
Abstract
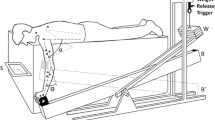
In this study, the equilibrium-point hypothesis of muscle-torque generation is used to evaluate the changes in central control parameters in the process of postural-maintenance learning. Muscle torque is described by a linear spring equation with modifiable stiffness, viscosity, and equilibrium angle. The stiffness is considered to be the estimation of the central command for antagonist-muscle coactivation and the equilibrium angle to be the estimation of the reciprocal command for a shift of invariant characteristics of the joint. In the experiments, a load applied to the forearm was released. The subjects were instructed to maintain their forearm in the initial horizontal position. Five sessions of approximately twenty trials each were carried out by eight subjects. During two ”control” series, the load release was triggered by the experimenter. During three ”learning” series, the load supported by one forearm was released by the subject’s other hand. The elbow-joint angle, the angular acceleration, and the external load on the postural forearm were recorded. These recordings as well as anthropometric forearm characteristics were used to calculate the elbow-joint torque (which we called ”experimental”). Linear regression analysis was performed to evaluate the equilibrium angle, joint stiffness, and viscosity at each trial. The ”theoretical” torque was calculated using a linear spring equation with the found parameters. The good agreement observed between experimental and theoretical joint-torque time courses, apart from the very early period following unloading, argues in favor of the idea that the movement was mainly performed under a constant central command presetting the joint stiffness and the equilibrium angle. An overall increase in the stiffness occurred simultaneously with a decrease in the equilibrium angle during the ”learning” series in all the subjects. This suggests that subjects learn to compensate for the disturbing effects of unloading by increasing the joint stiffness. The mechanism possibly responsible for the presetting of the central control parameters is discussed.
Similar content being viewed by others


Author information
Authors and Affiliations
Additional information
Received: 19 August 1997 / Accepted: 22 June 1998
Rights and permissions
About this article
Cite this article
Biryukova, E., Roschin, V., Frolov, A. et al. Forearm postural control during unloading: anticipatory changes in elbow stiffness. Exp Brain Res 124, 107–117 (1999). https://doi.org/10.1007/s002210050605
Issue Date:
DOI: https://doi.org/10.1007/s002210050605