
Abstract
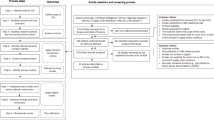
The logistics market has been impacted by increase of e-commerce, mass customization, omni-channel distribution, and just-in-time philosophy. In order to attend to this dynamic change, automation has been applied in warehouses. Although, some researches point out the lack of flexibility as a bottleneck. Therefore, a comprehensive literature review of recent papers is vital to draw a framework of the past and to shed light on future directions. This paper aims to review published papers in the last ten years related to flexible automation in warehouses and to construct a framework that could guide future researchers in the construction of an innovative conceptual model that may be applied at warehouses in the future. A total of 113 papers published between January 2008 and December 2018 have been selected, reviewed, and categorized to construct a useful foundation of past research. Results showed the key point to achieve a flexible automated warehouse is the combination of automated equipment, data collection technologies, and management solutions. Finally, based on the reviewed papers, an innovative framework of a flexible automated warehouse is proposed.




Similar content being viewed by others

References
Goetschalckx M, Ashayeri J (1989) Classification and design of order picking. Logistics World 2(2):99–106
Jovane F, Koren Y, Boër CR (2003) Present and future of flexible automation: towards new paradigms. CIRP Ann Manuf Technol 52(2):543–560
Casado F, Losada DP, Santana-Alonso A, et al. (2017) Pose estimation and object tracking using 2d images. Procedia Manuf 11:63–71
Petković T, Marković I, Petrović I (2017) Human intention recognition in flexible robotized warehouses based on markov decision processes. In: Iberian Robotics Conference, Springer, pp 629–640
Yamazaki Y, Shigematsu K, Kato S, Kojima F, Onari H, Takata S (2017) Design method of material handling systems for lean automation—integrating equipment for reducing wasted waiting time. CIRP Ann Manuf Technol 66(1):449–452
Bučková M, Krajčovič M, Jerman B (2017) Impact of digital factory tools on designing of warehouses. J Appl Eng Sci 15(2):173–180
Wang Q, McIntosh R, Brain M (2010) A new-generation automated warehousing capability. Int J Comput Integr Manuf 23(6):565–573
Mancio VG, Sellitto MA (2017) Sistemas flexíveis de manufatura: definições e quadro de trabalho para futura pesquisa. Revista GEINTEC-gestão Inovaç,ão e Tecnologias 7(2):3760–3773
Basile F, Chiacchio P, Del Grosso D (2012) A control oriented model for manual-pick warehouses. Control Eng Pract 20(12):1426–1437
López J, Pérez D, Vaamonde I, Paz E, Vaamonde A, Cabaleiro J (2016) Building a warehouse control system using ride. In: Robot 2015: Second Iberian Robotics Conference, Springer, pp 757–768
Groover MP (2007) Fundamentals of modern manufacturing: materials processes, and systems. John Wiley & Sons
Craig JJ (2013) Introduction to robotics, mechanics and control 3.ed. 3 edition
MacDuffie JP, Pil FK (1997) From fixed to flexible: automation and work organization trends from the INternational Assembly Plant. Transforming Automobile Assembly, pp 238?-254
Gania IP, Stachowiak A, Oleśków-szłapka J (2017) Flexible manufacturing systems Industry 4.0 solution Number icpr
Wiktorsson M, Granlund A, Lundin M, Södergren B (2017) Automation and flexibility: an apparent or real dilemma? In: Innovative quality improvements in operations, Springer, pp 35–48
Zúñiga ER, Moris MU, Syberfeldt A (2017) Integrating simulation-based optimization, lean, and the concepts of industry 4.0. In: 2017 Winter Simulation Conference (WSC), IEEE, pp 3828–3839
Ying Y, Wang X, Zhong RY, Huang GQ (2017) E-commerce logistics in supply chain management implementations and future perspective in furniture industry. Ind Manage Data Syst 117(10):2263–2286
Kaihara T, Yao Y (2012) A new approach on cps-based scheduling and wip control in process industries. In: Proceedings of the 2012 Winter Simulation Conference (WSC), IEEE, pp 1–11
