
Abstract
For any \(H \in (0,\frac{1}{2})\), we construct complete, non-proper, stable, simply-connected surfaces embedded in \({\mathbb H}^2\times {\mathbb R}\) with constant mean curvature H.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In their ground breaking work [2], Colding and Minicozzi proved that complete minimal surfaces embedded in \( \mathbb {R}^3\) with finite topology are proper. Based on the techniques in [2], Meeks and Rosenberg [5] then proved that complete minimal surfaces with positive injectivity embedded in \({\mathbb {R}}^3\) are proper. More recently, Meeks and Tinaglia [7] proved that complete constant mean curvature surfaces embedded in \(\mathbb {R}^3\) are proper if they have finite topology or have positive injectivity radius.
In contrast to the above results, in this paper we prove the following existence theorem for non-proper, complete, simply-connected surfaces embedded in \({\mathbb H}^2\times {\mathbb R}\) with constant mean curvature \(H\in (0,1/2)\). The convention used here is that the mean curvature function of an oriented surface M in an oriented Riemannian three-manifold N is the pointwise average of its principal curvatures.
The catenoids in \({\mathbb H}^2\times {\mathbb R}\) mentioned in the next theorem are defined at the beginning of Sect. 2.1.
Theorem 1.1
For any \(H\in (0,1/2)\) there exists a complete, stable, simply-connected surface \(\Sigma _H\) embedded in \({\mathbb H}^2\times {\mathbb R}\) with constant mean curvature H satisfying the following properties:
-
(1)
The closure of \(\Sigma _H\) is a lamination with three leaves, \(\Sigma _H\), \(C_1\) and \(C_2\), where \(C_1\) and \(C_2\) are stable catenoids of constant mean curvature H in \({\mathbb {H}}^3\) with the same axis of revolution L. In particular, \(\Sigma _{H}\) is not properly embedded in \({\mathbb H}^2\times {\mathbb R}\).
-
(2)
Let \(K_L\) denote the Killing field generated by rotations around L. Every integral curve of \(K_L\) that lies in the region between \(C_1\) and \(C_2\) intersects \(\Sigma _H\) transversely in a single point. In particular, the closed region between \(C_1\) and \(C_2\) is foliated by surfaces of constant mean curvature H, where the leaves are \(C_1\) and \(C_2\) and the rotated images \(\Sigma _H ({\theta })\) of \(\Sigma \) around L by angle \(\theta \in [0,2\pi )\).
When \(H=0\), Rodríguez and Tinaglia [10] constructed non-proper, complete minimal planes embedded in \({\mathbb H}^2\times {\mathbb R}\). However, their construction does not generalize to produce complete, non-proper planes embedded in \({\mathbb H}^2\times {\mathbb R}\) with non-zero constant mean curvature. Instead, the construction presented in this paper is related to the techniques developed by the authors in [3] to obtain examples of non-proper, stable, complete planes embedded in \({\mathbb {H}}^3\) with constant mean curvature H, for any \(H\in [0,1)\).
There is a general conjecture related to Theorem 1.1 and the previously stated positive properness results. Given X a Riemannian three-manifold, let \({\mathrm{Ch}}(X):= \inf _{S\in \mathcal {S}} \frac{\text {Area}(\partial S)}{\text {Volume}(S)},\) where \(\mathcal {S}\) is the set of all smooth compact domains in X. Note that when the volume of X is infinite, \(\hbox {Ch}(X)\) is the Cheeger constant.
Conjecture 1.2
Let X be a simply-connected, homogeneous three-manifold. Then for any \(H\ge \frac{1}{2}\hbox {Ch}(X)\), every complete, connected H-surface embedded in X with positive injectivity radius or finite topology is proper. On the other hand, if \(\hbox {Ch}(X)>0\), then there exist non-proper complete H-planes in X for every \(H\in [0,\frac{1}{2} \hbox {Ch}(X))\).
By the work in [2], Conjecture 1.2 holds for \(X=\mathbb {R}^3\) and it holds in \({\mathbb {H}}^3\) by work in progress in [6]. Since the Cheeger constant of \({\mathbb H}^2\times {\mathbb R}\) is 1, Conjecture 1.2 would imply that Theorem 1.1 (together with the existence of complete non-proper minimal planes embedded in \({\mathbb H}^2\times {\mathbb R}\) found in [10]) is a sharp result.
2 Preliminaries
In this section, we will review the basic properties of H-surfaces, a concept that we next define. We will call a smooth oriented surface \(\Sigma _H\) in \({\mathbb H}^2\times {\mathbb R}\) an H-surface if it is embedded and its mean curvature is constant equal to H; we will assume that \(\Sigma _H\) is appropriately oriented so that H is non-negative. We will use the cylinder model of \({\mathbb H}^2\times {\mathbb R}\) with coordinates \((\rho , \theta , t)\); here \(\rho \) is the hyperbolic distance from the origin (a chosen base point) in \(\mathbb H^2_0\), where \(\mathbb H^2_t\) denotes \(\mathbb H^2\times \{t\}\). We next describe the H-catenoids mentioned in the Introduction.
The following H-catenoids family will play a particularly important role in our construction.
2.1 Rotationally invariant vertical H-catenoids \(\mathcal {C}^H_d\)
We begin this section by recalling several results in [8, 9]. Given \(H\in (0,\frac{1}{2})\) and \(d\in [-2H,\infty )\), let
and let \(\lambda _d:[\eta _d,\infty )\rightarrow [0,\infty )\) be the function defined as follows.
Note that \(\lambda _d(\rho )\) is a strictly increasing function with \(\lim _{\rho \rightarrow \infty }\lambda _d(\rho )= \infty \) and derivative \(\lambda '_d(\eta _d)=\infty \) when \(d\in (-2H,\infty )\).
In [8] Nelli, Sa Earp, Santos and Toubiana proved that there exists a 1-parameter family of embedded H-catenoids \(\{\mathcal {C}^H_d \ | \ d\in (-2H,\infty )\}\) obtained by rotating a generating curve \(\lambda _d(\rho )\) about the t-axis. The generating curve \(\widehat{\lambda }_d \) is obtained by doubling the curve \((\rho , 0, \lambda _d(\rho ))\), \(\rho \in [\eta _d,\infty )\), with its reflection \((\rho , 0, -\lambda _d(\rho ))\), \(\rho \in [\eta _d,\infty )\). Note that \(\widehat{\lambda }_d\) is a smooth curve and that the necksize, \(\eta _d\), is a strictly increasing function in d satisfying the properties that \(\eta _{-2H}=0\) and \(\lim _{d\rightarrow \infty }\eta _d=\infty \).
If \(d=-2H\), then by rotating the curve \((\rho , 0, \lambda _d(\rho ))\) around the t-axis one obtains a simply-connected H-surface \(E_H\) that is an entire graph over \(\mathbb H^2_0\). We denote by \(-E_H\) the reflection of \(E_H\) across \(\mathbb H^2_0\).
We next recall the definition of the mean curvature vector.
Definition 2.1
Let M be an oriented surface in an oriented Riemannian three-manifold and suppose that M has non-zero mean curvature H(p) at p. The mean curvature vector at p is \( \mathbf {H}(p):=H(p)N(p)\), where N(p) is its unit normal vector at p. The mean curvature vector \(\mathbf {H}(p)\) is independent of the orientation on M.
Note that the mean curvature vector \(\mathbf {H}\) of \(\mathcal {C}^H_d\) points into the connected component of \({\mathbb H}^2\times {\mathbb R}-\mathcal {C}^H_d\) that contains the t-axis. The mean curvature vector of \(E_H\) points upward while the mean curvature vector of \(-E_H\) points downward.
In order to construct the examples described in Theorem 1.1, we first obtain certain geometric properties satisfied by H-catenoids. For example, in the following lemma, we show that for certain values of \(d_1\) and \(d_2\), the catenoids \(\mathcal {C}^H_{d_1}\) and \(\mathcal {C}^H_{d_2}\) are disjoint.
Given \(d\in (-2H,\infty )\), let \(b_{d}(t):=\lambda _d^{-1}(t)\) for \(t\ge 0\); note that \(b_d(0)=\eta _{d}\). Abusing the notation let \(b_d(t):=b_d(-t)\) for \(t\le 0\).
Lemma 2.1
(Disjoint H-catenoids) Given \(d_1>2\), there exist \(d_0>d_1\) and \(\delta _0>0\) such that for any \(d_2\in [d_0,\infty )\), then
In particular, the corresponding H-catenoids are disjoint, i.e. \(\mathcal {C}^H_{d_1}\cap \mathcal {C}^H_{d_2}=\emptyset \).
