
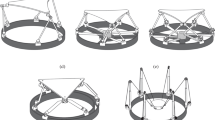
In view of the existing problems of parallel mechanisms, and in order to meet the requirements of developing a new generation of high-speed virtual axis machine tools with a large working space, a novel high-speed travelling double four-rod spatial parallel mechanism is presented. The kernel issues are studied and related solutions are given to the key problems, such as forward and inverse kinematics and dexterity calculation. Computer simulation has been carried out to verify the correctness of the theoretical analysis. As an application example, a new type of five-coordinate robotic machine tool is introduced that is made based on this parallel mechanism. Theoretical analysis and application research show that the new mechanism has the advantages of long travel, large rotating angles and high moving speed, giving it a good prospect of application.
Similar content being viewed by others


Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Zhou, K., Mao, D. & Tao, Z. Kinematic Analysis and Application Research on a High-Speed Travelling Double Four-Rod Spatial Parallel Mechanism. Int J Adv Manuf Technol 19, 873–878 (2002). https://doi.org/10.1007/s001700200099
Issue Date:
DOI: https://doi.org/10.1007/s001700200099