CSCMP (2013) Supply chain management. TERMS and GLOSSARY. Supply chain management terms and glossary, (August):1?222
Goetschalckx M, McGinnis L, Sharp G, Bodner D, Govindaraj T, Huang K (2002) Development of a design methodology for warehousing systems: hierarchical framework. p 1
de Koster R, Le-Duc T, Jan Roodbergen K (2007) Design and control of warehouse order picking: a literature review. Eur J Oper Res 182(2):481–501
Dallari F, Marchet G, Melacini M (2009) Design of order picking system. Int J Adv Manuf Technol 42 (1-2):1–12
Connolly C (2008) Warehouse management technologies. Sens Rev 28(2):108–114
Lagorio A, Pinto R, Golini R (2016) Research in urban logistics: a systematic literature review. Int J Phys Distr Log Manage 46(10):908–931
Govindan K, Soleimani H, Kannan D (2015) Reverse logistics and closed-loop supply chain: a comprehensive review to explore the future. Eur J Oper Res 240(3):603–626
Ulutas BH, Attila Islier A (2009) A clonal selection algorithm for dynamic facility layout problems. J Manuf Syst 28(4):123–131
Accorsi R, Manzini R, Maranesi F (2014) A decision-support system for the design and management of warehousing systems. Comput Ind 65(1):175–186
Nestinger SS, Bo C, Cheng HH (2010) A mobile agent-based framework for flexible automation systems. Ieee/Asme Trans Mech 15(6):942–951
Bottin M, Boschetti G, Rosati G (2018) A novel collision avoidance method for serial robots
Boschetti G (2016) A picking strategy for circular conveyor tracking. Journal of Intelligent and Robotic Systems: Theory and Applications 81(2):241–255
Castello E, Yamamoto T, Libera FD, Liu W, Winfield AFT, Nakamura Y, Ishiguro H (2016) Adaptive foraging for simulated and real robotic swarms: the dynamical response threshold approach. Swarm Intelligence 10(1):1–31
Kuan-Yu H, Chang T-S (2010) An innovative automated storage and retrieval system for b2c e-commerce logistics. Int J Adv Manuf Tech 48(1-4):297–305
Jiang Cao J, Li Y (2009) An intelligent control system for digital workshop production. Appl Mech Mater 16-19:75–83
Chetouane F (2015) An overview on rfid technology instruction and application. IFAC-PapersOnLine 48 (3):382–387
Wang M, Guo L, Zhang Y, Liang X (2015) A method of mobile robotic drilling trajectory planning for large-scale components. In: ASME 2015 International Mechanical Engineering Congress and Exposition, American Society of Mechanical Engineers, pp v02BT02a064–v02BT02a064
Kuo R-J, Tseng WL, Tien FC, Warren Liao T (2012) Application of an artificial immune system-based fuzzy neural network to a rfid-based positioning system. Comput Ind Eng 63(4):943–956
Granlund A, Wiktorsson M (2014) Automation in internal logistics: strategic and operational challenges. Int J Logist Syst Manag 18(4):538–558
Zhang Z, Guo Q, Chen J, Yuan P (2018) Collision-free route planning for multiple agvs in an automated warehouse based on collision classification. IEEE Access 6:26022–26035
Draganjac I, Miklić D, Kovačić Z, Vasiljević G, Bogdan S (2016) Decentralized control of multi-agv systems in autonomous warehousing applications. IEEE Trans Autom Sci Eng 13(4):1433–1447
Naveen SK, Rajesh KD, Pal Pandian P (2014) . Design and fabrication of flexible three link manipulator for pick and place application 592:2134–2138
Quintero C, Kariv I (2009) Design and implementation of an automated compound management system in support of lead optimization. J Biomol Screen 14(5):499–508
Biglarbegian M, Melek WW, Mendel JM (2011) Design of novel interval type-2 fuzzy controllers for modular and reconfigurable robots: theory and experiments. IEEE Trans Ind Electron 58(4):1371–1384
Han L, Mao H, Kumi F, Hu J (2018) Development of a multi-task robotic transplanting workcell for greenhouse seedlings
Bi ZM, Lang SYT, Verner M, Orban P (2008) Development of reconfigurable machines. Int J Adv Manuf Technol 39(11-12):1227–1251
Joseph OA, Sridharan R (2012) Effects of flexibility and scheduling decisions on the performance of an fms: simulation modelling and analysis. Int J Prod Res 50(7):2058–2078