Moreover, \(b_{d_2}(t)-b_{d_1}(t)\) is decreasing for \(t>0\) and increasing for \(t<0\). In particular,
The proof of the above lemma requires a rather lengthy computation that is given in the Appendix.
We next recall the well-known mean curvature comparison principle.
Proposition 2.2
(Mean curvature comparison principle) Let \(M_1\) and \(M_2\) be two complete, connected embedded surfaces in a three-dimensional Riemannian manifold. Suppose that \(p\in M_1\cap M_2\) satisfies that a neighborhood of p in \(M_1\) locally lies on the side of a neighborhood of p in \(M_2\) into which \(\mathbf {H}_2(p)\) is pointing. Then \(|H_1|(p)\ge |H_2|(p)\). Furthermore, if \(M_1\) and \(M_2\) are constant mean curvature surfaces with \(|H_1|=|H_2|\), then \(M_1 =M_2\).
3 The examples
For a fixed \(H\in (0,1/2)\), the outline of construction is as follows. First, we will take two disjoint H-catenoids \(\mathcal {C}_1\) and \(\mathcal {C}_2\) whose existence is given in Lemma 2.1. These catenoids \(\mathcal {C}_1\), \( \mathcal {C}_2\) bound a region \(\Omega \) in \({\mathbb H}^2\times {\mathbb R}\) with fundamental group \(\mathbb {Z}\). In the universal cover \(\widetilde{\Omega }\) of \(\Omega \), we define a piecewise smooth compact exhaustion \(\Delta _1\subset \Delta _2\subset \cdots \subset \Delta _n\subset \cdots \) of \(\widetilde{\Omega }\). Then, by solving the H-Plateau problem for special curves \(\Gamma _n\subset \partial \Delta _n\), we obtain minimizing H-surfaces \(\Sigma _n\) in \(\Delta _n\) with \(\partial \Sigma _n=\Gamma _n\). In the limit set of these surfaces, we find an H-plane \(\mathcal {P}\) whose projection to \(\Omega \) is the desired non-proper H-plane \(\Sigma _H\subset {\mathbb {H}}^2\times \mathbb {R}\).
3.1 Construction of \(\widetilde{\Omega }\)
Fix \(H\in (0,\frac{1}{2})\) and \(d_1,d_2\in (2,\infty )\), \(d_1<d_2\), such that by Lemma 2.1, the related H-catenoids \(\mathcal {C}^H_{d_1}\) and \(\mathcal {C}^H_{d_2}\) are disjoint; note that in this case, \(\mathcal {C}_{d_1}^H\) lies in the interior of the simply-connected component of \({\mathbb H}^2\times {\mathbb R}-\mathcal {C}^H_{d_2}\). We will use the notation \(\mathcal {C}_i:= \mathcal {C}^H_{d_i}\). Recall that both catenoids have the same rotational axis, namely the t-axis, and recall that the mean curvature vector \(\mathbf {H}_i\) of \(\mathcal {C}_i\) points into the connected component of \({\mathbb H}^2\times {\mathbb R}-\mathcal {C}_i\) that contains the t-axis. We emphasize here that H is fixed and so we will omit describing it in future notations.
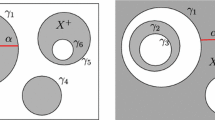
Let \(\Omega \) be the closed region in \({\mathbb H}^2\times {\mathbb R}\) between \(\mathcal {C}_1\) and \(\mathcal {C}_2\), i.e., \(\partial \Omega = \mathcal {C}_1\cup \mathcal {C}_2\) (Fig. 1-left). Notice that the set of boundary points at infinity \(\partial _{\infty }\Omega \) is equal to \(S^1_{\infty }\times \{-\infty \} \cup S^1_{\infty }\times \{\infty \}\), i.e., the corner circles in \(\partial _\infty {\mathbb H}^2\times {\mathbb R}\) in the product compactification, where we view \({\mathbb {H}}^2\) to be the open unit disk \(\{(x,y)\in \mathbb {R}^2 \mid x^2+y^2<1\}\) with base point the origin \(\vec {0}\).

The induced coordinates \((\rho , \widetilde{\theta }, t)\) in \(\widetilde{\Omega }\)
By construction, \(\Omega \) is topologically a solid torus. Let \(\widetilde{\Omega }\) be the universal cover of \(\Omega \). Then, \(\partial \widetilde{\Omega } = \widetilde{\mathcal {C}}_1\cup \widetilde{\mathcal {C}}_2\) (Fig. 1-right), where \(\widetilde{\mathcal {C}}_1,\widetilde{\mathcal {C}}_2\) are the respective lifts to \(\widetilde{\Omega }\) of \({\mathcal {C}}_1, {\mathcal {C}}_2\). Notice that \(\widetilde{\mathcal {C}}_1\) and \(\widetilde{\mathcal {C}}_2\) are both H-planes, and the mean curvature vector \(\mathbf {H}\) points outside of \(\widetilde{\Omega }\) along \(\widetilde{\mathcal {C}}_1\) while \(\mathbf {H}\) points inside of \(\widetilde{\Omega }\) along \(\widetilde{\mathcal {C}}_2\). We will use the induced coordinates \((\rho , \widetilde{\theta }, t)\) on \(\widetilde{\Omega }\) where \(\widetilde{\theta }\in (-\infty , \infty )\). In particular, if
is the covering map, then \(\Pi (\rho _o, \widetilde{\theta }_o, t_o)= (\rho _o, \theta _o, t_o)\) where \(\theta _o\equiv \widetilde{\theta _o} \mod 2\pi \).
Recalling the definition of \(b_i(t)\), \(i=1,2\), note that a point \((\rho , \theta , t)\) belongs to \(\Omega \) if and only if \(\rho \in [b_1(t), b_2(t)]\) and we can write
3.2 Infinite bumps in \(\widetilde{\Omega }\)
Let \(\gamma \) be the geodesic through the origin in \(\mathbb H^2_0\) obtained by intersecting \(\mathbb H^2_0\) with the vertical plane \(\{\theta =0\} \cup \{\theta =\pi \}\). For \(s\in [0,\infty )\), let \(\varphi _s\) be the orientation preserving hyperbolic isometry of \(\mathbb H^2_0\) that is the hyperbolic translation along the geodesic \(\gamma \) with \(\varphi _s(0,0)=(s,0)\). Let
be the related extended isometry of \({\mathbb H}^2\times {\mathbb R}\).
Let \(\mathcal {C}_d\) be an embedded H-catenoid as defined in Sect. 2.1. Notice that the rotation axis of the H-catenoid \(\widehat{\varphi }_{s_0}(\mathcal {C}_d)\) is the vertical line \(\{ (s_0, 0, t) \mid t\in \mathbb R\}\).
Let \(\delta :=\inf _{t\in \mathbb R}(b_2(t)-b_1(t))\), which gives an upper bound estimate for the asymptotic distance between the catenoids; recall that by our choices of \(\mathcal {C}_1,\mathcal {C}_2\) given in Lemma 2.1, we have \(\delta >0\). Let \(\delta _1=\frac{1}{2}\min \{\delta , \eta _1\}\) and let \(\delta _2=\delta -\frac{\delta _1}{2}\). Let \(\widehat{\mathcal {C}}_{1}:=\widehat{\varphi }_{\delta _1}(\mathcal {C}_1)\) and \(\widehat{\mathcal {C}}_{2}:=\widehat{\varphi }_{-\delta _2}(\mathcal {C}_2)\). Note that \(\delta _1+\delta _2>\delta \).
Claim 3.1
The intersection \(\Omega \cap \widehat{\mathcal {C}}_{i}\), \(i=1,2\), is an infinite strip.
Proof
Given \(t\in \mathbb R\), let \(\mathbb H^2_t\) denote \(\mathbb H^2\times \{t\}\). Let \(\tau ^i_t:=\mathcal {C}_i\cap \mathbb H^2_t\) and \(\widehat{\tau }^i_t:=\widehat{\mathcal {C}}_i\cap \mathbb H^2_t\). Note that for \(i=1,2\), \(\tau ^i_t\) is a circle in \(\mathbb H^2_t\) of radius \(b_i(t)\) centered at (0, 0, t) while \(\widehat{\tau }^1_t\) is a circle in \(\mathbb H^2_t\) of radius \(b_1(t)\) centered at \(p_{1,t}:=(\delta _1,0,t)\) and \(\widehat{\tau }^2_t\) is a circle in \(\mathbb H^2_t\) of radius \(b_2(t)\) centered at \(p_{2,t}:=(-\delta _2,0,t)\). We claim that for any \(t\in \mathbb R\), the intersection \(\widehat{\tau }^i_t\cap \Omega \) is an arc with end points in \(\tau ^i_t\), \(i=1,2\). This result would give that \(\Omega \cap \widehat{\mathcal {C}}_{i}\) is an infinite strip. We next prove this claim.
