
Abstract
The pneumatic constant force control device has been widely used in robot deburring, sanding, polishing, and other fields due to its good flexibility, simple control, and low cost. The force control accuracy of the pneumatic constant force system could be greatly affected by its nonlinear hysteresis characteristics in the process from the cylinder input to the force output at the end of the device. A rational Bezier-based state fitting method (BSFM) has been presented for calibrating the inherent nonlinearity of the low-cost pneumatic constant force system. Compared with the most widely used PSFM, which is a polynomial-based state fitting method, the BSFM could calibrate the strong inherent nonlinearity of the system more smoothly with the lower ordered model and in a continuous form rather than the piecewise form of the PSFM. The BSFM could maintain a balance between simplicity and precision. Through a series of comparative experiments with different contact forces and feed rates, the proposed method has smaller force overshoot and when active force control is turned on, the force variation is greatly reduced to less than 2 N. The average roughness of the workpiece reached 0.4 µm after polishing.









Similar content being viewed by others

Availability of data and material
All data generated or analyzed during this study are included in this published article and its supplementary information files.
Code availability
Not applicable.
References
Mohammad AEK, Wang D (2016) Electrochemical mechanical polishing technology: recent developments and future research and industrial needs. Int J Adv Manuf Technol 86:1–16. https://doi.org/10.1007/s00170-015-8119-6
Tian F, Li Z, Lv C, Liu G (2016) Polishing pressure investigations of robot automatic polishing on curved surfaces. Int J Adv Manuf Technol 87:639–646. https://doi.org/10.1007/s00170-016-8527-2
Huang T, Li C, Wang Z, Sun L, Chen G (2016) Design of a flexible polishing force control flange. 2016 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO)
Zhang GL, Zhang J, Jiang Y, Yang GL, Zhang C (2018) Review of robotic end-effector with force control. Chin J Eng Des 617–629. https://doi.org/10.3785/j.issn.1006-754X.2018.06.001
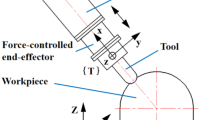
Mohammad A, Hong J, Danwei Wang D (2018) Design of a force-controlled end-effector with low-inertia effect for robotic polishing using macro-mini robot approach. Robot Comput Integr Manuf 49:54–65. https://doi.org/10.1016/j.rcim.2017.05.011
Li J, Guan Y, Chen H, Wang B, Zhang H (2020) A high-bandwidth end-effector with active force control for robotic polishing. IEEE Access 8:169122–169135. https://doi.org/10.1109/ACCESS.2020.3022930
https://www.ferrobotics.com/en/services/products/active-contact-flange-kit/. Accessed 10 Jun 2022
https://www.ati-ia.com/Products/deburr/deburring_home.aspx. Accessed 10 Jun 2022
Liao L, Xi FJ, Liu K (2010) Adaptive control of pressure tracking for polishing process. J Manuf Sci Eng 132. https://doi.org/10.1115/1.4000959
Jin M, Ji S, Ye P, Ao H, Han S (2016) Effect of downward depth and inflation pressure on contact force of gasbag polishing. Precis Eng 47:81–89. https://doi.org/10.1016/j.precisioneng.2016.07.007
Huang T, Sun L, Wang Z, Xinyi YU, Chen G (2017) Hybrid force/position control method for robotic polishing based on passive compliance structure. Robot 39:776–785, 794. https://doi.org/10.13973/j.cnki.robot.2017.0776
Ma WC (2019) Design and research on constant force control device for robot grinding
Zhang GL, Yang GL, Zhang J, Liu LT, Deng YM (2020) Research on asymmetric hybrid robot end-effector and its static force control characteristics. J Ningbo Univ Sci Technol 33:7
Xie S, Ren G, Wang B (2020) A modified asymmetric generalized Prandtl–Ishlinskii model for characterizing the irregular asymmetric hysteresis of self-made pneumatic muscle actuators. Mech Mach Theory 149:103836. https://doi.org/10.1016/j.mechmachtheory.2020.103836
Yu ZL (2019) Study on hysteresis compensation and control method of piezoelectric ceramic actuator. https://doi.org/10.27061/d.cnki.ghgdu.2019.005163
Qi J, Feng J (2019) Design of robotic soft fingertip for contact sensing. Measurement 147:106812–106812. https://doi.org/10.1016/j.measurement.2019.07.040
Hua HL, Liao ZQ, Wu XF, Chen YJ (2021) A Bezier based state calibrating method for low-cost potentiometer with inherent nonlinearity – Science Direct. Measurement 178. https://doi.org/10.1016/J.MEASUREMENT.2021.109325
Wony P, Chudy F (2019) Linear-time geometric algorithm for evaluating Bézier curves. Comput Aid Des 118:102760–102760. https://doi.org/10.1016/j.cad.2019.102760
Funding
This research work is supported by the China Postdoctoral Science Foundation project (No. 2019M651965).
Author information
Authors and Affiliations
Contributions
The force control accuracy of the pneumatic constant force system could be greatly affected by its nonlinear hysteresis characteristics in the process from the cylinder input to the force output at the end of the device. A rational Bezier-based state fitting method (BSFM) has been presented for calibrating the inherent nonlinearity of the low-cost pneumatic constant force system. The BSFM could maintain a balance between simplicity and precision.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chen, Y., Zhao, J. & Jin, Y. An improved rational Bezier model for pneumatic constant force control device of robotic polishing with hysteretic nonlinearity. Int J Adv Manuf Technol 123, 665–674 (2022). https://doi.org/10.1007/s00170-022-10193-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-022-10193-4