Kootbally Z, Schlenoff C, Antonishek B, Proctor F, Kramer T, Harrison W, Downs A, Gupta S (2018) Enabling robot agility in manufacturing kitting applications. Integrated Computer-Aided Engineering, (Preprint), pp 1–20
Giusti A, Zeestraten MJA, Icer E, Pereira A, Caldwell DG, Calinon S, Althoff M (2018) Flexible automation driven by demonstration: leveraging strategies that simplify robotics. IEEE Robot Autom Mag 25(2):18–27
Iwasaki Y, Suzuki I, Yamamoto M, Furukawa M (2013) Job-shop scheduling approach to order-picking problem. Transactions of the Institute of Systems, Control and Information Engineers 26(3):103–109
Savino MM, Mazza A (2015) Kanban-driven parts feeding within a semi-automated o-shaped assembly line: a case study in the automotive industry. Assem Autom 35(1):3–15
Faccio M, Gamberi M, Bortolini M, Pilati F (2018) Macro and micro-logistic aspects in defining the parts-feeding policy in mixed-model assembly systems. International Journal of Services and Operations Management 31(4):433–462
Huang M, Guo Q, Liu J, Huang X (2018) Mixed model assembly line scheduling approach to order picking problem in online supermarkets. Sustainability 10(11):3931
Finetto C, Faccio M, Rosati G, Rossi A (2014) Mixed-model sequencing optimization for an automated single-station fully flexible assembly system (f-fas). Int J Adv Manuf Tech 70(5-8):797–812
Gao L, Thomas DJ, Freimer MB (2014) Optimal inventory control with retail pre-packs. Prod Oper Manag 23(10):1761–1778
Manzini R, Accorsi R, Baruffaldi G, Santi D, Tufano A (2018) Performance assessment in order picking systems: a visual double cross-analysis. The International Journal of Advanced Manufacturing Technology, pp 1–12
Bi ZM, Lang SYT, Shen W, Wang L (2008) Reconfigurable manufacturing systems: the state of the art. Int J Prod Res 46(4):967–992
Zhong RY, QY Dai TQ, Hu GJ, Huang GQ (2013) Rfid-enabled real-time manufacturing execution system for mass-customization production. Robot Comput Integr Manuf 29(2):283–292
Mejjaouli S, Babiceanu RF (2015) Rfid-wireless sensor networks integration: decision models and optimization of logistics systems operations. J Manuf Syst 35:234–245
Dharmara K, Monfared RP, Ogun PS, Jackson MR (2018) Robotic assembly of threaded fasteners in a non-structured environment. Int J Adv Manuf Tech 98(5-8):2093–2107
Radi M, Reiter A, Zaidan S, Reinhart G, Nitsch V, Färber B (2010) Telepresence in industrial applications: implementation issues for assembly tasks. Presence: Teleoperators and Virtual Environments 19(5):415–429
Derby S, Eckert G, Brown D, McFadden J (2013) The compact flowbot: a robotic pick and place motion system (patent pending). Ind Robot: An Int J 40(2):106–110
Bauernhansl T, Hartleif S, Felix T (2018) The digital shadow of production–a concept for the effective and efficient information supply in dynamic industrial environments. Procedia CIRP 72:69–74
Weeks K, Guiffrida A, Safa M (2016) The efficacy of routing and flexibility on financial performance within an international manufacturing setting. Int J Res Dev 7(1):63–83
Liu C-H, Chiu C-H, Chen T-L, Pai T-Y, Hsu M-C, Chen Y (2018) Topology optimization and prototype of a three-dimensional printed compliant finger for grasping vulnerable objects with size and shape variations. J Mech Robot 10(4):044502
Huo Y, Blaber J, Damon SM, Boyd BD, Bao S, Parvathaneni P, Noguera CB, Chaganti S, Nath V, Greer JM, Lyu I, French WR, Newton AT, Rogers BP, Landman BA (2018) Towards portable large-scale image processing with high-performance computing. J Digit Imaging
Hilmola O-P, Tolli A (2016) Warehouse layout implications on picking distance: case of human factor. World Review of Intermodal Transportation Research, 6(1)
Ogun PS, Usman Z, Dharmaraj K, Jackson MR (2015) 3d vision assisted flexible robotic assembly of machine components. In: Eighth international conference on machine vision (ICMV 2015), volume 9875, page 98751o. International society for optics and photonics