Consider the case \(i=1\) first. Since \(\delta _1<\eta _1\le b_1(t)\), the center \(p_{1,t}\) is inside the disk in \(\mathbb H^2_t\) bounded by \(\tau ^1_t\). Since the radii of \(\tau ^1_t\) and \(\widehat{\tau }^1_t\) are both equal to \(b_1(t)\), then the intersection \(\tau ^1_t\cap \widehat{\tau }^1_t\) is nonempty. It remains to show that \(\widehat{\tau }^1_t\cap \tau ^2_t=\emptyset \), namely that \(b_1(t)+\delta _1<b_2(t)\). This follows because
This argument shows that \(\Omega \cap \widehat{\mathcal {C}}_{1}\) is an infinite strip.
Consider now the case \(i=2\). Since \(\delta _2<\delta < b_2(t)\), the center \(p_{2,t}\) is inside the disk in \(\mathbb H^2_t\) bounded by \(\tau ^2_t\). Since the radii of \(\tau ^2_t\) and \(\widehat{\tau }^2_t\) are both equal to \(b_2(t)\), then the intersection \(\tau ^2_t\cap \widehat{\tau }^2_t\) is nonempty. It remains to show that \(\tau ^1_t\cap \widehat{\tau }^2_t=\emptyset \), namely that \(b_2(t)-\delta _2>b_1(t)\). This follows because
This completes the proof that \(\Omega \cap \widehat{\mathcal {C}}_{2}\) is an infinite strip and finishes the proof of the claim. \(\square \)

The position of the bumps \(\mathcal {B}^\pm \) in \(\widetilde{\Omega }\) is shown in the picture. The small arrows show the mean curvature vector direction. The H-surfaces \(\Sigma _n\) are disjoint from the infinite strips \(\mathcal {B}^\pm \) by construction
Now, let \(Y^+:=\Omega \cap \widehat{\mathcal {C}}_2\) and let \(Y^-:=\Omega \cap \widehat{\mathcal {C}}_1\). In light of Claim 3.1 and its proof, we know that \(Y^+\cap \mathcal {C}_1=\emptyset \) and \(Y^-\cap \mathcal {C}_2=\emptyset \).
Remark 3.2
Note that by construction, any rotational surface contained in \(\Omega \) must intersect \(\widehat{\mathcal {C}}_{1}\cup \widehat{\mathcal {C}}_{2}\). In particular, \(Y^+\cup Y^-\) intersects all H-catenoids \(\mathcal {C}_d\) for \(d\in (d_1,d_2)\) as the circles \(\mathcal {C}_d\cap \mathbb H^2_t\) intersect either the circle \(\widehat{\tau }^2_t\) or the circle \(\widehat{\tau }^1_t\) for some \(t>0\) since \(\delta _1+\delta _2>\delta \).
In \(\widetilde{\Omega }\), let \(\mathcal {B}^+\) be the lift of \(Y^+\) in \(\widetilde{\Omega }\) which intersects the slice \(\{\widetilde{\theta }=-10\pi \}\). Similarly, let \(\mathcal {B}^-\) be the lift of \(Y^-\) in \(\widetilde{\Omega }\) which intersects the slice \(\{\widetilde{\theta }=10\pi \}\). Note that each lift of \(Y^+\) or \(Y^-\)is contained in a region where the \(\widetilde{\theta }\) values of their points lie in ranges of the form \((\theta _0-\pi ,\theta _0+ \pi )\) and so \(\mathcal {B}^+\cap \mathcal {B}^-=\emptyset \). See Fig. 2.
The H-surfaces \(\mathcal {B}^\pm \) near the top and bottom of \(\widetilde{\Omega }\) will act as barriers (infinite bumps) in the next section, ensuring that the limit H-plane of a certain sequence of compact H-surfaces does not collapse to an H-lamination of \(\widetilde{\Omega }\) all of whose leaves are invariant under translations in the \(\widetilde{\theta }\)-direction.
Next we modify \(\widetilde{\Omega }\) as follows. Consider the component of \(\widetilde{\Omega }-(\mathcal {B}^+\cup \mathcal {B}^-)\) containing the slice \(\{\widetilde{\theta }=0\}\). From now on we will call the closure of this region \(\widetilde{\Omega }^*\).
3.3 The compact exhaustion of \(\widetilde{\Omega }^*\)
Consider the rotationally invariant H-planes \(E_H,-E_H\) described in Sect. 2. Recall that \(E_H\) is a graph over the horizontal slice \(\mathbb H^2_0\) and it is also tangent to \(\mathbb H^2_0\) at the origin. Given \(t\in \mathbb R\), let \(E_H^t=-E_H+(0,0,t)\) and \(-E_H^t=E_H-(0,0,t)\). Both families \(\{E_H^t\}_{t\in \mathbb R}\) and \(\{-E_H^t\}_{t\in \mathbb R}\) foliate \({\mathbb H}^2\times {\mathbb R}\). Moreover, there exists \(n_0\in \mathbb N\) such that for any \(n>n_0\), \(n\in \mathbb N\), the following holds. The highest (lowest) component of the intersection \(S_n^+:=E_H^n\cap \Omega \) (\(S_n^-:=-E_H^n\cap \Omega \)) is a rotationally invariant annulus with boundary components contained in \(\mathcal {C}_1\) and \(\mathcal {C}_2\). The annulus \(S_n^+\) lies “above” \(S_n^-\) and their intersection is empty. The region \(\mathcal {U}_n\) in \(\Omega \) between \(S_n^+\) and \(S_n^-\) is a solid torus, see Fig. 3-left, and the mean curvature vectors of \(S_n^+\) and \(S_n^-\) point into \(\mathcal {U}_n\).

\(\mathcal {U}_n = \Omega \cap \widehat{\mathcal {U}}_n\) and \(\widetilde{\mathcal {U}}_n\) denotes its universal cover. Note that \(\partial \widetilde{\mathcal {U}}_n\subset \widetilde{\mathcal {C}}_1\cup \widetilde{\mathcal {C}}_2\cup \widetilde{S}^+_n\cup \widetilde{S}^-_n\)
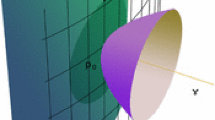
Let \(\widetilde{\mathcal {U}}_n\subset \widetilde{\Omega }\) be the universal cover of \(\mathcal {U}_n\), see Fig. 3-right. Then, \(\partial \widetilde{\mathcal {U}}_n- \partial \widetilde{\Omega }= \widetilde{S}_n^+\cup \widetilde{S}_n^-\) where can view \(\widetilde{S}_n^\pm \) as a lift to \(\widetilde{\mathcal {U}}_n\) of the universal cover of the annulus \(S_n^\pm \). Hence, \(\widetilde{S}_n^\pm \) is an infinite H-strip in \(\widetilde{\Omega }\), and the mean curvature vectors of the surfaces \(\widetilde{S}_n^+, \widetilde{S}_n^-\) point into \(\widetilde{\mathcal {U}}_n\) along \(\widetilde{S}_n^\pm \). Note that each \(\widetilde{\mathcal {U}}_n\) has bounded t-coordinate. Furthermore, we can view \(\widetilde{\mathcal {U}}_n\) as \((\mathcal {U}_n\cap \mathcal {P}_0)\times \mathbb R\), where \(\mathcal {P}_0\) is the half-plane \(\{\theta =0\}\) and the second coordinate is \(\widetilde{\theta }\). Abusing the notation, we redefine \(\widetilde{\mathcal {U}}_n\) to be \(\widetilde{\mathcal {U}}_n\cap \widetilde{\Omega }^*\), that is we have removed the infinite bumps \(\mathcal {B}^\pm \) from \(\widetilde{\mathcal {U}}_n\).
Now, we will perform a sequence of modifications of \(\widetilde{\mathcal {U}}_n\) so that for each of these modifications, the \(\widetilde{\theta }\)-coordinate in \(\widetilde{\mathcal {U}}_n\) is bounded and so that we obtain a compact exhaustion of \(\widetilde{\Omega }^*\). In order to do this, we will use arguments that are similar to those in Claim 3.1. Recall that the necksize of \(\mathcal {C}_2\) is \(\eta _2=b_2(0)\). Let \(\widehat{\mathcal {C}}_3= \widehat{\varphi }_{\eta _2}(\mathcal {C}_2)\), see equation (3) for the definition of \(\widehat{\varphi }_{\eta _2}\). Then, \(\widehat{\mathcal {C}}_3\) is a rotationally invariant catenoid whose rotational axis is the line \((\eta _2, 0)\times \mathbb R\) (Fig. 4-left).
