
Abstract
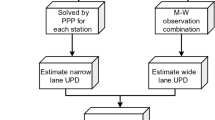
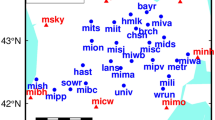
Zero-difference (ZD) ambiguity resolution (AR) reveals the potential to further improve the performance of precise point positioning (PPP). Traditionally, PPP AR is achieved by Melbourne–Wübbena and ionosphere-free combinations in which the ionosphere effect are removed. To exploit the ionosphere characteristics, PPP AR with L1 and L2 raw observable has also been developed recently. In this study, we apply this new approach in uncalibrated phase delay (UPD) generation and ZD AR and compare it with the traditional model. The raw observable processing strategy treats each ionosphere delay as an unknown parameter. In this manner, both a priori ionosphere correction model and its spatio-temporal correlation can be employed as constraints to improve the ambiguity resolution. However, theoretical analysis indicates that for the wide-lane (WL) UPD retrieved from L1/L2 ambiguities to benefit from this raw observable approach, high precision ionosphere correction of better than 0.7 total electron content unit (TECU) is essential. This conclusion is then confirmed with over 1 year data collected at about 360 stations. Firstly, both global and regional ionosphere model were generated and evaluated, the results of which demonstrated that, for large-scale ionosphere modeling, only an accuracy of 3.9 TECU can be achieved on average for the vertical delays, and this accuracy can be improved to about 0.64 TECU when dense network is involved. Based on these ionosphere products, WL/narrow-lane (NL) UPDs are then extracted with the raw observable model. The NL ambiguity reveals a better stability and consistency compared to traditional approach. Nonetheless, the WL ambiguity can be hardly improved even constrained with the high spatio-temporal resolution ionospheric corrections. By applying both these approaches in PPP-RTK, it is interesting to find that the traditional model is more efficient in AR as evidenced by the shorter time to first fix, while the three-dimensional positioning accuracy of the RAW model outperforms the combination model by about \(7.9\,\%\). This reveals that, with the current ionosphere models, there is actually no optimal strategy for the dual-frequency ZD ambiguity resolution, and the combination approach and raw approach each has merits and demerits.







Similar content being viewed by others

References
Bertiger W, Desai S, Haines B, Harvey N, Moore Angelyn W, Owen S, Weiss J (2010) Single receiver phase ambiguity resolution with GPS data. J Geod 84(5):327–337
Bisnath S, Gao Y (2008) Current state of precise point positioning and future prospects and limitations. Obs Chang Earth IAG Symp 133:615–623
Bock H, Jäggi A, Dach R, Schaer S, Beutler G (2009) GPS single-frequency orbit determination for low Earth orbiting satellites. Adv Space Res 43(5):783–791. doi:10.1016/j.asr.2008.12.003
Collins P (2008) Isolating and estimating undifferenced GPS integer ambiguities. In: Proceedings of ION national technical meeting, San Diego, pp 720–732
Feng Y, Gu S, Shi C, Rizos C (2013) A reference station-based GNSS computing mode to support unified precise point positioning and real-time kinematic services. J Geod 87(10–12):945–960. doi:10.1007/s00190-013-0659-7
Gabor MJ, Nerem RS (1999) GPS carrier phase ambiguity resolution using satellite–satellite single differences. In: Proceedings of the 12th international technical meeting of the satellite division of the institute of navigation, pp 1569–1578
Ge M, Gendt G, Rothacher M, Shi C, Liu J (2008) Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J Geod 82(7):389–399
Geng J, Bock Y (2013) Triple-frequency GPS precise point positioning with rapid ambiguity resolution. J Geod 87(5):449–460. doi:10.1007/s00190-013-0619-2
Geng J, Meng X, Dodson AH, Teferle FN (2010a) Integer ambiguity resolution in precise point positioning: method comparison. J Geod 84(9):569–581
Geng J, Teferle FN, Meng X, Dodson AH (2010b) Towards PPP-RTK: ambiguity resolution in real-time precise point positioning. Adv Space Res 47(10):1664–1673
Gu S (2013) Research on the zero-difference un-combined data processing model for multi-frequency GNSS and its applications. PhD, Wuhan University (in Chinese)