Sam R, Buniyamin N (2012) A bernoulli principle based flexible handling device for automation of food manufacturing processes. pp 214–219
Huang P-C, Mok AK (2018) A case study of cyber-physical system design autonomous pick-and-place robot. In: 2018 IEEE 24Th International Conference on Embedded and Real-time Computing Systems and Applications (RTCSA), IEEE, pp 22–31
Hildebrandt A-c, Schuetz C, Wahrmann D, Wittmann R, Rixen D (2017) A Flexible Robotic Framework for Autonomous Manufacturing Processes : Report from the European Robotics Challenge Stage 1, pp 53–59
Vittor T, Staab H, Breisch S, Soetebier S, Stahl T, Hackbarth A, Kock S (2011) A flexible robotic gripper for automation of assembly tasks: a technology study on a gripper for operation in shared human environments. pp 1–6
Estévez E, Pérez F, Orive D, Marcos M (2017) A novel approach for flexible automation production systems. pp 695–699
Xiao-Long W, Chun-Fu W, Li G-D, Qing-Xie C (2017) A robot navigation method based on rfid and qr code in the warehouse. In: 2017 Chinese Automation Congress (CAC), IEEE, pp 7837–7840
Merkumians MM, Baierling M, Schitter G (2016) A service-oriented domain specific language programming approach for batch processes. pp 1–9
Hedberg T, Helu M, Sprock T (2018) A standards and technology roadmap for scalable distributed manufacturing systems. In: ASME 2018 13Th International Manufacturing Science and Engineering Conference, American Society of Mechanical Engineers, pp v003t02a019–v003t02a019
Hansen K, Pedersen J, Sølund T, Aanæs H, Kraft D (2014) A structured light scanner for hyper flexible industrial automation. In: 2014 2Nd International Conference on 3d Vision, vol 1, IEEE, pp 401–408
Tavares P, Sousa A (2015) Flexible pick and place architecture using ros framework. In: 2015 10Th Iberian Conference on Information Systems and Technologies (CISTI), IEEE, pp 1–6
Neugschwandtner G, Reekmans M, van der Linden D (2013) An open automation architecture for flexible manufacturing. pp 1–5
Choi S, Zhang G, Fuhlbrigge T, Watson T, Tallian R (2013) Applications and requirements of industrial robots in meat processing. pp 1107–1112
Basile F, Chiacchio P, Coppola J, systems DG (2015) Automated warehouse a cyber-physical system perspective. In: 2015 IEEE 20Th Conference on Emerging Technologies & Factory Automation (ETFA), IEEE, pp 1–4
Elango M, Nachiappan SP (2011) Balancing multi-robot prioritized task allocation a simulation approach. In: 2011 IEEE International Conference on Industrial Engineering and Engineering Management, IEEE, pp 1725–1729
Rosati G, Faccio M, Carli A, Rossi A (2011) Convenience analysis and validation of a fully flexible assembly system. In: ETFA2011, IEEE, pp 1–8
Patil S, Vyatkin V, Pang C (2015) Counterexample-guided simulation framework for formal verification of flexible automation systems. In: 2015 IEEE 13Th International Conference on Industrial Informatics (INDIN), IEEE, pp 1192–1197
Park JY, Moon H (2012) Design and control of 2 degree-of-freedom air jet array for manipulating flat objects. pp 467–468
Sam R, Nefti S (2008) Design and development of flexible robotic gripper for handling food products. In: 2008 10Th International Conference on Control, Automation, Robotics and Vision, IEEE, pp 1684–1689
Ribeiro T, Garcia I, Pereira D, Ribeiro J, Lopes G, Ribeiro AF (2017) Development of a prototype robot for transportation within industrial environments. pp 192–197
Kobata T, Tada Y, Muromaki T (2016) Development of automatic parcel delivery system using image processing techniques. pp 292–295
Ferreira EP, Miranda VM (2011) Development of static neural networks as full predictors or controllers for multi-articulated mobile robots in backward movements-new models and tools. In: 2011 9th IEEE International Conference on Control and Automation (ICCA), IEEE, pp 985–990
Chou T-S, Chang S-Y, Lu Y-F, Wang Y-C, Ouyang MK, Shih C-S, Kuo T-W, Hu JS, Liu JW-S (2009) Emwf for flexible automation and assistive devices. In 2009 15th IEEE Real-Time and Embedded Technology and Applications Symposium, IEEE, pp 243–252