Lemma 3.3
The intersection \(\widehat{\mathcal {C}}_3\cap \Omega \) is a pair of infinite strips.
Proof
It suffices to show that \(\widehat{\mathcal {C}}_3\cap \mathcal {C}_1\) and \(\widehat{\mathcal {C}}_3\cap \mathcal {C}_2\) each consists of a pair of infinite lines. Now, consider the horizontal circles \(\tau ^1_t, \tau ^2_t\), and \(\widehat{\tau }^3_t\) in the intersection of \(\mathbb H^2_t\) and \(\mathcal {C}_1,\mathcal {C}_2\), and \(\widehat{\mathcal {C}}_3\) respectively, where \(\mathbb H^2_t= \mathbb H^2\times \{t\}\). For any \(t\in \mathbb R\), \(\tau ^i_t\) is a circle of radius \(b_i(t)\) in \(\mathbb H^2_t\) with center (0, 0, t). Similarly, \(\widehat{\tau }^3_t\) is a circle of radius \(b_2(t)\) in \(\mathbb H^2_t\) with center \((\eta _2,0,t)\), see Fig. 4-right. Hence, it suffices to show that for any \(t\in \mathbb R\) each of the intersection \(\tau ^1_t\cap \widehat{\tau }^3_t\) and \(\tau ^2_t\cap \widehat{\tau }^3_t\) consists of two points.

\(\tau ^i_t=\mathcal {C}_i\cap \mathbb H^2_t\) is a round circle of radius \(b_i(t)\) with center O. \(\widehat{\tau }^3_t=\widehat{\mathcal {C}}_3\cap \mathbb H^2_t\) is a round circle of radius \(b_2(t)\) with center \(C=(\eta _2,0,t)\)
By construction, it is easy to see \(\tau ^2_t\cap \widehat{\tau }^3_t\) consists of two points. This is because \(\tau ^2_t\) and \(\widehat{\tau }^3_t\) have the same radius, \(b_2(t)\) and \(\eta _2+b_2(t)>b_2(t)\) and \(\eta _2-b_2(t)>-b_2(t)\). Therefore, it remains to show that \(\tau ^1_t\cap \widehat{\tau }^3_t\) consists of two points. By construction, this would be the case if \(\eta _2-b_2(t)<b_1(t)\) and \(\eta _2-b_2(t)>-b_1(t)\). The first inequality follows because \(\eta _2=\inf _{t\in \mathbb R}b_2(t)\). The second inequality follows from Lemma 2.1 because
\(\square \)
Now, let \(\widehat{\mathcal {C}}_3\cap \Omega = T^+\cup T^-\), where \(T^+\) is the infinite strip with \(\theta \in (0,\pi )\), and \(T^-\) is the infinite strip with \(\theta \in (-\pi ,0)\). Note that \(T^\pm \) is a \(\theta \)-graph over the infinite strip \(\widehat{\mathcal {P}}_0=\Omega \cap \mathcal {P}_0\) where \(\mathcal {P}_0\) is the half plane \(\{\theta =0\}\). Let \(\mathcal {V}\) be the component of \(\Omega -\widehat{C}_3\) containing \(\widehat{\mathcal {P}}_0\). Notice that the mean curvature vector \(\mathbf {H}\) of \(\partial \mathcal {V}\) points into \(\mathcal {V}\) on both \(T^+\) and \(T^-\).
Consider the lifts of \(T^+\) and \(T^-\) in \(\widetilde{\Omega }\). For \(n\in \mathbb {Z}\), let \(\widetilde{T}^+_n\) be the lift of \(T^+\) which belongs to the region \(\widetilde{\theta }\in (2n\pi , (2n+1)\pi )\). Similarly, let \(\widetilde{T}^-_n\) be the lift of \(T^-\) which belongs to the region \(\widetilde{\theta }\in ((2n-1)\pi , 2n\pi )\). Let \(\mathcal {V}_n\) be the closed region in \(\widetilde{\Omega }\) between the infinite strips \(\widetilde{T}^-_{-n}\) and \(\widetilde{T}^+_n\). Notice that for n sufficiently large, \(\mathcal {B}^\pm \subset \mathcal {V}_n\).
Next we define the compact exhaustion \(\Delta _n\) of \(\widetilde{\Omega }^*\) as follows: \(\Delta _n:=\widetilde{\mathcal {U}}_n\cap \mathcal {V}_n\). Furthermore, the absolute value of the mean curvature of \(\partial \Delta _n\) is equal to H and the mean curvature vector \(\mathbf {H}\) of \(\partial \Delta _n\) points into \(\Delta _n\) on \(\partial \Delta _n-[(\partial \Delta _n\cap \widetilde{\mathcal {C}}_1)\cup \mathcal {B}^-]\).
3.4 The sequence of H-surfaces
We next define a sequence of compact H-surfaces \(\{\Sigma _n\}_{n\in \mathbb {N}}\) where \(\Sigma _n\subset \Delta _n\). For each n sufficiently large, we define a simple closed curve \(\Gamma _n\) in \(\partial \Delta _n\), and then we solve the H-Plateau problem for \(\Gamma _n\) in \(\Delta _n\). This will provide an embedded H-surface \(\Sigma _n\) in \(\Delta _n\) with \(\partial \Sigma _n=\Gamma _n\) for each n.
The Construction of \(\Gamma _n\) in \(\partial \Delta _n:\)
First, consider the annulus \(\mathcal {A}_n=\partial \Delta _n-(\widetilde{\mathcal {C}}_1\cup \widetilde{\mathcal {C}}_2\cup \mathcal {B}^+\cup \mathcal {B}^-)\) in \(\partial \Delta _n\). Let \(\widehat{l}_n^+= \widetilde{\mathcal {C}}_1\cap \widetilde{T}^+_n\), and \(\widehat{l}_n^-= \widetilde{\mathcal {C}}_2\cap \widetilde{T}^-_{-n}\) be the pair of infinite lines in \(\widetilde{\Omega }\). Let \(l^\pm _n=\widehat{l}^\pm _n\cap \mathcal {A}_n\). Let \(\mu _n^+\) be an arc in \(\widetilde{S}^+_n\cap \mathcal {A}_n\), whose \(\widetilde{\theta }\) and \(\rho \) coordinates are strictly increasing as a function of the parameter and whose endpoints are \(l^+_n\cap \widetilde{S}^+_n\) and \(l^-_n\cap \widetilde{S}^+_n\) (Fig. 5-left). Similarly, define \(\mu _n^-\) to be a monotone arc in \(\widetilde{S}^-_n\cap \mathcal {A}_n\) whose endpoints are \(l^+_n\cap \widetilde{S}^-_n\) and \(l^-_n\cap \widetilde{S}^-_n\). Note that these arcs \(\mu ^+_n\) and \(\mu ^-_n\) are by construction disjoint from the infinite bumps \(\mathcal {B}^\pm \). Then, \(\Gamma _n=\mu ^+_n\cup l^+_n \cup \mu ^-_n\cup l^-_n\) is a simple closed curve in \(\mathcal {A}_n\subset \partial \Delta _n\) (Fig. 5-right).

In the left, \(\mu ^n_+\) is pictured in \(\widetilde{S}^+_n\). On the right, the curve \(\Gamma _n\) is described in \(\partial \Delta _n\)
Next, consider the following variational problem (H-Plateau problem): Given the simple closed curve \(\Gamma _n\) in \(\mathcal {A}_n\), let M be a smooth compact embedded surface in \(\Delta _n\) with \(\partial M=\Gamma _n\). Since \(\Delta _n\) is simply-connected, M separates \(\Delta _n\) into two regions. Let Q be the region in \(\Delta _n-\Sigma \) with \(Q\cap \widetilde{\mathcal {C}}_2\ne \emptyset \), the “upper” region. Then define the functional \(\mathcal {I}_H=\hbox {Area}(M)+2H\,\hbox {Volume}(Q)\).
