
Abstract
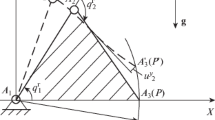
Full load motion of mobile manipulators while carrying a load with pre-defined motion precision is an important consideration in their application. Therefore, in this paper a general formulation for finding the maximum load-carrying capacity of compliant joint mobile manipulators is presented. The overturning stability of the system and the precision of the motion on the given end effector trajectory are taken into account. The main constraints used for the algorithm presented are the actuator torque capacity, the limited error bound for the end effector and the overturning stability during motion on the given trajectory. This paper presents a strategy for determining the dynamic load-carrying capacity (DLCC), subject to overturning stability, accuracy and actuator constraints, in which a series of ball-type bounds centred at the desired trajectory is used in the end effector oscillation constraint, while a typical d.c. motor speed-torque characteristics curve is used in the actuator constraint. The technique, which considers the full nonlinear mobile manipulator dynamics, actuator constraint, overturning stability constraint, and accuracy constraint, permits the user to specify the trajectory completely. In order to verify the effectiveness of the algorithm presented, a simulation study considering a compliant joint two-link planar manipulator mounted on a differentially driven mobile base is given with details.
Similar content being viewed by others

References
Thomas M, Yuan-Chou HC, Tesar D (1985) Optimal actuator sizing for robotic manipulators based on local dynamic criteria. J Mech Transmiss Autom Des 107:163–169
Wang LT, Ravani B (1988) Dynamic load carrying capacity of mechanical manipulators: I. Problem formulation. J Dyn Sys Meas Control 110:46–52
Wang LT, Ravani B (1988) Dynamic load carrying capacity of mechanical manipulators: II. Computational method and applications. J Dyn Sys Meas Control 110:46–52
Korayem MH, Basu A (1994) Formulation and numerical solution of elastic robot dynamic motion with maximum load carrying capacity. Robotica 12:253–261
Korayem MH, Basu A (1994) Dynamic load carrying capacity for robotic manipulators with joint elasticity imposing accuracy constraints. Robot Auton Sys 13:219–229
Yue S, Tso SK, Xu WL (2001) Maximum dynamic payload trajectory for flexible robot manipulators with kinematic redundancy. Mech Mach Theory 36:785–800
Korayem MH, Ghariblu H (2003) Maximum allowable load on wheeled mobile manipulators imposing redundancy constraints. Robot Auton Sys 44(2):151–159
Fukuda T et al (1992) Manipulator/vehicle system for man-robot cooperation. In: Proceedings of the IEEE international conference on robotics and automation, pp 74–79
Papadopoulos EG, Ray DR (1996) A new measure of tip over stability margin for mobile manipulators. In: Proceedings of the IEEE international conference on robotics and automation, pp 3111–3116
Ghasempoor A, Sepehri N (1995) A measure of stability for mobile based manipulators. In: Proceedings of the IEEE international conference on robotics and automation, pp 2249–2254
Huang Q et al (2000) Coordinated motion planning for a mobile manipulator considering stability and manipulation. Int J Robot Res 19(8):732–742
Kim J et al (2002) Real time ZMP compensation method using null motion for mobile manipulator. In: Proceedings of the IEEE international conference on robotics and automation, pp 1967–1972
Rey DA, Papadopoulos EG (1997) Online automatic tip-over presentation for mobile and redundant manipulators. In: Proceedings of the IEEE international conference on intelligent robots and systems (IROS’97), pp 1273–1278
Papadopoulos E, Gonthier Y (1999) A frame force for large force task planning of mobile and redundant manipulators. J Robot Sys 16(3):151–162
Seraji H (1998) A unified approach to motion control of mobile manipulators. Int J Robot Res 17(12):107–118
Chung PH et al (2000) An extension to operational space for kinematically redundant manipulators: kinematics and dynamics. IEEE Trans Robot Autom 16(5):592–596
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Korayem, M., Ghariblu, H. & Basu, A. Optimal load of elastic joint mobile manipulators imposing an overturning stability constraint. Int J Adv Manuf Technol 26, 638–644 (2005). https://doi.org/10.1007/s00170-003-2021-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-003-2021-3