Effenberger I, Kühnle J, Verl A (2013) . Fast and flexible 3d object recognition solutions for machine vision applications 8661:86610N
Soetebier S, Muller C, Mauser N, Kock S, Legeleux F (2008) Flexible automation for automotive body assembly. In: 2008 IEEE International Conference on Automation Science and Engineering, IEEE, pp 341–346
Hata S, Hiroyasu T, Hayash J, Hojoh H, Hamada T (2009) Flexible handling robot system for cloth. In: 2009 International Conference on Mechatronics and Automation, IEEE, pp 49–54
Holzmuller-Laue S, Rimane K, Neubert S, Kreuzfeld S, Arndt D, Gode B, Thurow K, Stoll R (2008) Flexible r&d integration platform of process informatics for automated medical applications and mobile data acquisition. pp 621–626
Chu X, Roddelkopf T, Fleischer H, Stoll N, Klos M, Thurow K (2016) Flexible robot platform for sample preparation automation with a user-friendly interface. In: 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), IEEE, pp 2033–2038
Zaepernick N (2013) From rapid prototyping to emanufacturing. pp 176–180
Frischkorn F, Miesner J, Glass S (2008) . Full automatic packaging of a hybrid transceiver module 6899:2–6
Angerer S, Strassmair C, Staehr M, Roettenbacher M, Robertson NM (2012) Give me a hand—the potential of mobile assistive robots in automotive logistics and assembly applications. pp 111–116
Koppensteiner G, Schwingenschlögl C, Merdan M, Zoitl A (2012) Implementation of an event-based low-level control for mobile robots. pp 135–140
Rane AB, Sudhakar DSS, Rane S, et al. (2015) Improving the performance of assembly line: review with case study. In: 2015 International Conference on Nascent Technologies in the Engineering Field (ICNTE), IEEE, pp 1–14
Franke J, Hofmann B, Tremel J, Meyer A (2015) Innovative methods for automated assembly and fixation of permanent magnets in electrical machines. Procedia CIRP 26:724–728
Adeyeri MK, Mpofu K, Olukorede TA (2015) Integration of agent technology into manufacturing enterprise: a review and platform for industry 4.0., pp 1–10
Pedersen Mikkel R, Herzog Dennis L, Krüger V (2014) Intuitive skill-level programming of industrial handling tasks on a mobile manipulator. In: 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, pp 4523–4530
Syberfeldt A, Ayani M, Holm M, Wang L, Lindgren-Brewster R (2016) Localizing operators in the smart factory: a review of existing techniques and systems. In: 2016 International Symposium on Flexible Automation (ISFA), IEEE, pp 179– 185
Lenz C, Knoll A (2014) Mechanisms and capabilities for human robot collaboration. In: The 23rd IEEE International Symposium on Robot and Human Interactive Communication, IEEE, pp 666–671
Mazzolini M, Brusaferri A, Carpanzano E (2010) Model-checking based verification approach for advanced industrial automation solutions. In: 2010 IEEE 15Th Conference on Emerging Technologies & Factory Automation (ETFA 2010), IEEE, pp 1–8
Schmitt R, Pfeifer T, Pavim A, Stemmer M, Hübner J, Roloff M (2011) Multiagent-based approach for the automation and quality assurance of the small series production. In: ETFA2011, IEEE, pp 1–8
Kang S, Kim K (2017) Multiple concurrent operations and flexible robotic picking for manufacturing process environments. In: 2017 14Th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), IEEE, pp 380–381
Akan B, Çürüklü B, Spampinato G, Asplund L (2009) Object selection using a spatial language for flexible assembly. In: 2009 IEEE Conference on Emerging Technologies & Factory Automation, IEEE, pp 1–6
Zoitl A, Strasser T, Valentini A (2010) Open source initiatives as basis for the establishment of new technologies in industrial automation: 4diac a case study. In: 2010 IEEE International Symposium on Industrial Electronics, IEEE, pp 3817–3819
Pesic J, Morea A (2015) Operating a network close to the “zero margin” regime thanks to elastic devices. In: 2015 17Th International Conference on Transparent Optical Networks (ICTON), IEEE, pp 1–1
Zhao J, Ding Y, Tian C, Hao C, Meng L (2017) Path planning of the omni-directional mobile vehicle in warehouse environment. In: 2017 Chinese Automation Congress (CAC), IEEE, pp 4147–4152