By working with integral currents, it is known that there exists a smooth (except at the 4 corners of \(\Gamma _n\)), compact, embedded H-surface \(\Sigma _n\subset \Delta _n\) with \(\text {Int}(\Sigma _n)\subset \text {Int}(\Delta _n)\) and \(\partial \Sigma _n=\Gamma _n\). Note that in our setting, \(\Delta _n\) is not H-mean convex along \(\Delta _n\cap \widetilde{\mathcal {C}}_1\). However, the mean curvature vector along \(\Sigma _n\) points outside Q because of the construction of the variational problem. Therefore \(\Delta _n\cap \widetilde{\mathcal {C}}_1\) is still a good barrier for solving the H-Plateau problem. In fact, \(\Sigma _n\) can be chosen to be, and we will assume it is, a minimizer for this variational problem, i.e., \(I(\Sigma _n)\le I(M)\) for any \(M\subset \Delta _n\) with \(\partial M =\Gamma _n\); see for instance [12, Theorem 2.1] and [1, Theorem 1]. In particular, the fact that \(\text {Int}(\Sigma _n)\subset \text {Int}(\Delta _n)\) is proven in Lemma 3 of [4]. Moreover, \(\Sigma _n\) separates \(\Delta _n\) into two regions.
Similarly to Lemma 4.1 in [3], in the following lemma we show that for any such \(\Gamma _n\), the minimizer surface \(\Sigma _n\) is a \(\widetilde{\theta }\)-graph.
Lemma 3.4
Let \(E_n:=\mathcal {A}_n\cap \widetilde{T}^+_n\). The minimizer surface \(\Sigma _n\) is a \(\widetilde{\theta }\)-graph over the compact disk \(E_n\). In particular, the related Jacobi function \(J_n\) on \(\Sigma _n\) induced by the inner product of the unit normal field to \(\Sigma _n\) with the Killing field \( \partial _{\widetilde{\theta }}\) is positive in the interior of \(\Sigma _n\).
Proof
The proof is almost identical to the proof of Lemma 4.1 in [3], and for the sake of completeness, we give it here. Let \(T_\alpha \) be the isometry of \(\widetilde{\Omega }\) which is a translation by \(\alpha \) in the \(\widetilde{\theta }\) direction, i.e.,
Let \(T_\alpha (\Sigma _n)=\Sigma ^\alpha _n\) and \(T_\alpha (\Gamma _n)=\Gamma ^\alpha _n\). We claim that \(\Sigma ^\alpha _n\cap \Sigma _n=\emptyset \) for any \(\alpha \in {\mathbb {R}}\setminus \{0\}\) which implies that \(\Sigma _n\) is a \(\widetilde{\theta }\)-graph; we will use that \(\Gamma ^\alpha _n \) is disjoint from \(\Sigma _n\) for any \(\alpha \in {\mathbb {R}}\setminus \{0\}\).
Arguing by contradiction, suppose that \(\Sigma ^\alpha _n\cap \Sigma _n\ne \emptyset \) for a certain \(\alpha \ne 0\). By compactness of \(\Sigma _n\), there exists a largest positive number \(\alpha '\) such that \(\Sigma ^{\alpha '}_n\cap \Sigma _n\ne \emptyset \). Let \(p\in \Sigma ^{\alpha '}_n\cap \Sigma _n\). Since \(\partial \Sigma ^{\alpha '}_n \cap \partial \Sigma _n =\emptyset \) and the interior of \(\Sigma _n\), respectively \(\Sigma ^{\alpha '}_n\), lie in the interior of \(\Delta _n\), respectively \(T_{\alpha '}(\Delta _n)\), then \(p\in \mathrm{Int}(\Sigma ^{\alpha '}_n) \cap \mathrm{Int}(\Sigma _n)\). Since the surfaces \(\mathrm{Int}(\Sigma ^{\alpha '}_n)\), \(\mathrm{Int}(\Sigma _n)\) lie on one side of each other and intersect tangentially at the point p with the same mean curvature vector, then we obtain a contradiction to the mean curvature comparison principle for constant mean curvature surfaces, see Proposition 2.2. This proves that \(\Sigma _n\) is graphical over its \(\widetilde{\theta }\)-projection to \(E_n\).
Since by construction every integral curve, \((\overline{\rho },s,\overline{t})\) with \(\overline{\rho }, \overline{t}\) fixed and \((\overline{\rho },s_0, \overline{t})\in E_n\) for a certain \(s_0\), of the Killing field \(\partial _{\widetilde{\theta }}\) has non-zero intersection number with any compact surface bounded by \(\Gamma _n\), we conclude that every such integral curve intersects both the disk \(E_n\) and \(\Sigma _n\) in single points. This means that \(\Sigma _n\) is a \(\widetilde{\theta }\)-graph over \(E_n\) and thus the related Jacobi function \(J_n\) on \(\Sigma _n\) induced by the inner product of the unit normal field to \(\Sigma _n\) with the Killing field \(\partial _{\widetilde{\theta }}\) is non-negative in the interior of \(\Sigma _n\). Since \(J_n\) is a non-negative Jacobi function, then either \(J_n\equiv 0\) or \(J_n>0\). Since by construction \(J_n\) is positive somewhere in the interior, then \(J_n\) is positive everywhere in the interior. This finishes the proof of the lemma. \(\square \)
4 The proof of Theorem 1.1
With \(\Gamma _n\) as previously described, we have so far constructed a sequence of compact stable H-disks \(\Sigma _n\) with \(\partial \Sigma _n = \Gamma _n \subset \partial \Delta _n\). Let \(J_n\) be the related non-negative Jacobi function described in Lemma 3.4.
By the curvature estimates for stable H-surfaces given in [11], the norms of the second fundamental forms of the \(\Sigma _n\) are uniformly bounded from above at points which are at intrinsic distance at least one from their boundaries. Since the boundaries of the \(\Sigma _{n}\) leave every compact subset of \(\widetilde{\Omega }^*\), for each compact set of \(\widetilde{\Omega }^*\), the norms of the second fundamental forms of the \(\Sigma _n\) are uniformly bounded for values n sufficiently large and such a bound does not depend on the chosen compact set. Standard compactness arguments give that, after passing to a subsequence, \(\Sigma _n\) converges to a (weak) H-lamination \(\widetilde{\mathcal {L}}\) of \(\widetilde{\Omega }^*\) and the leaves of \(\widetilde{\mathcal {L}}\) are complete and have uniformly bounded norm of their second fundamental forms, see for instance [5].
Let \(\beta \) be a compact embedded arc contained in \(\widetilde{\Omega }^*\) such that its end points \(p_+\) and \(p_-\) are contained respectively in \(\mathcal {B}^+\) and \(\mathcal {B}^-\), and such that these are the only points in the intersection \([\mathcal {B}^+\cup \mathcal {B}^-]\cap \beta \). Then, for n-sufficiently large, the linking number between \(\Gamma _n\) and \(\beta \) is one, which gives that, for n sufficiently large, \(\Sigma _n\) intersects \(\beta \) in an odd number of points. In particular \(\Sigma _n\cap \beta \ne \emptyset \) which implies that the lamination \(\widetilde{\mathcal {L}}\) is not empty.
Remark 4.1
By Remark 3.2, a leaf of \(\widetilde{\mathcal {L}}\) that is invariant with respect to \(\widetilde{\theta }\)-translations cannot be contained in \(\widetilde{\Omega }^*\). Therefore none of the leaves of \(\widetilde{\mathcal {L}}\) are invariant with respect to \(\widetilde{\theta }\)-translations.
Let \(\widetilde{L}\) be a leaf of \(\widetilde{\mathcal {L}}\) and let \(J_{\widetilde{L}}\) be the Jacobi function induced by taking the inner product of \(\partial _{\widetilde{\theta }}\) with the unit normal of \(\widetilde{L}\). Then, by the nature of the convergence, \(J_{\widetilde{L}}\ge 0\) and therefore since it is a Jacobi field, it is either positive or identically zero. In the latter case, \(\widetilde{\mathcal {L}}\) would be invariant with respect to \(\widetilde{\theta }\)-translations, contradicting Remark 4.1. Thus, by Remark 4.1, we have that \(J_{\widetilde{L}}\) is positive and therefore \(\widetilde{L}\) is a Killing graph with respect to \(\partial _{\widetilde{\theta }}\).
Claim 4.2
Each leaf \(\widetilde{L}\) of \(\widetilde{\mathcal {L}}\) is properly embedded in \(\widetilde{\Omega }^*\).
Proof
Arguing by contradiction, suppose there exists a leaf \(\widetilde{L}\) of \(\widetilde{\mathcal {L}}\) that is NOT proper in \(\widetilde{\Omega }^*\). Then, since the leaf \(\widetilde{L}\) has uniformly bounded norm of its second fundamental form, the closure of \(\widetilde{L}\) in \(\widetilde{\Omega }^*\) is a lamination of \(\widetilde{\Omega }^*\) with a limit leaf \(\Lambda \), namely \(\Lambda \subset \overline{\widetilde{L}}-\widetilde{L}\). Let \(J_{\Lambda }\) be the Jacobi function induced by taking the inner product of \(\partial _{\widetilde{\theta }}\) with the unit normal of \(\Lambda \).
