
Abstract
This paper proposes the use of a frequency converter used in the AC motor drives to build a fast charging battery converter for electric vehicles (EV). The possibility of using semiconductor integrated modules with two-level inverters and diode rectifiers for the construction of high power voltage DC/DC converters has been demonstrated. The DC voltage of the EV battery during charging is obtained by rectifying the three-phase voltage of the PWM inverter. A 600 V DC microgrid was used to power the inverter. Simulation tests of the DC/DC converter model were carried out. The results of simulation tests were verified experimentally on a laboratory stand.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The infrastructure for fast charging of large-capacity batteries of autonomous work machines is an important factor for their widespread use in industry. Lack of air pollution, quiet operation and limited heating of the environment are the basic features enabling the use of mobile machines powered by energy accumulated in the battery in many industries. The location of the fast battery charging station in the immediate surroundings of the workplace of work machines reduces the time required to charge their battery. It is expected that the participation of people and classic machines powered by internal combustion engines in the principles of mining, agriculture and many other onerous workplaces will be replaced by electric autonomous work machines. Battery powered electric machines meet stringent ecological requirements, safety and unattended operation. The use of artificial intelligence and machine learning algorithms to control work machines is already found even in household appliances.
In industry, drive frequency converters (FCs) are commonly used to power induction motors of adjustable speed. Low-voltage FCs reach powers of 2 MW and are located in the vicinity of motors, e.g. of pumps, belt conveyors, fans, etc. (Danfoss 2016). Usually, each high-power motor is powered by an individual frequency converter (Danfoss 2020). It can be argued that drive FCs are evenly distributed over the entire working surface of an industrial plant. The plant's AC network supplies energy to these converters and is equipped with safeguards appropriate for their nominal power.
The authors decided to use the existing industrial plant power supply system to develop a battery charging station for autonomous mobile work machines. For this purpose, the functionality of drive FCs was expanded to the function of fast charging according to a given charging strategy. Battery charging with a current of 1C (the value of the charging current resulting from the battery capacity specified in Ah, e.g. 200 Ah means 1C = 200 A), according to the authors, it means fast charging, where the battery is charged in 1 h. While charging with 3C or higher current is ultra (super) fast charging, then the battery is charged in 20 min (GW 2020).
The paper proposes the use of 6-diode rectification to obtain a constant voltage of battery charging, attaching to the PWM inverter of drive FC. During battery charging, the drive converter increases the basic harmonic's frequency of the rectified three-phase voltage, e.g. to 500 Hz, to minimize the alternating components in the rectified voltage. To ensure constant current of battery charging, the inverter control system sets the appropriate PWM modulation factor value and thereby controls the basic harmonic's effective value of the rectified voltage.
The paper proposes the use of power integrated circuits used in drive FC to develop a DC/AC/DC voltage converter for fast and ultra-fast charging of EV batteries. The proposed solution allows the supply of DC energy to recharge the battery directly to the distributed charging places of working machines' batteries. Lack of side disorders in the PWM modulation of the inverter – Differential-Mode (DM) and Common-Mode (CM) voltages caused by rectifying the AC voltage in the built-in rectifier in the integrated circuit—allows the distribution of DC energy through cable carts or dedicated DC voltage lines to distant charging stations for work machines' batteries.
The paper is organized as follows: Sects. 2 and 3 describe respectively the local DC microgrid in the industrial plant and the integrated circuits in drive FCs to modifying and implementing in EV battery charging stations. Sections 4 and 5 describe respectively the Li-ion battery set with DC/DC converter and usage of drive FCs as a DC/AC/DC converter for fast charging of EV batteries. Sections 5 and 6 provides the simulation results and the experimental tests of DC/AC/DC converter. The concluding remarks are given in Sect. 7.
2 Local industrial 600 V DC microgrid
A 600 V DC network was proposed, because it is possible to supply this voltage directly to the DC circuits of low-voltage drive FCs. It was assumed that the industrial plant's AC power grid has the parameters of 3 × 400 V/50 Hz. Other voltage levels require additional conversion. It is possible to use the proposed solution in other microgrids, e.g. AC or with other DC voltage levels.
Fast battery charging systems for autonomous electric work machines should be integrated with industrial power networks in such a way as not to increase the electricity demand of the power system. This can be achieved by using additional renewable energy sources and energy storage (Marra 2013). Hybrid microgrids of DC voltage provide the possibility of obtaining additional energy. Figure 1 shows a local 600 V DC microgrid attached to the intermediate circuits of voltage FCs, which has the following properties (Danfoss 2020; Marra 2013):
-
relieves the power system and thus enables the improvement of energy quality indicators,
-
enables energy flow between drive frequency converters, which eliminates the need for power resistors (braking resistors) to precipitate excess energy when the induction motors are working as the generators,
-
enables the use of energy storages,
-
enables the use of the existing power supply system and protections of drive frequency converters to supply fast and ultra-fast converters for EV batteries charging,
-
provides the possibility of locating charging stations near drive frequency converters so that the charging stations can be located near the places of use of electric work machines (tractors, conveyors, bulldozers, etc.).

