12) to the TRIA Network, with contributions from Alberta Agriculture and Forestry, Foothills Research Institute, Manitoba Conservation and Water Stewardship, Natural Resources Canada-Canadian Forest Service, Northwest Territories Environment and Natural Resources, Ontario Ministry of Natural Resources and Forestry, Saskatchewan Ministry of Environment, West Fraser and Weyerhaeuser. M.A.L. is also grateful for support through NSERC Discovery and the Canada Research Chair Program. N.G.M. acknowledges support from NSERC TRIA Network Collaborative Research Grant. Z.S. is supported by a start-up grant from the University of Alberta.
Appendices
Appendix A: Proof of Theorem 2.3
This section is devoted to the Proof of Theorem 2.3. We first present some preparatory results.
The following lemma is an immediate consequence of the stationary solution equation.
Lemma A.1
Let w be a stationary solution of (2.2). Then \(w\in C_{+}(I)\). If, in addition, \(w\not \equiv 0\), then \(w\in C_{++}(I)\).
The next result gives the nonlinear comparison principle.
Lemma A.2
Let \(\overline{w},\underline{w}\in C_{+}(I)\) satisfy \(\overline{w}\ge \mathcal {F}[\overline{w}]\) and \(\underline{w}\le \mathcal {F}[\underline{w}]\), respectively. If \(\overline{w}\not \equiv 0\), then \(\overline{w}\ge \underline{w}\).
Proof
Clearly, the conditions on \(\overline{w}\) imply that \(\overline{w}\in C_{++}(I)\). We assume that \(\underline{w}\not \equiv 0\), otherwise there is nothing to prove. Define
By the continuity of \(\overline{w}\) and \(\underline{w}\), \(\alpha _{*}\overline{w}\ge \underline{w}\). Moreover, there exists \(x_{0}\in I\) such that \(\alpha _{*}\overline{w}(x_{0})=\underline{w}(x_{0})\).
We show \(\alpha _{*}\le 1\) which leads to the result of the lemma. Suppose \(\alpha _{*}>1\) for contradiction. Clearly,
As there holds
where we used (H)-(2), we find
which leads to a contradiction.\(\square \)
The above lemma leads immediately to the uniqueness of non-zero stationary solution of (2.2).
Corollary A.3
There exists at most one non-zero stationary solution of (2.2).
The following comparison principle for sub- and super-solutions of (2.2) is trivial.
Lemma A.4
Let \(\{\overline{w}_{n}\}_{n}\subset C_{+}(I)\) and \(\{\underline{w}_{n}\}_{n}\subset C_{+}(I)\) satisfy \(\overline{w}_{n+1}\ge \mathcal {F}[\overline{w}_{n}]\) and \(\underline{w}_{n+1}\le \mathcal {F}[\underline{w}_{n}]\), respectively. If \(\overline{w}_{0}\ge \underline{w}_{0}\), then \(\overline{w}_{n}\ge \underline{w}_{n}\) for all n.
Now, we are ready to prove Theorem 2.3. We first prove Theorem 2.3(1).
Proof (Proof of Theorem 2.3(1))
Suppose \(R_{0}\le 1\) first. Clearly, 0 is a stationary solution of (2.2). It remains to show that positive stationary solutions do not exist in this case. For contradiction, let us suppose the existence of a positive stationary solution w of (2.2). By Lemma A.1, \(\min _{I}w>0\). By (H)-(2),
which implies that \(w(x)<\mathcal {F}_{0}[w](x)\) for all \(x\in I\). Therefore, we can find some \(\delta \in (0,1)\) such that \(w\le (1-\delta )\mathcal {F}_{0}[w]\). We then iterate to obtain
Recall that \(\phi _{0}\in C_{++}(I)\) is the eigenfunction associated to \(R_{0}\). We may assume, without loss of generality, that \(w\le \phi _{0}\). It then follows that \(\mathcal {F}_{0}^{n}[w]\le \mathcal {F}_{0}^{n}[\phi _{0}]=R_{0}^{n}\phi _{0}\le \phi _{0}\), which leads to
This yields \(w\equiv 0\). It is a contradiction.
Now, suppose \(R_{0}>1\). By Lemma A.1 and Corollary A.3, it suffices to find one positive stationary solution of (2.2). To do so, let us consider for \(\epsilon >0\) the sequence \(\{w_{n}^{\epsilon }\}_{n}\) defined by
Let \(\delta _{0}>0\) be such that \(\frac{R_{0}}{1+\delta _{0}}>1\). It is clear that \(R_{0}=r(\mathcal {F}_{0})\le \Vert \mathcal {F}_{0}\Vert \le r_{0}=f'(0)\). Since the limit \(\lim _{\epsilon \rightarrow 0^{+}}\frac{f(\epsilon \phi _{0}(x))}{\epsilon \phi _{0}(x)}=f'(0)\) is uniform in \(x\in I\), we can find some \(\epsilon _{0}>0\) such that \(\frac{f(\epsilon _{0}\phi _{0})}{\epsilon _{0}\phi _{0}}\ge \frac{R_{0}}{1+\delta _{0}}\). It then follows the assumption on f that \(\frac{f(\epsilon \phi _{0})}{\epsilon \phi _{0}}\ge \frac{R_{0}}{1+\delta _{0}}\) for all \(\epsilon \in (0,\epsilon _{0}]\). We see that
for all \(\epsilon \in (0,\epsilon _{0}]\). It then follows from Lemma A.4 that \(w_{n+1}^{\epsilon }\ge w_{n}^{\epsilon }\) for all \(\epsilon \in (0,\epsilon _{0}]\).
Let us fix any \(\epsilon \in (0,\epsilon _{0}]\). By the boundedness of f, it is clear that \(\{w_{n}^{\epsilon }\}\) is uniformly bounded, and hence, the limit function \(w_{*}:=\lim _{n\rightarrow \infty }w_{n}^{\epsilon }\) is well-defined. It is easy to see that \(w_{*}\) is a positive stationary solution of (2.2). The upper bound on \(w_{*}\) as in the statement is trivial. This completes the proof.\(\square \)
We denote by \(w_{*}\) the unique positive stationary solution of (2.2) when \(R_{0}>1\). In the Proof of Theorem 2.3(1), we have proven the following result.
Corollary A.5
There exists \(\epsilon _{0}>0\) such that for any \(\epsilon \in (0,\epsilon _{0}]\), the sequence \(\{\mathcal {F}^{n}[\epsilon \phi _{0}]\}_{n}\) is increasing and converges in C(I) to \(w_{*}\) as \(n\rightarrow \infty \).
Proof
We only need to point out that the convergence in C(I) comes from Dini’s theorem.\(\square \)
Finally, we prove Theorem 2.3(2).
Proof (Proof of Theorem 2.3(2))
For \(M\ge \sup _{u\in [0,\infty )}f(u)\), we have \(\mathcal {F}[M]<M\). It follows that \(\{\mathcal {F}^{n}[M]\}_{n}\) is a decreasing sequence. By Theorem 2.3 and Dini’s theorem,
This together with Lemma A.4 yield the result in the case \(R_{0}\le 1\). In the case of \(R_{0}>1\), we can find some \(\epsilon _{0}>0\) and \(M_{0}>0\) such that \(\epsilon _{0}\phi _{0}\le w_{1}\le M_{0}\). We then conclude the result from Lemma A.4 and Corollary A.5.\(\square \)