Just like in the previous discussion, by the nature of the convergence, \(J_{\Lambda }\ge 0\) and therefore, since it is a Jacobi field, it is either positive or identically zero. In the latter case, \(\Lambda \) would be invariant with respect to \(\widetilde{\theta }\)-translations and thus, by Remark 4.1, \(\Lambda \) cannot be contained in \(\widetilde{\Omega }^*\). However, since \(\Lambda \) is contained in the closure of \(\widetilde{ L}\), this would imply that \(\widetilde{L}\) is not contained in \(\widetilde{\Omega }^*\), giving a contradiction. Thus, \(J_{\Lambda }\) must be positive and therefore, \(\Lambda \) is a Killing graph with respect to \(\partial _{\widetilde{\theta }}\). However, this implies that \(\widetilde{L}\) cannot be a Killing graph with respect to \(\partial _{\widetilde{\theta }}\). This follows because if we fix a point p in \(\Lambda \) and let \(U_p\subset \Lambda \) be neighborhood of such point, then by the nature of the convergence, \(U_p\) is the limit of a sequence of disjoint domains \(U_{p_n}\) in \(\widetilde{L}\) where \(p_n\in \widetilde{L}\) is a sequence of points converging to p and \(U_{p_n}\subset \widetilde{L}\) is a neighborhood of \(p_n\). While each domain \(U_{p_n}\) is a Killing graph with respect to \(\partial _{\widetilde{\theta }}\), the convergence to \(U_p\) implies that their union is not. This gives a contradiction and proves that \(\Lambda \) cannot be a Killing graph with respect to \(\partial _{\widetilde{\theta }}\). Since we have already shown that \(\Lambda \) must be a Killing graph with respect to \(\partial _{\widetilde{\theta }}\), this gives a contradiction. Thus \(\Lambda \) cannot exist and each leaf \(\widetilde{L}\) of \(\widetilde{\mathcal {L}}\) is properly embedded in \(\widetilde{\Omega }^*\). \(\square \)
Arguing similarly to the proof of the previous claim, it follows that a small perturbation of \(\beta \), which we still denote by \(\beta \) intersects \(\Sigma _n\) and \(\widetilde{\mathcal {L}}\) transversally in a finite number of points. Note that \(\widetilde{\mathcal {L}}\) is obtained as the limit of \(\Sigma _n\). Indeed, since \(\Sigma _n\) separates \(\mathcal {B}^+\) and \(\mathcal {B}^-\) in \(\widetilde{\Omega }^*\), the algebraic intersection number of \(\beta \) and \(\Sigma _n\) must be one, which implies that \(\beta \) intersects \(\Sigma _n\) in an odd number of points. Then \(\beta \) intersects \(\widetilde{\mathcal {L}}\) in an odd number of points and the claim below follows.
Claim 4.3
The curve \(\beta \) intersects \(\widetilde{\mathcal {L}}\) in an odd number of points.
In particular \(\beta \) intersects only a finite collection of leaves in \(\widetilde{\mathcal {L}}\) and we let \(\mathcal {F}\) denote the non-empty finite collection of leaves that intersect \(\beta \).
Definition 4.1
Let \((\rho _1, \widetilde{\theta }_0, t_0)\) be a fixed point in \(\widetilde{\mathcal {C}}_1\) and let \(\rho _2(\widetilde{\theta }_0, t_0)>\rho _1\) such that \((\rho _2(\widetilde{\theta }_0, t_0), \widetilde{\theta }_0, t_0)\) is in \(\widetilde{\mathcal {C}}_2\). Then we call the arc in \(\widetilde{\Omega }\) given by
the vertical line segment based at \((\rho _1, \widetilde{\theta }_0, t_0)\).
Claim 4.4
There exists at least one leaf \(\widetilde{L}_{\beta }\) in \(\mathcal {F}\) that intersects \(\beta \) in an odd number of points and the leaf \(\widetilde{L}_{\beta }\) must intersect each vertical line segment at least once.
Proof
The existence of \(\widetilde{L}_{\beta }\) follows because otherwise, if all the leaves in \(\mathcal {F}\) intersected \(\beta \) in an even number of points, then the number of points in the intersection \(\beta \cap \mathcal {F}\) would be even. Given \(\widetilde{L}_{\beta }\) a leaf in \(\mathcal {F}\) that intersects \(\beta \) in an odd number of points, suppose there exists a vertical line segment which does not intersect \(\widetilde{L}_{\beta }\). Then since by Claim 4.2 \(\widetilde{L}_{\beta }\) is properly embedded, using elementary separation arguments would give that the number of points of intersection in \(\beta \cap \widetilde{L}_{\beta }\) must be zero mod 2, that is even, contradicting the previous statement. \(\square \)
Let \(\Pi \) be the covering map defined in equation (2) and let \(\mathcal {P}_H:=\Pi (\widetilde{L}_{\beta })\). The previous discussion and the fact that \(\Pi \) is a local diffeomorphism, implies that \(\mathcal {P}_H\) is a stable complete H-surface embedded in \(\Omega \). Indeed, \(\mathcal {P}_H\) is a graph over its \(\theta \)-projection to \(\mathrm{Int}(\Omega )\cap \{(\rho ,0,t)\mid \rho >0, \, t\in \mathbb {R}\}\), which we denote by \(\theta (\mathcal {P}_H)\). Abusing the notation, let \(J_{\mathcal {P}_H}\) be the Jacobi function induced by taking the inner product of \(\partial _{\theta }\) with the unit normal of \(\mathcal {P}_H\), then \(J_{\mathcal {P}_H}\) is positive. Finally, since the norm of the second fundamental form of \(\mathcal {P}_H\) is uniformly bounded, standard compactness arguments imply that its closure \(\overline{\mathcal {P}}_H\) is an H-lamination \(\mathcal {L}\) of \(\Omega \), see for instance [5].
Claim 4.5
The closure of \(\mathcal {P}_H\) is an H-lamination of \(\Omega \) consisting of itself and two H-catenoids \(L_1, L_2\subset \Omega \) that form the limit set of \(\mathcal {P}_H\).
Remark 4.6
Note that these two H-catenoids are not necessarily the ones which determine \(\partial \Omega \).
Proof
Given \((\rho _1, \widetilde{\theta }_0, t_0)\in {\widetilde{\mathcal {C}}}_1\), let \(\widetilde{\gamma }\) be the fixed vertical line segment in \(\widetilde{\Omega }\) based at \((\rho _1, \widetilde{\theta }_0, t_0)\), let \(\widetilde{p}_0\) be a point in the intersection \(\widetilde{L}_\beta \cap \widetilde{\gamma }\) (recall that by Claim 4.4 such intersection is not empty) and let \(p_0=\Pi (\widetilde{p}_0)\in \Pi (\widetilde{\gamma })\cap \mathcal {P}_H\). Then, by Claim 4.4, for any \(i\in \mathbb N\), the vertical line segment \(T_{2\pi i}(\widetilde{\gamma })\) intersects \(\widetilde{L}_\beta \) in at least a point \(\widetilde{p}_i\), and \(\widetilde{p}_{i+1}\) is above \(\widetilde{p}_i\), where T is the translation defined in equation (4). Namely, \(\widetilde{p}_0=(r_0, \widetilde{\theta }_0, t_0)\), \(\widetilde{p}_i=(r_i, \widetilde{\theta }_0+2\pi i, t_0)\) and \(r_i<r_{i+1}<\rho _2(\widetilde{\theta }_0, t_0)\). The point \(\widetilde{p_i}\in \widetilde{L}_\beta \) corresponds to the point \(p_i= \Pi (\widetilde{p}_i)=(r_i, \widetilde{\theta }_0\, \text {mod}\, 2\pi , t_0)\in \mathcal {P}_H\). Let \(r(2):=\lim _{i\rightarrow \infty }r_i\) then \(r(2)\le \rho _2(\widetilde{\theta }_0,t_0)\) and note that since \(\lim _{i\rightarrow \infty }(r_{i+1}-r_i)=0\), then the value of the Jacobi function \(J_{\mathcal {P}_H}\) at \( p_i\) must be going to zero as i goes to infinity. Clearly, the point \(Q:=(r(2), \widetilde{\theta }_0 \, \text {mod}\, 2\pi , t_0)\in \Omega \) is in the closure of \(\mathcal {P}_H\), that is \(\mathcal {L}\). Let \(L_2\) be the leaf of \(\mathcal {L}\) containing Q. By the previous discussion \(J_{L_2}(Q)=0\). Since by the nature of the convergence, either \(J_{L_2}\) is positive or \(L_2\) is rotational, then \(L_2\) is rotational, namely an H-catenoid.