Industrial hybrid 600 V DC microgrid to power drive FCs and EV battery charging converters
The ability to use a drive FC as a converter for fast battery charging is the main purpose of this article. Drive FCs provide controlling of effective value and frequency of the motor stator phase-to-phase voltage. The voltage value is controlled by the PWM inverter modulation factor and the motor shaft speed is frequency dependent (Danfoss 2016).
Drive FCs can power drive sets in which some of them work as generators. Figure 2 shows a multi-engine power set in which one of the engines is an energy generator.

Multi-motor converter drive with a motor in the generator state driven by a work machine
During engine braking, its shaft can be driven by the energy of a work machine, e.g. when braking a large inertial mass (Danfoss 2020). When the motor is an AC voltage energy generator, then the inverter converts the energy into DC voltage and delivers it to the 600 V DC micro grid. As a consequence, there is no need to disperse this energy onto the braking resistors, which increases the efficiency of the multi-motor drive system, Fig. 2.
3 Integrated circuits in drive FCs
Power integrated circuits for usage in the low-voltage drive FCs typically contain a 6-diode rectifier and a two-level inverter with power up to approx. 50 kW in single chip (Danfoss 2016). Otherwise, the individual AD/DC (rectifier) and DC/AC (inverter) converters are placed in the separate chips (Fuji Electric 2020; Semix 2020).
Power circuits of drive FCs are currently being built using power integrated circuits. An example of the construction of the power circuit for the FC of synchronous and asynchronous motors is shown in Fig. 3. The integrated circuit contains the converters making up the AC/DC/AC drive converter: three-phase AC/DC diode rectifier, brake chopper to control the resistor current of brake chopper to control the resistor current of excess energy discharge to protect excessive growth of voltage on the capacitors bank of a DC/DC drive FC and a three-phase DC/AC half-bridge two-level PWM inverter. A three-phase inverter (Fig. 3) with 1200 V/100A parameters can be used to build a drive FC for an induction motor (or PMSM) of power up to approx. 50 kW assuming a 3 × 400 V/50 Hz supply voltage.

Schematic diagram of a power integrated circuit including a rectifier and an 100A/1200 V two-level inverter (Fuji Electric 2020)
The control of drive FC is carried out using the description of voltage, current or magnetic flux spatial vector control in signal processors. Induction/synchronous motor speed can be controlled by using changing the frequency of the inverter. The motor control can be done by TMS320F2812 DSP Controller, Fig. 4. This controller is used to generate the PWM pulses (DSP 2020).

Realization in the DSP TMS320F2812 of space oriented flux vector (FOC) control method of PMSM drive converter
4 Charging high capacity and big power Ev batteries
For the Li-ion type LFP200AHA battery cell (GW 2020) with the following parameters: Vbn = 3.2 V (from 20 to 100% SOC—State Of Charge) and Qno = 200 Ah, it is possible to build a battery pack by connecting cells in series to determine the voltage of the battery set and in parallel to increase the capacity of the set.
With a series connection of 100 cells, a set of 100 cells multiplied by 3.2 V is obtained, giving the nominal voltage of the battery set equal to Vzbn = 320 V and capacity Qzbn1 = 200 Ah. By connecting 4 chains of 100 cells in parallel, the final battery set 100c4ch with the parameters 800Ah/320 V is get, which gives the 256kWh capacity of this set. An equivalent diagram of an EV battery with a DC/DC charging converter is shown in Fig. 5.

