
Abstract
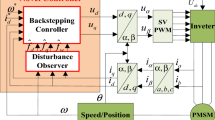
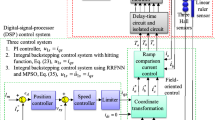
Due to nonlinear friction and uncertainty effects of linear permanent magnet synchronous motor (LPMSM), the existing linear controllers cannot achieve good control performance. In order to increase the robustness of system under some uncertainties disturbances, the proposed adaptive amended Elman neural network backstepping (AAENNB) control system with error compensation controller is adopted for controlling the LPMSM drive system. Firstly, the field-oriented control (FOC) is applied to formulate the dynamic equation of the LPMSM drive system. Secondly, a backstepping approach is proposed for controlling the motion of LPMSM drive system. The proposed backstepping control system and the mover position of the LPMSM drive system possess good transient control performance under the uncertainties action for the tracking of periodic references. Because of the LPMSM with nonlinear and time-varying dynamic characteristics, an adaptive amended Elman neural network uncertainty observer (AAENNUO) with the adaptive law is proposed to estimate the required lumped uncertainty. Moreover, the error compensation controller with the error estimation law is proposed to compensate the minimum reconstructed error according to Lyapunov stability theorem. Furthermore, to improve convergent speed and to obtain better learning performance, the varied learning rate of the weight in the AENN is regulated by use of the corrected particle swarm optimization (CPSO) algorithm with segment regulation mechanics, that is, the innovativeness for using the CPSO algorithm. At last, the usefulness of the proposed control system is confirmed by experimental results.














Similar content being viewed by others

References
Boldea I, Nasar SA (1997) Linear electric actuators and generators. Cambridge University Press, London
Egami T, Tsuchiya T (1995) Disturbance suppression control with preview action of linear DC brushless motor. IEEE Trans Ind Electron 42(5):494–500
Sanada M, Morimoto S, Takeda Y (1997) Interior permanent magnet linear synchronous motor for high-performance drives. IEEE Trans Ind Appl 33(5):966–972
Sun X, Dia K, Yang Z, Lei G, Guo Y, Zhu J (2019) Direct torque control based on a fast modeling method for a segmented-rotor switched reluctance motor in HEV application. IEEE J Emerg Sel Top Power Electron. https://doi.org/10.1109/JESTPE.2019.2950085
Sun X, Cao J, Lei G, Guo Y, Zhu J (2019) Speed sensorless control for permanent magnet synchronous motors based on finite position set. IEEE Trans Ind Electron. https://doi.org/10.1109/TIE.2019.2947875
Kanellakopoulos I, Kokotovic PV, Morse AS (1991) Systematic design of adaptive controller for feedback linearizable system. IEEE Trans Autom Control 36(11):1241–1253
Bartolini G, Ferrara A, Giacomini L, Usai E (2000) Peoperties of a combined adaptive/second-order sliding mode control algorithm for some classes of uncertain nonlinear systems. IEEE Trans Autom Control 45(7):1334–1341
Campos PJ, Coria LN, Trujillo L (2018) Nonlinear speed sensorless control of a surface-mounted PMSM based on a Thau observer. Electr Eng 100(1):177–193
Harrouz A, Becheri H, Colak I, Kayisli K (2018) Backstepping control of a separately excited DC motor. Electr Eng 100(3):1393–1403
Lin CH, Chen AC (2007) Adaptive backstepping control for SynRel motor drive using FNN uncertainty observer. In: IEEE industrial electronics conference, November 5–8, 2007, pp 433–438
Elman JL (1990) Finding structure in time. Cognit Sci 2(14):179–211
Khan MYA, Koo JY (2017) Neural network based diagnosis of partial discharge defects patterns at XLPE cable under DC stress. Electr Eng 99(1):119–132
Aslan Y, Yaqan YE (2017) Artificial neural-network-based fault location for power distribution lines using the frequency spectra of fault data. Electr Eng 99(1):301–311
Kalu OO, Madueme TC (2018) Application of artificial neural network (ANN) to enhance power systems protection: a case of the Nigerian 330 kV transmission line. Electr Eng 100(3):1467–1479