Arguing similarly but considering the intersection of \(\widetilde{L}_\beta \) with the vertical line segments \(T_{-2\pi i}(\widetilde{\gamma })\), \(i\in \mathbb N\), one obtains another H-catenoid \(L_1\), different from \(L_2\), in the lamination \(\mathcal {L}\). This shows that the closure of \(\mathcal {P}_H\) contains the two H-catenoids \(L_1\) and \(L_2\).
Let \(\Omega _g\) be the rotationally invariant, connected region of \(\Omega -[L_1\cup L_2]\) whose boundary contains \(L_1\cup L_2\). Note that since \(\mathcal {P}_H\) is connected and \(L_1\cup L_2\) is contained in its closure, then \(\mathcal {P}_H\subset \Omega _g\). It remains to show that \(\mathcal {L}=\mathcal {P}_H\cup L_1\cup L_2\), i.e. \(\overline{\mathcal {P}}_H-\mathcal {P}_H=L_1\cup L_2\). If \(\overline{\mathcal {P}}_H-\mathcal {P}_H\ne L_1\cup L_2\) then there would be another leaf \(L_3\in \mathcal {L}\cap \Omega _g\) and by previous argument, \(L_3\) would be an H-catenoid. Thus \(L_3\) would separate \(\Omega _g\) into two regions, contradicting that fact that \(\mathcal {P}_H\) is connected and \(L_1\cup L_2\) are contained in its closure. This finishes the proof of the claim. \(\square \)
Note that by the previous claim, \(\mathcal {P}_H\) is properly embedded in \(\Omega _g\).
Claim 4.7
The H-surface \(\mathcal {P}_H\) is simply-connected and every integral curve of \(\partial _\theta \) that lies in \(\Omega _g\) intersects \(\mathcal {P}_H\) in exactly one point.
Proof
Let \(D_g:=\mathrm{Int}(\Omega _g)\cap \{(\rho ,0,t)\mid \rho >0, \, t\in \mathbb {R}\}\), then \(\mathcal {P}_H\) is a graph over its \(\theta \)-projection to \(D_g\), that is \(\theta (\mathcal {P}_H)\). Since \(\theta :\Omega _g\rightarrow D_g\) is a proper submersion and \(\mathcal {P}_H\) is properly embedded in \(\Omega _g\), then \(\theta (\mathcal {P}_H)=D_g\), which implies that every integral curve of \(\partial _\theta \) that lies in \(\Omega _g\) intersects \(\mathcal {P}_H\) in exactly one point. Moreover, since \(D_g\) is simply-connected, this gives that \(\mathcal {P}_H\) is also simply-connected. This finishes the proof of the claim. \(\square \)
From this claim, it clearly follows that \(\Omega _g\) is foliated by H-surfaces, where the leaves of this foliation are \(L_1\), \(L_2\) and the rotated images \(\mathcal {P}_H ({\theta })\) of \(\mathcal {P}_H\) around the t-axis by angles \(\theta \in [0,2\pi )\). The existence of the examples \(\Sigma _H\) in the statement of Theorem 1.1 can easily be proven by using \(\mathcal {P}_H\). We set \(\Sigma _H=\mathcal {P}_H\), and \(C_i=L_i\) for \(i=1,2\). This finishes the proof of Theorem 1.1.
5 Appendix: Disjoint H-catenoids
In this section, we will show the existence of disjoint H-catenoids in \({\mathbb H}^2\times {\mathbb R}\). In particular, we will prove Lemma 2.1. Given \(H\in (0,\frac{1}{2})\) and \(d\in [-2H,\infty )\), recall that \(\eta _d=\cosh ^{-1}(\frac{2dH+\sqrt{1-4H^2+d^2}}{1-4H^2})\) and that \(\lambda _d:[\eta _d,\infty )\rightarrow [0,\infty )\) is the function defined as follows.
Recall that \(\lambda _d(\rho )\) is a monotone increasing function with \(\lim _{\rho \rightarrow \infty }\lambda _d(\rho )= \infty \) and that \(\lambda '_d(\eta _d)=\infty \) when \(d\in (-2H,\infty )\). The H-catenoid \(\mathcal {C}^H_d\), \( d\in (-2H,\infty )\), is obtained by rotating a generating curve \(\widehat{\lambda }_d(\rho )\) about the t-axis. The generating curve \(\widehat{\lambda }_d \) is obtained by doubling the curve \((\rho , 0, \lambda _d(\rho ))\), \(\rho \in [\eta _d,\infty )\), with its reflection \((\rho , 0, -\lambda _d(\rho ))\), \(\rho \in [\eta _d,\infty )\).
Finally, recall that \(b_{d}(t):=\lambda _d^{-1}(t)\) for \(t\ge 0\), hence \(b_d(0)=\eta _{d}\), and that abusing the notation \(b_d(t):=b_d(-t)\) for \(t\le 0\).
Lemma 2.1 (Disjoint H-catenoids) Given \(d_1>2\) there exist \(d_0>d_1\) and \(\delta _0>0\) such that for any \(d_2\in [d_0,\infty )\) and \(t>0\) then
In particular, the corresponding H-catenoids are disjoint, i.e., \(\mathcal {C}^H_{d_1}\cap \mathcal {C}^H_{d_2}=\emptyset \).
Moreover, \(b_{d_2}(t)-b_{d_1}(t)\) is decreasing for \(t>0\) and increasing for \(t<0\). In particular,
Proof
We begin by introducing the following notations that will be used for the computations in the proof of this lemma,
Recall that \(c^2-s^2=1\) and \(c-s=e^{-r}\). Using these notations,
can be rewritten as
where
First, by using a series of substitutions, we will get an explicit description of \(f_d(\rho )\). Then, we will show that for \(d>2\), \(J_d(\rho )\) is bounded independently of \(\rho \) and d.
Claim 4.8
Remark 4.9
After finding \(f_d(\rho )\), we used Wolfram Alpha to compute the derivative of \(f_d(\rho )\) and verify our claim. For the sake of completeness, we give a proof.
Proof of Claim 4.8
The proof is a computation with requires several integrations by substitution. Consider
By using the fact that \(s^2=c^2-1\) and applying the substitution \(\{u=c,du=\frac{dc}{dr}dr=sdr\}\) we obtain that
Note that
Therefore, by applying a second substitution, \(\{w=u-\frac{2dH}{(1-4H^2)}, dw=du\}\), and letting \(a^2=(\frac{d^2+1-4H^2}{(1-4H^2)^2})\) we get that
By using the fact that \(\sec ^2x-1=\tan ^2x\) and applying a third substitution, \(\{w=a\sec t, dw=a\sec t\tan t dt\}\), we obtain that
Therefore
Since \(w=u-\frac{2dH}{(1-4H^2)}\) then
Finally, since \(u=\cosh r\)
Recall that \(\eta _d=\cosh ^{-1} (\frac{2dH+\sqrt{1-4H^2+d^2}}{1-4H^2})\) and thus
This implies that
\(\square \)
By Claim 4.8 we have that
where \(\lim _{\rho \rightarrow \infty }g_d(\rho )=0\).
Recall that \(\lambda _d(\rho )= f_d(\rho )+J_d(\rho )\) where
Claim 4.10
Proof of Claim 4.10
Let
be the roots of \(c^2-1 - ( d+2Hc)^2\), i.e.
Note that \(\alpha =\cosh {\eta _d}\) and that as \(H\in (0,\frac{1}{2})\), \(\beta<0<\alpha \). Furthermore, \(2He^{-r}<2H<1<d\). Thus we have,
where the last inequality holds because for \(r>\eta _d\), \(\cosh {r}>\alpha \) and thus \(\sqrt{\alpha -\beta }< \sqrt{c-\alpha }\). Notice that \(\alpha -\beta = \frac{2\sqrt{1-4H^2+d^2}}{1-4H^2}>\frac{2d}{1-4H^2}\). Therefore
and
Applying the substitution \(\{ u=c-\alpha , du=sdr=\sqrt{(u+\alpha )^2-1}dr\}\), we obtain that
Let \(\omega =\alpha -1\). Note that since \(d\ge 1\) then \(\alpha >1\) and we have that \((u+\alpha )^2-1> (u+\omega )^2\) as \(u>0\). This gives that
Applying the substitution \(\{ v=\sqrt{u}, dv=\dfrac{du}{2\sqrt{u}}\}\) we get
and thus
Note that
Since \(d>2\), we have \(2\omega >\dfrac{d}{1-2H}\) and \(\dfrac{d}{\omega }<2(1-2H)\). Then \( \sqrt{\dfrac{2d}{\omega }}<2\sqrt{1-2H}. \)
Finally, this gives that
independently on \(d>2\) and \(\rho >\eta _d\). This finishes the proof of the claim. \(\square \)
Using Claims 4.8 and 4.10, we can now prove the next claim.
