
Abstract
In mobile robotic swarms, the gathering problem consists in coordinating all the robots so that in finite time they occupy the same location, not known beforehand. Multiplicity detection refers to the ability to detect that more than one robot can occupy a given position. When the robotic swarm operates synchronously, a well-known result by Cohen and Peleg permits to achieve gathering, provided robots are capable of multiplicity detection. We present a new algorithm for synchronous gathering, that does not assume that robots are capable of multiplicity detection, nor make any other extra assumption. Unlike previous approaches, the correctness of our proof is certified in the model where the protocol is defined, using the Coq proof assistant.
Similar content being viewed by others



Notes
The 2016 SIROCCO Prize for Innovation in Distributed Computing was awarded to Masafumi Yamashita for this line of work.
References
Altisen, K., Corbineau, P., Devismes, S.: A framework for certified self-stabilization. In: Albert, E, Lanese, I (eds.) Formal Techniques for Distributed Objects, Components, and Systems - 36th IFIP WG 6.1 International Conference, FORTE 2016, Held as Part of the 11th International Federated Conference on Distributed Computing Techniques, DisCoTec 2016, Heraklion, Crete, Greece, June 6-9, 2016, Proceedings, volume 9688 of Lecture Notes in Computer Science, pp. 36–51. Springer (2016)
Auger, C., Bouzid, Z., Courtieu, P., Tixeuil, S., Urbain, X.: Certified impossibility results for byzantine-tolerant mobile robots. In: Higashino, T, Katayama, Y, Masuzawa, T, Potop-Butucaru, M, Yamashita, M (eds.) Stabilization, Safety, and Security of Distributed Systems - 15th International Symposium (SSS 2013), volume 8255 of Lecture Notes in Computer Science, pp. 178–186. Springer, Osaka (2013)
Balabonski, T., Courtieu, P., Rieg, L., Tixeuil, S., Urbain, X.: Certified gathering of oblivious mobile robots: Survey of recent results and open problems. In: Petrucci, L, Seceleanu, C, Cavalcanti, A (eds.) Critical Systems: Formal Methods and Automated Verification - Joint 22nd International Workshop on Formal Methods for Industrial Critical Systems - and - 17th International Workshop on Automated Verification of Critical Systems, (FMICS-AVoCS 2017), volume 10471 of Lecture Notes in Computer Science, pp. 165–181. Springer, Turin (2017)
Balabonski, T., Pelle, R., Rieg, L., Tixeuil, S.: A foundational framework for certified impossibility results with mobile robots on graphs. In: Proceedings of International Conference on Distributed Computing and Networking. Varanasi (2018)
Bérard, B., Lafourcade, P., Millet, L., Potop-Butucaru, M., Thierry-Mieg, Y., Tixeuil, S.: Formal verification of mobile robot protocols. Distrib. Comput. 29(6), 459–487 (2016)
Bertot, Y., Castéran, P.: Interactive theorem proving and program development. Coq’Art: The calculus of inductive constructions. Texts in Theoretical Computer Science. Springer (2004)
Bonnet, F., Dėfago, X., Petit, F., Potop-Butucaru, M., Tixeuil, S.: Discovering and assessing fine-grained metrics in robot networks protocols. In: 33rd IEEE International Symposium on Reliable Distributed Systems Workshops, SRDS Workshops 2014, pp. 50–59. IEEE, Nara (2014)
Bérard, B., Courtieu, P., Millet, L., Potop-Butucaru, M., Rieg, L., Sznajder, N., Tixeuil, S., Urbain, X.: Formal methods for mobile robots: Current results and open problems. Int. J. Inf. Soc. 7(3), 101–114 (2015). Invited Paper
Castėran, P., Filou, V.: Tasks, types and tactics for local computation systems. Studia Informatica Universalis 9(1), 39–86 (2011)
Cohen, R., Peleg, D.: Robot convergence via center-of-gravity algorithms. In: Kralovic, R, Sýkora, O (eds.) Structural Information and Communication Complexity - 11th International Colloquium (SIROCCO 2004), volume 3104 of Lecture Notes in Computer Science, pp. 79–88. Springer, Smolenice Castle (2004)
Cohen, R., Peleg, D.: Convergence properties of the gravitational algorithm in asynchronous robot systems. SIAM J. Comput. 34(6), 1516–1528 (2005)
Coquand, T., Paulin-Mohring, C.: Inductively defined types. In: Martin-Löf, P, Mints, G (eds.) International Conference on Computer Logic (Colog’88), volume 417 of Lecture Notes in Computer Science, pp. 50–66. Springer (1990)
Courtieu, P., Rieg, L., Tixeuil, S., Urbain, X.: Impossibility of gathering, a certification. Inf. Process. Lett. 115, 447–452 (2015)
Courtieu, P., Rieg, L., Tixeuil, S., Urbain, X.: Certified universal gathering algorithm in \(\mathbb {R}^{2}\) for oblivious mobile robots. In: Gavoille, C, Ilcinkas, D (eds.) Distributed Computing - 30th International Symposium, (DISC 2016), volume 9888 of Lecture Notes in Computer Science. Springer, Paris (2016)
