
Abstract
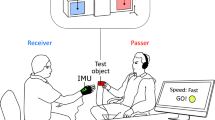
The goal of the present study was to investigate how grip forces are applied when transferring stable control of an object from one person to another. We asked how grip forces would be modified by the passer to (1) control for inertial forces as the object was transported toward the receiver and (2) control for the impending perturbation when the receiver made contact with the object. Twelve volunteers worked in pairs during this experiment. One partner, playing the role of passer, transported an object with embedded load cells forward or held the object at an interception location. The second partner, playing the role of receiver, waited at an interception location or reached toward the passed object. Kinematic results indicated that while passers performed a stereotypical movement, receivers were sensitive to the motion of the object as they reached to make contact. Grip force results indicated that passers’ grip forces and grip/load force ratios were variable on a trial-to-trial basis, suggesting that a refined internal model of the passing task was not achieved within the timeframe of the experiment. Furthermore, a decoupling of the temporal and magnitude characteristics of the grip and inertial forces was noted in conditions where passers transported the object toward the receiver. During object transfer, it was noted that passers used visual feedback-based anticipatory control to precisely time initial grip force release, while somatosensory control was used by both the passer and receiver to precisely coordinate transfer rate.








Similar content being viewed by others

Notes
Note: slip forces were quantified post hoc on two subjects (including the primary author). We quantified slip force by having subjects hold the object such that it could be maintained parallel to the table surface for two seconds and then slowly release the object until it began to rotate. Results indicated that hold forces were consistent with data presented in the current experiment (4–7 N range) and slip forces varied between 2.8 N and 4.5 N. Thus, on average, the safety margin utilized by subjects in the current experiment was between 2 N and 4 N
References
Bootsma RJ, Peper CLE (1992) Predictive visual information sources for the regulation of action with special emphasis on catching and hitting. In: Proteau L, Elliott D (eds) Vision and motor control. North-Holland, Amsterdam, pp 285–314
Burstedt MKO, Edin BB, Johansson RS (1997) Coordination of fingertip forces during human manipulation can emerge from independent neural networks controlling each engaged digit. Exp Brain Res 117:67–79
Carnahan H, McFadyen BJ (1996) Visuomotor control when reaching toward and grasping moving targets. Acta Psychol 92:17–32
Churchill A, Vogt S, Hopkins B (1999) The coordination of two-effector actions: spoon-feeding and intermanual prehension. Br J Psychol 90:271–290
Cutkosky MR, Hyde JM (1993) Manipulation control with dynamic tactile sensing. In: 6th Int Symp on Robotics Research, 1–5 October 1993, Hidden Valley, PA
Flanagan JR, Wing AM (1993) Modulation of grip force with load force during point to point arm movements. Exp Brain Res 95:131–143
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand held loads. J Neurosci 17:1519–1528
Imamizu H, Uno Y, Kawato M (1995) Internal representations of the motor apparatus: implications from generalization in visuomotor learning. J Exp Psychol 21:1174–1198
Johansson RS, Westling G (1988) Programmed and triggered actions to rapid load changes during precision grip. Exp Brain Res 71:72–86
Kinoshita H, Kawai S, Ikuta K, Teraoka T (1996) Individual finger forces acting on a grasped object during shaking actions. Ergonomics 39:243–256
Lacquaniti F (1996) Neural control of limb mechanics for visuomanual coordination. In: Wing AW, Haggard P, Flannagan JR (eds) Hand and brain. Academic, New York, pp 213–231
MacKenzie CL, Iberall T (1994) The grasping hand. Elsevier, Amsterdam
Marteniuk RG, MacKenzie CL, Jeannerod M, Athenes S, Dugas C (1987) Constraints on human arm trajectories. Can J Psychol 41:365–378
Mason AH, Carnahan H (1999) Target viewing time and velocity effects on prehension. Exp Brain Res 127:83–94
Mottet D, Guiard Y, Ferrand T, Bootsma RJ (2001) Two-handed performance of a rhythmical Fitts task by individuals and dyads. J Exp Psychol Hum Percept Perform 27:1275–1286
Nowak DA (2004) Different modes of grip force control: voluntary and externally guided arm movements with a hand-held load. Clin Neurophys 115(4):839–848
Nowak DA, Hermsdorfer J (2004) Predictability influences finger force control when catching a free-falling object. Exp Brain Res 154:411–416
Nowak DA, Hermsdorfer J, Marquardt C, Topka H, (2003) Moving objects with clumsy fingers: how predictive is grip force control in patients with impaired manual sensibility? Clin Neurophys 114(3):472–487
Schmidt RS, Carello C, Turvey MT (1990) Phase transitions and critical fluctuation in the visual coordination of rhythmic movements between people. J Exp Psychol Hum Percept Perform 16:227–247
Schmidt RS, Bienvenu M, Fitzpatrick PA, Amazeen PG (1998) A comparison of intra- and interpersonal interlimb coordination: coordination breakdowns and coupling strength. J Exp Psychol Hum Percept Perform 24:884–900
Serrien DJ, Wiesendanger M (2001) Bimanual organization of manipulative forces: evidence from erroneous feedforward programming of precision grip. Eur J Neurosci 13:1825–1832
Simoneau M, Paillard J, Bard C, Teasdale N, Martin O, Fleury M, Lamarre Y (1999) Role of the feedforward command and reafferent information in the coordination of a passing prehension task. Exp Brain Res 128:236–242
Turrell YN, Li FX, Wing AM (1999) Grip force dynamics in the approach to a collision. Exp Brain Res 128:86–91
Wing AM, Haggard P, Flannagan JR (1996) Hand and brain. Academic, New York
Wolpert DM, Ghahramani Z (2000) Computational principles of movement neuroscience. Nat Neurosci 3:1212–1217
Wolpert DM, Kawato M (1998) Multiple paired forward and inverse models for motor control. Neural Netw 11:1317–1329
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Mason, A.H., MacKenzie, C.L. Grip forces when passing an object to a partner. Exp Brain Res 163, 173–187 (2005). https://doi.org/10.1007/s00221-004-2157-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-2157-x