Caridá VF, Morandin O, Cerioni PR, Tuma CCM (2014) Prediction model using coverability tree from a modeling in petri nets applied in agvs dispatching. In: Brazilian Conference on Intelligent Systems, IEEE, pp 140–145
Holfeld B, Wieruch D, Raschkowski L, Wirth T, Pallasch C, Herfs W, Brecher C (2016) Radio channel characterization at 5.85 ghz for wireless m2m communication of industrial robots. In: 2016 IEEE Wireless Communications and Networking Conference, IEEE, pp 1–7
Fan Y, Te T, Lin H-C, Zhao Y, Tomizuka M (2017) Real-time robust finger gaits planning under object shape and dynamics uncertainties. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, pp 1267–1273
Popescu D, Ionete C, Aguridan R, Popescu L, Meng Q, Ionete AA (2009) Remote vs. simulated, virtual or real-time automation laboratory. In: 2009 IEEE International Conference on Automation and Logistics, IEEE, pp 1410–1415
Chun-Fu W, Xiao-Long W, Qing-Xie C, Xiao-Wei C, Li Guo-Dong (2017) Research on visual navigation algorithm of agv used in the small agile warehouse. In: 2017 Chinese Automation Congress (CAC), IEEE, pp 217–222
Jost J, Kirks T, Gupta P, Lunsch D, Stenzel J (2018) Safe human-robot-interaction in highly flexible warehouses using augmented reality and heterogenous fleet management system. In: IEEE International Conference on Intelligence and Safety for Robotics, pp 256–260
Moser T, Biffl S (2012) Semantic integration of software and systems engineering environments. IEEE Transactions on Systems, Man, and cybernetics, Part C (Applications and Reviews) 42(1):38–50
Dose S, Dillmann R (2012) Shop floor based programming of assembly assistants for industrial pick-and-place applications. In: 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, pp 4966–4971
Wirabhuana A, Haron H, Imtihan MR (2008) Simulation and re-engineering of truck assembly line. In: 2008 Second Asia International Conference on Modelling & Simulation (AMS), IEEE, pp 783–787
Kuehl A, Furlan S, Gutmann J, Meyer M, Franke J (2017) In: 2017 IEEE International Electric Machines and Drives Conference (IEMDC), IEEE, pp 1–6
Jasper D, Edeler C, Diederichs C, Naroska M, Stolle C, Fatikow S (2009) Towards automated robotic nanomanipulation systems. In: IEEE/ASME International Conference on Advanced Intelligent Mechatronics
Hjorth TJ, Gupta P, Balasubramanian A (2016) University implements distribution automation to enhance system reliability and optimize operations. In: 2016 69Th Annual Conference for Protective Relay Engineers (CPRE), IEEE, pp 1–8
Nerakae P, Uangpairoj P, Chamniprasart K (2016) Using machine vision for flexible automatic assembly system. Procedia Comput Sci 96:428–435
Ciubucciu G, Solea R, Filipescu A, Filipescu A (2017) . Visual servoing and obstacle avoidance method based control autonomous robotic systems servicing a mechatronics manufacturing line 2:874–879
Zheng H, Chen L, Zhao X, Liu Z (2016) Design of control system for flexible packaging bags palletizing production line based on plc. In: Mechanical Engineering and Control Systems: Proceedings of 2015 International Conference on Mechanical Engineering and Control Systems (MECS2015), pp 206– 209
Tompkins JA, White JA, Bozer YA, Tanchoco JMA (2010) Facilities planning. John Wiley & Sons
Groover MP (2011) Automação industrial e sistemas de manufatura. Pearson Education do Brasil
Manzini R, Gamberi M, Regattieri A (2006) Design and control of an AS/RS. Int J Adv Manuf Technol 28(7-8):766–774
Shivanand HK, Benal MM, Koti V (2006) Flexible Manufacturing system, volume 91. New Age International
Acknowledgements
This study received financial support from the Brazilian funding agency FAPEG.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Custodio, L., Machado, R. Flexible automated warehouse: a literature review and an innovative framework. Int J Adv Manuf Technol 106, 533–558 (2020). https://doi.org/10.1007/s00170-019-04588-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-019-04588-z