
Abstract.
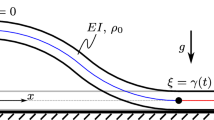
Based on the Cosserat theory describing planar deformations of shearable nonlinearly elastic rods we study the regularity of equilibrium states for problems where the deformations are restricted by rigid obstacles. We start with the discussion of general conditions modeling frictionless contact. In particular we motivate a contact condition that, roughly speaking, requires the contact forces to be directed normally, in a generalized sense, both to the obstacle and to the deformed shape of the rod. We show that there is a jump in the strains in the case of a concentrated contact force, i.e., the deformed shape of the rod has a corner. Then we assume some smoothness for the boundary of the obstacle and derive corresponding regularity for the contact forces. Finally we compare the results with the case of unshearable rods and obtain interesting qualitative differences.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
(Accepted January 21, 1998)
Rights and permissions
About this article
Cite this article
Schuricht, F. Regularity for Shearable Nonlinearly Elastic Rods in Obstacle Problems. Arch Rational Mech Anal 145, 23–49 (1998). https://doi.org/10.1007/s002050050123
Issue Date:
DOI: https://doi.org/10.1007/s002050050123