Claim 4.11
Given \(d_2>d_1>2\) there exists \(T\in \mathbb R\) such for any \(t>T\), we have that
Proof of Claim 4.11
Recall that \(\lambda _d(\rho )=f_d(\rho )+J_d(\rho )\) and that by Claims 4.8 and 4.10 we have that
where \(\lim _{\rho \rightarrow \infty }g_d(\rho )=0\), and that
Let \(\rho _i(t):=\lambda _{d_i}^{-1}(t)\), \(i=1,2\). Using this notation, since \(t=\lambda _1(\rho _1(t))=\lambda _2(\rho _2(t))\) we obtain that
Recall that \(\lim _{t\rightarrow \infty }\rho _i(t)=\infty \), \(i=1,2\), therefore given \(\varepsilon >0\) there exists \(T_\varepsilon \in \mathbb R\) such that for any \(t>T_\varepsilon \), \(|g_{d_i}(\rho _i(t))|\le \varepsilon \). Taking
for \(t>T_\varepsilon \) we get that
Notice that \(J_{d_1}(\rho _1(t))>0\) and that Claim 4.10 gives that
Therefore
This finishes the proof of the claim. \(\square \)
We can now use Claim 4.11 to finish the proof of the lemma. Given \(d_1>2\) fix \(d_0>d_1\) such that
Then, by Claim 4.11, given \(d_2\ge d_0\) there exists \(T>0\) such that \(\lambda _{d_2}^{-1}(t)-\lambda _{d_1}^{-1}(t)>1\) for any \(t>T\). Notice that since for any \(\rho \in (\eta _2,\infty )\), \(\lambda '_{d_2}(\rho )>\lambda '_{d_1}(\rho )\), then there exists at most one \(t_0>0\) such that \(\lambda _{d_2}^{-1}(t_0)-\lambda _{d_1}^{-1}(t_0)=0\). Therefore, since there exists \(T>0\) such that \(\lambda _{d_2}^{-1}(t)-\lambda _{d_1}^{-1}(t)>1\) for any \(t>T\) and \(\lambda _{d_2}^{-1}(0)-\lambda _{d_1}^{-1}(0)=\eta _{d_2}-\eta _{d_1}>0\), this implies that there exists a constant \(\delta (d_2)>0\) such that for any \(t>0\),
A priori it could happen that \(\lim _{d_2\rightarrow \infty }\delta (d_2)=0\). The fact that \(\lim _{d_2\rightarrow \infty }\delta (d_2)>0\) follows easy by noticing that by applying Claim 4.11 and using the same arguments as in the previous paragraph there exists \(d_3> d_0\) such that for any \(d\ge d_3\) and \(t>0\),
Therefore, for any \(d\ge d_3\) and \(t>0\),
which implies that
Setting \(\delta _0=\inf _{d\in [d_0,\infty )}\delta (d_2)>0\) gives that
By definition of \(b_d(t)\) then
It remains to prove that \(b_2(t)-b_1(t)\) is decreasing for \(t>0\) and increasing for \(t<0\). By definition of \(b_d(t)\), it suffices to show that \(b_2(t)-b_1(t)\) is decreasing for \(t>0\). We are going to show \(\frac{d}{dt}(b_2(t)-b_1(t))<0\) when \(t>0\).
By definition of \(b_i\), for \(t>0\) we have that \(\lambda _i(b_i(t))=t\) and thus \(b_i'(t)=\frac{1}{\lambda _i'(b_i(t))}\). By definition of \(\lambda _d(t)\) for \(t>0\) the following holds,
The first inequality is due to the convexity of the function \(\lambda _1(t)\) and the second inequality is due to the fact that \(\lambda _1'(\rho )<\lambda _2'(\rho )\) for any \(\rho >\eta _2\). This proves that \(\frac{d}{dt}(b_2(t)-b_1(t))=b_2'(t)-b_1'(t)<0\) for \(t>0\) and finishes the proof of the claim.
\(\square \)
Note that if d is sufficiently close to \(-2H\) then \(\mathcal {C}^H_d\) must be unstable. This follows because as d approaches \(-2H\), the norm of the second fundamental form of \(\mathcal {C}^H_d\) becomes arbitrarily large at points that approach the “origin” of \({\mathbb H}^2\times {\mathbb R}\) and a simple rescaling argument gives that a sequence of subdomains of \(\mathcal {C}^H_d\) converge to a catenoid, which is an unstable minimal surface. This observation, together with our previous lemma suggests the following conjecture.
Conjecture: Given \(H\in (0,\frac{1}{2})\) there exists \(d_H>-2H\) such that the following holds. For any \(d>d'>d_H\), \(\mathcal {C}^H_{d}\cap \mathcal {C}^H_{d'}=\emptyset \), and the family \(\{\mathcal {C}^H_d \mid d\in [d_H,\infty )\}\) gives a foliation of the closure of the non-simply-connected component of \({\mathbb H}^2\times {\mathbb R}-\mathcal {C}^H_{d_H}\). The H-catenoid \(\mathcal {C}^H_d\) is unstable if \(d\in (-2H, d_H)\) and stable if \(d\in (d_H,\infty )\). The H-catenoid \(\mathcal {C}^H_{d_H}\) is a stable-unstable catenoid.
References
Alencar, H., Rosenberg, H.: Some remarks on the existence of hypersurfaces of constant mean curvature with a given boundary, or asymptotic boundary in hyperbolic space. Bull. Sci. Math. 121(1), 61–69 (1997)
Colding, T.H., Minicozzi II, W.P.: The Calabi–Yau conjectures for embedded surfaces. Ann. Math. 167, 211–243 (2008)
Coskunuzer, B., Meeks III, W.H., Tinaglia, G.: Non-properly embedded H-planes in \(\mathbb{H}^{3}\). J. Differ. 105(3), 405–425 (2017). http://arxiv.org/pdf/1503.04641.pdf
Gulliver, R.: The Plateau problem for surfaces of prescribed mean curvature in a Riemannian manifold. J. Differ. Geom. 8, 317–330 (1973)
Meeks III, W.H., Rosenberg, H.: The minimal lamination closure theorem. Duke Math. J. 133(3), 467–497 (2006)
Meeks III, W.H., Tinaglia, G.: Embedded Calabi–Yau problem in hyperbolic \(3\)-manifolds. Work in progress
Meeks III, W.H., Tinaglia, G.: The geometry of constant mean curvature surfaces in \(\mathbb{R}^3\). Preprint available at http://arxiv.org/pdf/1609.08032v1.pdf
Nelli, B., Sa Earp, R., Santos, W., Toubiana, E., Toubiana, E.: Uniqueness of \(H\)-surfaces in \({\mathbb{H}}^2\times {\mathbb{R}}\), \(|{H}|\le 1/2\), with boundary one or two parallel horizontal circles. Ann. Glob. Anal. Geom. 33(4), 307–321 (2008)
Nelli, B., Rosenberg, H.: Global properties of constant mean curvature surfaces in \({\mathbb{H}}^{2}\times {\mathbb{R}}\). Pac. J. Math. 226(1), 137–152 (2006)
Rodríguez, M.M., Tinaglia, G.: Non-proper complete minimal surfaces embedded in \(\mathbb{H}^2\times \mathbb{R}\). Int. Math. Res. Not. 2015(12), 2015. http://arxiv.org/pdf/1211.5692
Rosenberg, H., Souam, R., Toubiana, E.: General curvature estimates for stable \(H\)-surfaces in \(3\)-manifolds and applications. J. Differ. Geom. 84(3), 623–648 (2010)
Tonegawa, Y.: Existence and regularity of constant mean curvature hypersurfaces in hyperbolic space. Math. Z. 221, 591–615 (1996)
Author information
Authors and Affiliations
Corresponding author
Additional information
The first author is partially supported by BAGEP award of the Science Academy, and a Royal Society Newton Mobility Grant.
The second author was supported in part by NSF Grant DMS - 1309236. Any opinions, findings, and conclusions or recommendations expressed in this publication are those of the authors and do not necessarily reflect the views of the NSF.
The third author was partially supported by EPSRC Grant No. EP/M024512/1, and a Royal Society Newton Mobility Grant.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Coskunuzer, B., Meeks III, W.H. & Tinaglia, G. Non-properly embedded H-planes in \({\mathbb H}^2\times {\mathbb R}\) . Math. Ann. 370, 1491–1512 (2018). https://doi.org/10.1007/s00208-017-1550-2
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-017-1550-2