
Abstract
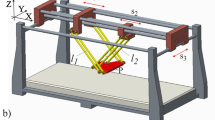
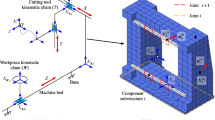
A 5-dof 4SPS+SPR parallel machine tool with four SPS-type active legs and one SPR-type active leg is proposed. Its inverse kinematics is analysed by using an analytic approach and a CAD variation geometry approach. Some analytic formulae for solving the active/passive forces are derived by adopting a vector approach. First, a simulation mechanism of the 4SPS+SPR parallel machine tool is created and some kinematic characteristics are analysed. Second, the formulae for solving its inverse kinematics and the Jacobian matrix are derived and a reachable workspace is constructed. Third, the poses of the active/passive forces are analysed and an active/passive force transformation matrix and the analytic formulae for solving the active/passive forces of the 4SPS+SPR parallel machine tool are derived. The analytic results are verified by the simulation mechanism.
Similar content being viewed by others

References
Zhang S, Heisel U (2003) Parallel machine tool. Machinery Industry Press, Beijing, China
Niku SB (2004) Introduction to robotics: analysis, systems, applications. Pearson Education, Inc. publishing as Prentice Hall, and the Publishing House of Electronics Industry, Beijing, China
Huang Z, Kong LF, Fang YF (1997) Theory on parallel robotics and control. Machinery Industry Press, Beijing, China
Zhang D, Wang L, Lang SYT (2005) Parallel kinematic machines: design, analysis and simulation in an integrated virtual environment. Trans ASME J Mech Des 127(4):580–588
Lu Y (2006) Simulation of machining 3D free-form surface in normal direction using 6-SSP and 4SPS+UPU parallel machine tools. International Journal of Advanced Manufacturing Technology, ISSN: 0268–3768 (paper) 1433–3015 (Online)
Lu Y (2005) Computer-aided geometric machining of a 3D free surface using a 3-UPU spatial parallel machine tool. Int J Adv Manuf Technol 26(9–10):1018–1025
Lu Y, Leinonen T (2002) A computer simulation approach to machining complicated shapes on an orthogonal 6-rod machine tool. Int J Mach Tools Manuf 42(3):441–447
Lu Y (2002) Computer simulation applied to an orthogonal three-rod machine tool for machining a complicated three-dimensional surface. Int J Mach Tools Manuf 42(11):1277–1284
Dasgupta B, Mruthunjaya TS (1998) A Newton-Euler formulation for the inverse dynamics of the Stewart platform manipulator. Mech Mach Theory 33(8):1135–1152
Gallardo J, Rico JM, Frisoli A, Checcacci D, Bergamasco M (2003) Dynamics of parallel manipulators by means of screw theory. Mech Mach Theory 38(11):1113–1131
Russo A, Sinatra R, Xi F (2005) Static balancing of parallel robots. Mech Mach Theory 40(2):191–202
Ider SK (2005) Inverse dynamics of parallel manipulators in the presence of drive singularities. Mech Mach Theory 40(1):33–44
Li M, Huang T, Mei J, Zhao X, Chetwynd DG, Hu SJ (2005) Dynamic formulation and performance comparison of the 3-DOF modules of two reconfigurable PKM—the Tricept and the TriVariant. Trans ASME J Mech Des 127(5):1129–1136
Dasgupta B, Mruthyunjaya TS (1998) Force redundancy in parallel manipulators: theoretical and practical issues. Mech Mach Theory 33(6):727–742
Nokleby SB, Fisher R, Podhorodeski RP, Firmani F (2005) Force capabilities of redundantly-actuated parallel manipulators. Mech Mach Theory 40(5):578–599
Chakarov D (1999) Study of the passive compliance of parallel manipulators. Mech Mach Theory 34(3):373–389
Wang S-C, Hikita H, Kubo H, Zhao Y-S, Huang Z, Ifukube T (2003) Kinematics and dynamics of a 6 degree-of-freedom fully parallel manipulator with elastic joints. Mech Mach Theory 38(5):439–461
Lu Y (2006) Using virtual work theory and CAD functionalities for solving driving force and passive force of spatial parallel manipulators. Mech Mach Theory. DOI 10.1016/j.mechmachtheory.2006.06.011
Lu Y (2004) Using CAD functionalities for the kinematics analysis of spatial parallel manipulators with 3-, 4-, 5-, 6-linearly driven limbs. Mach Mech Theory 39(1):41–60
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lu, Y., Hu, B. & Xu, JY. Kinematics analysis and solution of the active/passive forces of a 4SPS+SPR parallel machine tool. Int J Adv Manuf Technol 36, 178–187 (2008). https://doi.org/10.1007/s00170-006-0833-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-006-0833-7