According to Fig. 5, a DC/DC converter with a minimum power of approx. P (1C) = 282 kW should be used to charge the battery set in 1 h with 1C current or with a power of 846 kW to charge the battery in about 20 min. with 3C current. The possibility to charge an EV battery with 3C current depends on its cooling capability, as the losses during charging (Ps = Rzb⋅Izb2) increase three times to 3 × 5 kW = 15 kW. During continuous operation and while charging the battery, its temperature may not exceed 65 °C (GW 2020).
Different strategies are used to charge EV batteries, e.g. Constant Current (CC) 3C (20–80% SOC) and Constant Voltage (CV) 80–100% SOC or charging with 10C current pulse (20–80% SOC). A compromise should be found between charging time and battery temperature.
The equivalent internal resistance Rzb of the battery pack intended to estimate charging power loses, can be determined based on the equivalent resistance of a single cell Rb. Several methods for determining Rb are known (Marra et al. 2012). The authors of this paper propose a method based on reading the cell charging voltage value at 1C and 3C charging currents, which is given in the catalogue card (Danfoss 2016; Fuji Electric 2020). Charging voltages for the Li-ion cells of the LFP200AHA type are linearly approximated and presented in Fig. 6.

Linear approximated Li-ion cell voltages of the LFP200AHA type for the 20%-100% SOC range when charged at 1C and 3C
Based on the reading voltages for 50% SOC, from Fig. 6 the equivalent internal resistance Rb of the single cell can be calculated (1):
where:
Rb—equivalent resistance of a single cell,
ΔUb—difference of cell voltages for 3C and 1C charging currents,
ΔIb—difference of cell charging currents 3C (600A) and 1C (200A), respectively.
Then the equivalent resistance Rzb of the 100c4ch battery set is equal to (2):
5 Drive Fcs as Dc/Ac/Dc converters for fast battery charging
Drive FCs are commonly used in the industrial drives for AC motors. The authors examined the possibility of their application for fast charging of EV batteries in mobile work machines. In Fig. 7 the main components of the AC/DC/AC industrial converter for controlling the torque and speed of the drive shaft of AC motors is presented. The drive FC can be powered from a three-phase AC network or a 600 V DC microgrid (Fig. 1) (Danfoss 2020). When powering the FC from a DC microgrid, the input diode rectifier is not used. It can be used to rectify the AC voltage produced by the PWM inverter and charge the EV battery with regulated DC voltage. Controlling the PWM modulation factor value provides the possibility of obtaining DC voltage less than the DC microgrid voltage. Adjusting the value of the rectified voltage allows the implementation of the strategy of CC and CV battery charging or pulse charging (Collin et al. 2019).

The drive FC powered from the DC 600 V microgrid serving two functions: motor power supplying (S55 contactor switched-on) and fast EV battery charging
As shown in Fig. 7, the use of a rectifier to rectify the voltage of the PWM inverter does not create additional costs for designing an EV fast charging station. The efficiency of the DC/AC/DC converter charging an EV battery is not tested here. Nevertheless, it should be expected that it can be even higher compared to the AC/DC/AC drive converter supplying the motor, as there is no loss on the inverter's freewheeling diodes during battery charging. There is no reactive current component during battery charging, that why inverter's freewheeling diodes are not used here. The motor contains the current reactive component (freewheeling diodes current) of the inverter and the active component (current of the inverter power transistors). The reactive component of the induction motor's current builds a magnetic flux coupling the magnetic field generated in the stator with the magnetic field generated in the motor rotor.
6 Simulation tests of the model of DC/AC/DC converter for EV battery charging
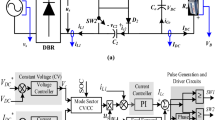
To check the possibility of using the components of the drive FC to create a DC/AC/DC converter supplying an EV battery by DC voltage, the model shown in Fig. 8 was built. A PWM inverter is supplied from a 600 V DC voltage network with a measuring system for analyzing the phase voltage UP, phase-to-phase voltage UPP and inverter CM voltage. The diode rectifier is loaded with EV battery 200Ah/320 V/64kWh and CM voltage is measuring after the rectifier V2.