Devismes, S., Lamani, A., Petit, F., Raymond, P., Tixeuil, S.: Optimal Grid Exploration by Asynchronous Oblivious Robots. In: Richa, A W, Scheideler, C (eds.) Stabilization, Safety, and Security of Distributed Systems - 14th International Symposium (SSS 2012), volume 7596 of Lecture Notes in Computer Science, pp. 64–76. Springer, Toronto (2012)
Doan, HTT., Bonnet, F., Ogata, K.: Model checking of robot gathering. In: Aspnes, J., Felber, P. (eds.) Principles of Distributed Systems - 21th International Conference (OPODIS 2017), Leibniz International Proceedings in Informatics (LIPIcs). Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik, Lisbon (2017)
Flocchini, P., Prencipe, G., Santoro, N.: Distributed Computing by Oblivious Mobile Robots. Synthesis Lectures on Distributed Computing Theory. Morgan & Claypool Publishers (2012)
Millet, L., Potop-Butucaru, M., Sznajder, N., Tixeuil, S.: On the synthesis of mobile robots algorithms: The case of ring gathering. In: Felber, P., Garg, V.K. (eds.) Stabilization, Safety, and Security of Distributed Systems - 16th International Symposium, (SSS 2014), volume 8756 of Lecture Notes in Computer Science, pp. 237–251. Springer, Paderborn (2014)
Prencipe, G.: Impossibility of gathering by a set of autonomous mobile robots. Theor. Comput. Sci. 384(2-3), 222–231 (2007)
Rubin, S., Zuleger, F., Murano, A., Aminof, B.: Verification of asynchronous mobile-robots in partially-known environments. In: Chen, Q., Torroni, P., Villata, S., Hsu, J.Y.-j., Omicini, A. (eds.) PRIMA 2015: Principles and Practice of Multi-Agent Systems - 18th International Conference, Bertinoro, Italy, October 26-30, 2015, Proceedings, volume 9387 of Lecture Notes in Computer Science, pp. 185–200. Springer (2015)
Sangiorgi, D.: Introduction to Bisimulation and Coinduction. Cambridge University Press (2012)
Sangnier, A., Sznajder, N., Potop-Butucaru, M., Tixeuil, S.: Parameterized verification of algorithms for oblivious robots on a ring. In: Formal Methods in Computer Aided Design. Vienna (2017)
Suzuki, I., Yamashita, M.: Distributed Anonymous Mobile Robots: Formation of Geometric Patterns. SIAM J. Comput. 28(4), 1347–1363 (1999)
Acknowledgements
The authors are grateful to the reviewers who provided constructive comments and helped to improve the presentation of this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
This article is part of the Topical Collection on Special Issue on Stabilization, Safety, and Security of Distributed Systems (SSS 2016)
Appendix: Axioms of the formalisation
Appendix: Axioms of the formalisation
In the main file Gathering/InR2/FSyncFlexNoMultAlgorithm.v, the last command: Print Assumptions Gathering_in_R2 shows all the axioms upon which the proof of correctness of our algorithm for gathering in \({\mathbb {R}}^{2}\) relies, in total 31 axioms. Here, we break them down. They can be classified in three categories:
-
The first category is the axiomatisation of reals numbers from the Coq standard library. It represents by far the biggest number of axioms (26), and they are not listed here.
-
The second category is the description of the problem.
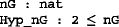
As one can see, it simply means that our proof is valid for any number nG of robots greater than or equal to 2. Notice that with one robot or less, the problem is not interesting (trivially solved).
-
The third category contains three usual geometric properties that are not part of our library. These three axioms are the only ones which could be seen as real axioms to be proved, the previous two categories being the parameters of the problem. On the one hand, there are some properties about barycentres that we think could be provable from its axiomatisation but are currently left as axioms: that the barycentre is unique and that the result of the function computing the barycentre is indeed a barycentre:

On the other hand, there is the proof that similarities can be expressed with an orthogonal matrix M, a zoom factor λ and a translation t: for any similarity s, we can find \(M \in \mathcal {O}_{2}(\mathbb {R})\), \(\lambda \in \mathbb {R}^{+}\) and \(t \in \mathbb {R}^{2}\) such that s = λM + t. For convenience, the orthogonal matrix and the zoom factor are combined into two column vectors u and v: we have λM = (u v) with u ⊥ v and ∥u∥ = ∥v∥ = λ.
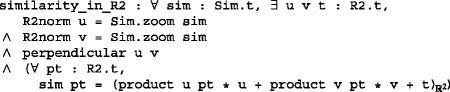
These types of axioms can be discharged through the connection with Coq libraries dedicated to geometry.



Rights and permissions
About this article

Cite this article
Balabonski, T., Delga, A., Rieg, L. et al. Synchronous Gathering without Multiplicity Detection: a Certified Algorithm. Theory Comput Syst 63, 200–218 (2019). https://doi.org/10.1007/s00224-017-9828-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00224-017-9828-z