
Abstract
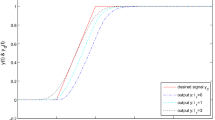
This paper studied the sliding mode preview tracking control of one-sided Lipschitz nonlinear discrete-time systems. First, an augmented system including tracking error and preview information is constructed by introducing a difference operator. Then, a sliding surface is designed, and a sufficient condition of asymptotic stability is derived for the sliding mode dynamics. A convex optimization problem based on LMI is formulated to avoid solving nonlinear matrix inequalities and the classification discussion when solving the controller. Next, a sliding mode preview control law is designed such that the reachability condition of the controlled system can be satisfied, and the output of original system can track the reference signal well. Finally, two simulation examples are given to verify the effectiveness of the proposed control scheme.













Similar content being viewed by others

Data Availability Statement
The data sets generated and analyzed during the current study are available from the corresponding author on reasonable request.
References
M. Abbaszadeh, H.J. Marquez, Nonlinear observer design for one-sided Lipschitz systems, in Proceedings of the 2010 American Control Conference (2010), pp. 5284–5289
S. Ahmad, M. Rehan, On observer-based control of one-sided Lipschitz systems. J. Frankl. Inst. 353(4), 903–916 (2016)
X. Chu, M. Li, Observer-based model following sliding mode tracking control of discrete-time linear networked systems with two-channel event-triggered schemes and quantizations. Appl. Math. Comput. 355, 428–448 (2019)
H. Fang, G. Zhu, V. Stojanovic, R. Nie, S. He, X. Luan, F. Liu, Adaptive optimization algorithm for nonlinear Markov jump systems with partial unknown dynamics. Int. J. Robust Nonlinear Control 31(6), 2126–2140 (2021)
S.S. Ge, C. Wang, Adaptive control of uncertain Chuas circuits. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 47(9), 1397–1402 (2000)
Y. Guo, S. Song, X. Li, Backstepping sliding mode control for formation flying spacecraft. IEEE Trans. Circuits Syst. Aircr. Eng. Aerosp. Technol. 90(1), 56–64 (2018)
G. Hu, Observers for one-sided Lipschitz non-linear systems. IMA J. Math. Control Inf. 23(4), 395–401 (2006)
C. Huang, H. Huang, Observer-based robust preview tracking control for a class of non-linear systems. IET Control Theory Appl. 14(7), 991–998 (2020)
L. Li, F. Liao, J. Deng, \(H_\infty \) preview control of a class of uncertain discrete-time systems. Asian J. Control 19(4), 1542–1556 (2017)
L. Li, Y. Lu, L. Gu, Preview control for a class of linear discrete-time periodic systems. Int. J. Control (2019). https://doi.org/10.1080/00207179.2019.1618497
F. Liao, C. Jia, U. Malik, X. Yu, J. Deng, The preview control of a class of linear systems and its application in the fault-tolerant control theory. Int. J. Control Autom. Syst. 50(5), 1017–1027 (2019)
F. Liao, L. Li, Robust preview control for uncertain discrete-time systems based on LMI. Optim. Control Appl. Methods 38(6), 1022–1031 (2017)
J. Liu, Y. Gao, X. Su, M. Wack, L. Wu, Disturbance-observer-based control for air management of PEM fuel cell systems via sliding mode technique. IEEE Trans. Control Syst. Technol. 27(3), 1129–1138 (2019)
S. Liu, Z. Xiang, Exponential \(H_\infty \) output tracking control for switched neutral system with time-varying delay and nonlinear perturbations. Circuits Syst. Signal Process. 32(1), 103–121 (2013)
B. Nail, A. Kouzou, A. Hafaifa, Robust block roots assignment in linear discrete-time sliding mode control for a class of multivariable system: gas turbine power plant application. Trans. Inst. Meas. Control 41(5), 1216–1232 (2019)
K.S. Narendra, K. Parthasarathy, Identification and control of dynamical systems using neural networks. IEEE Trans. Neural Netw. 1(1), 4–27 (1990)
C.M. Nguyen, P.N. Pathirana, H. Trinh, Robust observer-based control designs for discrete nonlinear systems with disturbances. Eur. J. Control 44, 65–72 (2018)
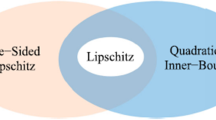