The DC/AC/DC converter model for fast charging of EV batteries
The DC/AC/DC converter can be created using power integrated circuits with the structure shown in Fig. 3. The inverter from Fig. 8 performs sinusoidal PWM modulation, where the frequency of the modulating sinusoid is fs = 500 Hz and the frequency of the triangular carrier wave fo = 10 × 500 Hz = 5 kHz. The model of control panel is shown in Fig. 9.

Graph of control states of the inverter of a DC/AC/DC converter model from Fig. 8a for PWM sinusoidal modulation
In the simulation tests of the DC/AC/DC converter model, selected converter voltages and currents were tested while charging the EV battery.
Adjusting the modulation factor M ensures the constant current charging of the EV battery. The rectified voltage VB (Fig. 8) also depends on this factor. With the battery charging current AM2 = 200A, M = 7.1 (Fig. 10b), the battery charging voltage VB = 328 V was obtained. Increasing the frequency of the three-phase PWM wave output voltage to 500 Hz provides a negligible small share of the alternating component in the rectified voltage of battery charging.

Selected voltages and current of EV battery charging in simulation tests of the DC/AC/DC converter model: a inverter control voltage, where M = 7.1, b DC voltage V1, VB, EVB and battery charging current AM2 (according to Fig. 8b)
Figure 11 shows the CM voltage curve of the PWM inverter and its amplitude spectrum with a modulation factor.

CM voltage of PWM inverter:a waveform, b amplitude spectrum with sinusoidal modulation and modulation factor M = 7.1
M = 7.1 (Fig. 9). The amplitude spectrum presented in Fig. 11b contains low order harmonics of CM voltage. At M close to zero, the CM voltage has a waveform close to a square wave (Szymanski et al. 2020; Kempski and Smolenski 2006). Therefore, capacitive ground leakage currents may occur. Placing the inverter and rectifier in the one integrated circuit will significantly reduce the parasitic ground capacities and thereby reduce the parasitic ground leakage currents.
The EV battery charging points can be located away from drive FCs. When using the rectifier away from the inverter, techniques that minimize the effects of CM voltage should be used. That issue is discussed in (Szymanski et al. 2020; Pairodamonchai and Sangwongwanich 2011; Szymanski and Zurek-Mortka 2020).
7 Laboratory tests of the Dc/Ac/Dc converter for Ev battery charging
To confirm the simulation tests, a DC/AC/DC converter was built using a drive FC with a 6-diode rectifier connected to the PWM inverter. The 3 kW/3 × 400 V/50 Hz low voltage drive FC was driven according to the settings: f0 = 5 kHz, fs = 500 Hz, IAC-lim = 4A. The rectifier was loaded with resistance enabling it to exceed the inverter load current set. The inverter of the drive FC automatically reduced the modulation factor M and thus stabilized the current at the setpoint IAC-lim = 4A by matching the rectified voltage.
Figure 12a shows the programmed current value, IAC-lim = 4A, which is maintained during the battery charging by the inverter. Figure 12b shows a drive FC outputs (5) connected to a fast 6-diode rectifier (3) with DC chokes and capacitors on the constant voltage side (2) of the rectifier. The experimental results from Fig. 13a and b was measured by current probe (4).

Drive FC as a DC/AC/DC converter for charging EV batteries with DC: a the output current value programmed in the drive FC, b fast 6-diode rectifier for rectifying the three-phase voltage of the PWM inverter with a 500 Hz basic harmonic and a 5 kHz carrier frequency