Gu S, Shi C, Lou Y, Feng Y, Ge M (2013) Generalized-positioning for mixed-frequency of mixed-GNSS and its preliminary applications. In: Proceedings on China satellite navigation conference (CSNC), pp 399–428
Keshin MO, Le AQ, van der Marel H (2006) Single and dual-frequency precise point positioning: approaches and performances. In: Proceedings of 3rd ESA workshop on satellite navigation user equipment technologies
Kouba J, Héroux P (2001) Precise point positioning using IGS orbit and clock products. GPS Solut 5(2):12–28
Laurichesse D, Mercier F, Berthias JP, Broca P, Cerri L (2009) Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navig J Inst Navig 56(2):135–149
Le AQ, Tiberius C (2007) Single-frequency precise point positioning with optimal filtering. GPS Solut 11(1):61–69. doi:10.1007/s10291-006-0033-9
Li B, Verhagen S (2014) Robustness of GNSS integer ambiguity resolution in the presence of atmospheric biases. GPS Solut 18(2):283–296. doi:10.1007/s10291-013-0329-5
Li X, Ge M, Zhang H, Wickert J (2013) A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J Geod 87(5):405–416. doi:10.1007/s00190-013-0611-x
Liu J, Ge M (2003) PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ J Nat Sci 8(2):603–609. doi:10.1007/BF02899825
Mannucci AJ, Wilson BD, Yuan DN, Ho CH, Lindqwister UJ, Runge TF (1998) A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci 33(3):565–582. doi:10.1029/97RS02707
Ors R, Hernndez-Pajares M, Juan JM, Sanz J, Garca-Fernndez M (2002) Performance of different TEC models to provide GPS ionospheric corrections. J Atmos Sol-Terr Phys 64(18):2055–2062
Rocken C, Johnson JM, Braun JJ, Kawawa H, Hatanaka Y, Imakiire T (2000) Improving GPS surveying with modeled ionospheric corrections. Geophys Res Lett 27(23):3821–3824
Schaer S (1999) Mapping and predicting the Earth’s ionosphere using the Global Positioning System. Ph.D. thesis, University of Bern, Switzerland
Schaer S, Dach R (2010) Biases in GNSS analysis. IGS Workshop, Newcastle
Schönemann E, Becker M, Springer T (2011) A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J Geod Sci 1(3):204–214. doi:10.2478/v10156-010-0023-2
Shi C, Gu S, Lou Y, Ge M (2012) An improved approach to model ionospheric delays for single-frequency precise point positioning. Adv Space Res 49(12):1698–1708. doi:10.1016/j.asr.2012.03.016
Shi C, Zhao Q, Geng J, Lou Y, Ge M, Liu J (2008) Recent development of PANDA software in GNSS data processing. In: Li D, Gong J, Wu H (eds) Proceedings of SPIE, the international society for optical engineering. SPIE, Bellingham, vol 7285, p 72851S. doi:10.1117/12.816261
Teunissen PJG (1997) On the sensitivity of the location, size and shape of the GPS ambiguity search space to certain changes in the stochastic model. J Geod 71(9):541–551. doi:10.1007/s001900050122
Teunissen PJG, Odijk D, Zhang B (2010) PPP-RTK: results of CORS network-based PPP with integer ambiguity resolution. J Aeronaut Astronaut Aviat Ser A 42(4):223–230
Wübbena G, Schmitz M, Bagge A (2005) PPP-RTK: precise point positioning using state-space representation in RTK networks. In: Proceedings of 18th international technical meeting, ION GNSS-05, pp 13–16
Yao Y, Zhang R, Song W, Shi C, Lou Y (2013) An improved approach to model regional ionosphere and accelerate convergence for precise point positioning. Adv Space Res 52(8):1406–1415. doi:10.1016/j.asr.2013.07.020
Yuan Y, Ou J (2004) A generalized trigonometric series function model for determining ionospheric delay. Prog Nat Sci 14(11):1010–1014
Zhang B, Teunissen PJG, Odijk D (2011) A novel un-differenced PPP-RTK concept. J Navig 64(S1):S180–S191
Zumberge JF, Heflin MB, Jefferson DC, Watkins MM, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017
Acknowledgments
The study was partially sponsored by the National Natural Science Foundation of China (41231174, 41374034, 41104024), and partially sponsored by the Natural Science Foundation of China (2014AA123101) and by the Fundamental Research Funds for the Central Universities (2042014kf0081). The authors thank the three anonymous reviewers for their valuable comments. Thanks also go to IGS for data provision.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Gu, S., Shi, C., Lou, Y. et al. Ionospheric effects in uncalibrated phase delay estimation and ambiguity-fixed PPP based on raw observable model. J Geod 89, 447–457 (2015). https://doi.org/10.1007/s00190-015-0789-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-015-0789-1