S.A. Nugroho, V. Hoang, M. Radosz, S. Wang, A.F. Taha, New insights on one-sided Lipschitz and quadratically inner-bounded nonlinear dynamic systems, in Proceedings of the 2020 American Control Conference (2020), pp. 4558–4563
D. Pri, N. Nedi, V. Stojanovi, A nature inspired optimal control of pneumatic-driven parallel robot platform. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 231(1), 59–71 (2017)
M. Rehan, S. Ahmad, K.S. Hong, Novel results on observer-based control of one-sided Lipschitz systems under input saturation. Eur. J. Control 53, 29–42 (2020)
M. Rehan, K.S. Hong, S.S. Ge, Stabilization and tracking control for a class of nonlinear systems. Nonlinear Anal. Real World Appl. 12(3), 1786–1796 (2011)
W. Saad, A. Sellami, G. Garcia, Robust integral sliding mode-\(H_\infty \) control of one-sided Lipschitz nonlinear systems. IET Control Theory Appl. 12(17), 2357–2367 (2018)
W. Saad, A. Sellami, G. Garcia, \(H_\infty \)-sliding mode control of one-sided Lipschitz nonlinear systems subject to input nonlinearities and polytopic uncertainties. ISA Trans. 90, 19–29 (2019)
T. Sato, T. Shiegami, T. Tsuchiya, Digital sliding mode servo systems with preview feedforward compensation. Electr. Eng. Jpn. 149(1), 33–43 (2004)
J. Song, S. He, Robust finite-time \(H_\infty \) control for one-sided Lipschitz nonlinear systems via state feedback and output feedback. J. Frankl. Inst. 352(8), 3250–3266 (2015)
V. Stojanovic, N. Nedic, D. Prsic, L. Dubonjic, V. Djordjevic, Application of cuckoo search algorithm to constrained control problem of a parallel robot platform. Int. J. Adv. Manuf. Technol. 87(9–12), 2497–2507 (2016)
G. Sun, L. Wu, Z. Kuang, Z. Ma, J. Liu, Practical tracking control of linear motor via fractional-order sliding mode. Automatica 94, 221–235 (2018)
H. Tao, P. Wang, Y. Chen, V. Stojanovic, H. Yang, An unsupervised fault diagnosis method for rolling bearing using STFT and generative neural networks. J. Frankl. Inst. 357(11), 7286–7307 (2020)
M. Tomizuka, D.E. Rosenthal, On the optimal digital state vector feedback controller with integral and preview actions. J. Dyn. Syst. Meas. Control Trans. ASME 101(2), 172–178 (1979)
C. Turchetti, G. Biagetti, F. Gianfelici, P. Crippa, Nonlinear system identification: an effective framework based on the Karhunen–Loeve transform. IEEE Trans. Signal Process. 57(2), 536–550 (2009)
B. Wu, D. Wang, E.K. Poh, Decentralized sliding-mode control for attitude synchronization in spacecraft formation. Int. J. Robust Nonlinear Control 23(11), 1183–1197 (2013)
Y. Yan, S. Yu, Sliding mode tracking control of autonomous underwater vehicles with the effect of quantization. Ocean Eng. 151, 322–328 (2018)
Y. Yan, S. Yu, C. Sun, Quantization-based event-triggered sliding mode tracking control of mechanical systems. Inf. Sci. 523, 296–306 (2020)
X. Yu, F. Liao, Preview tracking control for a class of discrete-time Lipschitz non-linear time-delay systems. IMA J. Math. Control Inf. 36(3), 849–867 (2019)
X. Yu, F. Liao, Output tracking control with preview action for a class of continuous-time Lipschitz nonlinear systems and its applications. Int. J. Control Autom. Syst. 26(21–22), 2081–2091 (2020)
X. Yu, F. Liao, J. Deng, Tracking controller design with preview action for a class of Lipschitz nonlinear systems and its applications. Circuits Syst. Signal Process. 39(6), 2922–2947 (2020)
X. Zhang, S. He, V. Stojanovic, X. Luan, F. Liu, Finite-time asynchronous dissipative filtering of conic-type nonlinear Markov jump systems. Sci. China Inf. Sci. (2021). https://doi.org/10.1007/s11432-020-2913-x
Y. Zhao, J. Tao, N. Shi, A note on observer design for one-sided Lipschitz nonlinear systems. Syst. Control Lett. 59(1), 66–71 (2010)
Acknowledgements
This work is supported by National Natural Science Foundation of China under Grants 61673100, 61703083 and Fundamental Research Funds for Central Universities under Grant N150504011.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sun, Q., Ren, J. Sliding Mode Preview Tracking Control of OSL Nonlinear Discrete-Time Systems. Circuits Syst Signal Process 41, 4347–4369 (2022). https://doi.org/10.1007/s00034-022-01986-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-022-01986-9