Voltage and current of the DC/AC/DC converter rectification load from Fig. 12 for various load resistances: a maximum rectifier output voltage 500 V at stabilized current at IDC = 5.5A, Rload = 91Ω, b reduced rectified voltage to 320 V with reduced load resistance to 58Ω, IDC = 5.5A
Figure 13a shows that at a given current value of IAC-lim = 4A in the drive FC, on the constant voltage side of rectification, the maximum IDC = 5.5A current can be maintained with load resistances lower than 91Ω, by automatic adjustment of the effective value of the basic harmonic of the inverter phase-to-phase voltage. Figure 13b shows that the current limit is still maintained at the expense of reducing the voltage to value 320 V. The experiment confirmed the results of simulation tests.
8 Conclusion
The extension of drive FCs to the additional battery charging functionality of EVs and mobile electric work machines allows the distribution of battery charging stations, especially in the industrialized areas. Existing converter electric drives can be adapted for battery charging. Drive FCs for controlling induction motors are today devices using integrated circuits for the construction of power circuits and control circuits. They are commonly used in the industrial drives of induction motors. The widespread occurrence of drive FCs prompted the authors to modify them for the needs of fast and ultra-fast charging stations for EV batteries.
Summing up the conducted simulation research, it should be stated that it is possible to build a high-efficiency DC/AC/DC converter for EV fast and ultra-fast charging based on drive FCs. Using the drive converter power supply system and the converter itself to create an EV battery charging station does not cause large costs.
This paper demonstrates the possibility of adapting drive FCs to the needs of EV batteries charging. After using a rectifier attached to the drive inverter, a DC voltage source with adjustable value was obtained in such a way that a constant current of battery charging was ensured. The software functions of drive FCs are used here to shape the inverter voltage characteristics and thus the value and quality of the rectified voltage. The use of rectification and inverter implemented in the one power integrated circuit eliminates the negative side effects of the inverter CM voltage.
References
Anseán D, García VM et al (2009) Electric vehicle li–ion battery evaluation based on internal resistance analysis. World Electric Veh J. https://doi.org/10.1109/VPPC.2014.7007058
Collin R et al (2019) Advanced electric vehicle fast-charging technologies. Energies 12:1839. https://doi.org/10.3390/en12101839
Danfoss (2016) Danfoss technical note. VLT high power drives to fit your application. Selection Guide. DKDD.PB.404.A4.22. http://files.danfoss.com/download. Accessed 1 July 2020
Danfoss (2002) Danfoss technical note. Load sharing. MI.50.N2.02. http://files.danfoss.com. Accessed 7 July 2020
DSP (2020) TI, MCK2812 DSP motion control kits. https://www.ict.com.tw
Fuji Electric (2020) Data sheet of power circuit: 7MBR100VX120-50. https://www.fujielectric.com
GW (2020) Battery cell technical specification, Winston LFP200AHA Cell. www.gwl.eu
Kempski A, Smolenski R (2006) Decomposition of EMI noise into common and differential modes in PWM inverter drive system. Electr Power Qual Util J 12(1):53–58
Marra F (2013) Electric vehicles integration in the electric power system with intermittent energy sources. The charge/discharge infrastructure, PhD Thesis.
Marra F, Yang GY, Træholt C, Larsen E, Rasmussen CN, You S (2012) Demand profile study of battery electric vehicle under different charging options. Proc IEEE Power Energy Soc Gener Meet. https://doi.org/10.1109/PESGM.2012.6345063
Pairodamonchai P, Sangwongwanich S (2011) Exact common-mode and differential-mode equivalent circuits of inverters in motor drive systems taking into account input rectifiers. IEEE Int Conf Power Electron Drive Syst. https://doi.org/10.1109/PEDS.2011.6147259 (ISSN: 2164-5256)
Semix (2020) Data Sheet of Power Circuit: SEMiX703GD126HDc. https://www.semikron.com
Szymanski J, Zurek-Mortka M (2020) Mitigation methods of voltage disturbances and harmonic currents of pwm two-level inverter supplying the 6-pulse diode rectifier. Adv Sci Technol Eng Syst J 5(1):294–301. https://doi.org/10.25046/aj050
Szymanski J, Zurek-Mortka M, Sadhu PK, Goswami A (2020) Mitigation methods of ground leakage current caused by common-mode in voltage frequency drives, energy systems, drives and automations. Springer, Berlin, pp 1–10
Acknowledgement
In the part of the article related to the modelling of the electric circuit, the ANSYS Software national scientific software license has been used, which was funded by a computational grant obtained by Kazimierz Pulaski University of Technology and Humanities in Radom, Poland.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Szymanski, J.R., Zurek-Mortka, M. & Acharjee, D. Unidirectional voltage converter for battery electric vehicle ultrafast charger. Microsyst Technol 27, 2865–2872 (2021). https://doi.org/10.1007/s00542-020-05038-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-05038-7