
Abstract
Feedrate scheduling plays a crucial role in computer numerical control (CNC) machining and has attracted considerable research attention. To improve machining accuracy and motion smoothness, this paper proposes a S-shape feedrate scheduling method with rounding error elimination. Eliminate rounding errors directly, rather than consider compensating for rounding errors. Firstly, based on the typical S-shaped acceleration and deceleration (ACC/DEC) algorithm, a novel time rounding scheme is designed by adopting different rounding methods for different sub-time periods. Secondly, this is the key to eliminating rounding errors, according to the principles of constant displacement and continuity of feedrate, the jerk expression is derived, and an series of feedrate scheduling methods is are designed for different S-shaped ACC/DEC situations. In addition, adapting the feedrate interpolation strategy to the proposed feedrate scheduling method. A bidirectional interpolation strategy with backtracking correction was proposed to improve reliability and continuity in feedrate scheduling. Finally, the good performance and applicability of the proposed method are verified by a series of simulations on non-uniform rational B-spline (NURBS) curves.






Similar content being viewed by others

References
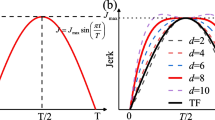
Huang J, Zhu LM (2017) Feedrate scheduling for interpolation of parametric tool path using the sine series representation of jerk profile. Proc Inst Mech Eng B J Eng Manuf 231(13):2359–2371. https://doi.org/10.1177/0954405416629588
Guo XG, Wang DC, Li CX, Liu YD (2002) A rapid and accurate positioning method with linear deceleration in servo system. Int J Mach Tools Manuf 42(7):851–861. https://doi.org/10.1016/S0890-6955(02)00010-X
Lee AC, Lin MT, Pan YR, Lin WY (2011) The feedrate scheduling of NURBS interpolator for CNC machine tools. Comput Aided Des 43(6):612–628. https://doi.org/10.1016/j.cad.2011.02.014
Dong J, Stori JA (2004) Optimal feed-rate scheduling for high-speed contouring. J Comput Des Eng 129(1):63–76. https://doi.org/10.1115/1.2280549
Nam S-H, Yang M-Y (2004) A study on a generalized parametric interpolator with real-time jerk-limited acceleration. Computer-Aided Design 36(1):27–36. https://doi.org/10.1016/S0010-4485(03)00066-6
Fang Y, Qi J, Hu J, Wang WM, Peng YH (2020) An approach for jerk continuous trajectory generation of robotic manipulators with kinematical constraints. Mech Mach Theory 153. https://doi.org/10.1016/j.mechmachtheory.2020.103957
Huang J, Zhu LM (2017) Feedrate scheduling for interpolation of parametric tool path using the sine series representation of jerk profile. Proc Inst Mech Eng, Part B 231(13):2359–2371. https://doi.org/10.1177/0954405416629588
Beudaert X, Lavernhe S, Tournier C (2012) Feedrate interpolation with axis jerk constraints on 5-axis NURBS and G1 tool path. Int J Mach Tools Manuf 57:73–82. https://doi.org/10.1016/j.ijmachtools.2012.02.005
Timar SD, Farouki RT, Smith TS, Boyadjieff CL (2005) Algorithms for time-optimal control of CNC machines along curved tool paths. Robot Comput Integr Manuf 21(1):37–53. https://doi.org/10.1016/j.rcim.2004.05.004
Sun Y, Zhao Y, Bao Y, Guo D (2014) A novel adaptive-feedrate interpolation method for NURBS tool path with drive constraints. Int J Mach Tools Manuf 77:74–81. https://doi.org/10.1016/j.ijmachtools.2013.11.002
Lu L, Zhang J, Fuh JYH, Han J, Wang H (2020) Time-optimal tool motion planning with tool-tip kinematic constraints for robotic machining of sculptured surfaces. Robot Comput Integr Manuf 65:101969. https://doi.org/10.1016/j.rcim.2020.101969
Erkorkmaz K, Altintas Y (2001) High speed CNC system design. Part I: jerk limited trajectory generation and quintic spline interpolation. Int J Mach Tools Manuf 41(9):1323–1345. https://doi.org/10.1016/S0890-6955(01)00002-5
Du D, Liu Y, Guo X, Yamazaki K, Fujishima M (2010) An accurate adaptive NURBS curve interpolator with real-time flexible acceleration/deceleration control. Robot Comput Integr Manuf 26(4):273–281. https://doi.org/10.1016/j.rcim.2009.09.001
Lin MT, Tsai MS, Yau HT (2007) Development of a dynamics-based NURBS interpolator with real-time look-ahead algorithm. Int J Mach Tool Manu 47(15):2246–2262. https://doi.org/10.1016/j.ijmachtools.2007.06.005
Li YY, Feng JC, Wang YH, Yang JG (2009) Variable-period feed interpolation algorithm for high-speed five-axis machining. Int J Adv Manuf Technol 40:769–775. https://doi.org/10.1007/s00170-008-1390-z
Du X, Huang J, Zhu LM (2015) A complete S-shape feed rate scheduling approach for NURBS interpolator. J Comput Des Engg 2(4):206–217. https://doi.org/10.1016/j.jcde.2015.06.004
Luo FY, Zhou YF, Yin J (2007) A universal velocity profile generation approach for high-speed machining of small line segments with lookahead. Int J Adv Manuf Technol 35:505–518. https://doi.org/10.1007/s00170-006-0735-8
Liu Q, Liu H, Yuan S (2016) High accurate interpolation of NURBS tool path for CNC machine tools. Chin J Mech Eng 29(5):911–920. https://doi.org/10.3901/CJME.2016.0407.047
Ni H, Hu T, Zhang C, Ji S, Chen Q (2018) An optimized feedrate scheduling method for CNC machining with round-off error compensation. Int J Adv Manuf Technol 97:2369–2381. https://doi.org/10.1007/s00170-018-1986-x
Hepeng N, Zhang C, Chen Q, Ji S, Hu T, Liu Y (2019) A novel time-rounding-up-based feedrate scheduling method based on S-shaped ACC/DEC algorithm. Int J Adv Manuf Technol 104:2073–2088. https://doi.org/10.1007/s00170-019-03882-0
Funding
No financial support
Author information
Authors and Affiliations
Contributions
Tao he: conceptulization, methdology, writingoriginal draft, software, data curation, validation, writing-review and editing. Yujun Yang: supervision, writing-review and editing.
Corresponding author
Ethics declarations
Competing interests
All authors disclosed no relevant relationships.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
All authors agree to publish the paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
He, T., Yang, Y. A S-shape feedrate scheduling method with rounding error elimination. Int J Adv Manuf Technol 129, 5261–5269 (2023). https://doi.org/10.1007/s00170-023-12555-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-023-12555-y