A heat map for the \(\text {Div}^q\) diversity index of (3.12) where a \(q=0.2\), b \(q=1\), c \(q=2\), and d \(q=\infty \). In these simulations we use the following parameter values, \(R=1.5\), \(K_{*}=1\), \(\sigma ^2 = 0.02\) and \(\mu =0\)

A heat map for the \(\text {Div}^q\) diversity index of (3.12) where a \(q=0.2\), b \(q=1\), c \(q=2\), and d \(q=\infty \). In these simulations we use the following parameter values, \(R=1.5\), \(K_{*}=1\), \(\sigma ^2 = 0.02\) and \(\mu =0.2\)
Appendix B: Comparison of Fig. 5 with other diversity indices
To make a complete analysis of the patterns seen in Fig. 5 we provide similar plots for different diversity measures. We consider the diversity index
for \(0< q <1\) and \(1<q < \infty \). In the limit as \(q \rightarrow 1\), it can be shown that
yielding that \(\text {Div}^1\) is the exponential of the Shannon diversity index. When \(q=0\) the diversity index becomes the species richness and when \(q=\infty \) the diversity index becomes a measure of species evenness, given by the maximum \(p^i\) value. In Figs. 7 and 8 we provide plots constructed in the same manner as Fig. 5.
Rights and permissions
About this article

Cite this article
Lewis, M.A., Marculis, N.G. & Shen, Z. Integrodifference equations in the presence of climate change: persistence criterion, travelling waves and inside dynamics. J. Math. Biol. 77, 1649–1687 (2018). https://doi.org/10.1007/s00285-018-1206-1
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00285-018-1206-1
Keywords
- Integrodifference equation
- Persistence criterion
- Travelling wave
- Inside dynamics
- Neutral genetic diversity
- Diversity index