Koker R (2006) Design and performance of an intelligent predictive controller for a six-degree-of-freedom robot using the Elman network. Inf Sci 176(12):1781–1799
Kalinli A, Sagiroglu S (2006) Eleman network with embedded memory for system identification. J Inf Sci Eng 22(6):1555–1568
Toqeer RS, Bayindir NS (2003) Speed estimation of an induction motor using Elman neural network. Neurocomputing 55(3–4):727–730
Sun X, Chen L, Yang Z, Zhu H (2013) Speed-sensorless vector control of a bearingless induction motor with artificial neural network inverse speed observer. IEEE/ASME Trans Mech 18(4):1357–1366
Chow TWS, Fang Y (1998) A recurrent neural-network-based real-time learning control strategy applying to nonlinear systems with unknown dynamics. IEEE Trans Ind Electr 45(1):151–161
Brdys MA, Kulawski GJ (1999) Dynamic neural controllers for induction motor. IEEE Trans Neural Netw 10(2):340–355
Li XD, Ho JKL, Chow TWS (2005) Approximation of dynamical time-variant systems by continuous-time recurrent neural networks. IEEE Trans Circuits Syst II 52(10):656–660
Yang XY, Xu DP, Han XJ, Zhou HN (2005) Predictive functional control with modified Elman neural network for reheated steam temperature. In: International conference on machine learning and cybernetics, June 20–22 2005, pp 4699–4703
Lin CH (2012) Adaptive modified Elman neural network integral backstepping control for a PMLSM drive system. Int Rev Electr Eng 7(5):5451–5461
Tamilselvi S, Baskar S, Sivakumar T, Anandapadmanaban L (2019) Evolutionary algorithm-based design optimization for right choice of transformer conductor material and stepped core. Electr Eng 101(1):259–277
Blaifi S, Moulahoum S, Colak I, Merrouche W (2018) Monitoring and enhanced dynamic modeling of battery by genetic algorithm using LabVIEW applied in photovoltaic system. Electr Eng 100(2):1021–1038
Sun X, Hu C, Lei G, Guo Y, Zhu J (2020) State feedback control for a PM hub motor based on grey wolf optimization algorithm. IEEE Trans Power Electrons 5(1):1136–1146
Kennedy J, Eberhart RC (1995) Particle swarm optimization. Proc IEEE Int Conf Neural Netw Perth WA Aust 1995(4):1942–1948
Clerc M, Kennedy J (2002) The particle swarm-explosion, stability, and convergence in a multi-dimensional complex space. IEEE Trans Evolut Comput 6(2):58–73
Lin CH (2018) Precision motion control of a linear permanent magnet synchronous machine based on linear optical-ruler sensor and Hall sensor. Sensors 18(10):e3345
Akbari R, Ziarati K (2011) A rank based particle swarm optimization algorithm with dynamic adaptation. J Comput Appl Math 235:2694–2714
Lin CH, Hwang CC (2016) Multiobjective optimization design for a six-phase copper rotor induction motor mounted with a scroll compressor. IEEE Trans Magn 52(7):9401604
Lin CH, Hwang CC (2017) Multi-objective optimization design using amended particle swarm optimization and Taguchi method for a six-phase copper rotor induction motor. Eng Optim 49(4):693–708
Slotine JJE, Li W (1991) Applied nonlinear control. Prentice-Hal, Englewood Cliffs
Astrom J, Wittenmark B (1995) Adaptive control. Addison-Wesley, New York
Lewis FL, Campos J, Selmic R (2002) Neuro-fuzzy control of industrial systems with actuator nonlinearities. SIAM Frontiers in Applied Mathematics, New Delhi
Astrom KJ, Hagglund T (1995) PID Controller: theory, design, and tuning. Instrument Society of America, Research Triangle Park, North Carolina
Hagglund T, Astrom KJ (2002) Revisiting the Ziegler-Nichols tuning rules for PI control. Asian J Control 4(4):364–380
Hagglund T, Astrom KJ (2004) Revisiting the Ziegler- Nichols tuning rules for PI control-part II: the frequency response method. Asian J Control 6(4):469–482
Acknowledgements
The author would like to acknowledge the financial support of the Ministry of Science Technology in Taiwan, R.O.C., through its Grant MOST 107-2221-E-239-021.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lin, CH. Linear permanent magnet synchronous motor drive system using AAENNB Control system with error compensation controller and CPSO. Electr Eng 102, 1311–1325 (2020). https://doi.org/10.1007/s00202-020-00953-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-020-00953-4