
Abstract
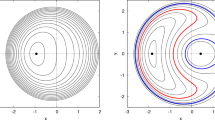
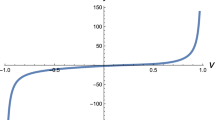
The paper considers planar motion of a three-body tethered system whose center of mass moves in a circular orbit around the Earth. The equilibrium configurations of the system and their stability are examined and contrasted with those of the classical circular restricted three-body problem. It is observed that there are four classes of equilibrium configurations of tethered three-body systems: in two of them the bodies are collinear, while in the other two, the bodies lie in a triangular configuration. Analysis of the stability of these equilibrium configurations shows that the triangular configurations are unstable, while one of the collinear configurations (the one along the local vertical) is stable. An integral of motion is obtained, which turns out to be the Hamiltonian of the system per unit mass. The zero-velocity curves based on this Hamiltonian are presented.
Similar content being viewed by others

References
PENZO, P. A. and AMMANN, P. W. Tethers in Space Handbook, 2nd Edition, NASA Office of Space Flight, Washington, D.C., May 1989.
LORENZINI, E. C. “A Three-Mass Tethered System for Micro-g/Variable-g Applications,” Journal of Guidance, Control, and Dynamics, Vol. 10, 1987, pp. 242–249.
MISRA, A. K., AMIER, Z. E. and MODI, V. J. “Attitude Dynamics of Three-Body Tethered Systems,” Acta Astronautica, Vol. 17, No. 10, 1988, pp. 1059–1068.
COSMO, M., LORENZINI, E. C., VETRELLA, S. and MOCCIA, A. “Transient Dynamics of the Tether Elevator/Crawler System,” Proceedings of the AIAA/AAS Astrodynamics Conference, Minneapolis, Minn., August 15–17, 1988, pp. 480–489.
MISRA, A. K. and MODI, V. J. “Three-Dimensional Dynamics and Control of Tether-Connected N-Body Systems,” Acta Astronautica, Vol. 26, No. 2, 1992, pp. 77–84.
KESHMIRI, M., MISRA, A. K. and MODI, V. J. “General Formulation for N-Body Tethered Satellite System Dynamics,” Journal of Guidance, Control, and Dynamics, Vol. 19, No. 1, 1996, pp. 75–83.
SZEBEHELY, V. Theory of Orbits, The Restricted Problem of Three Bodies, New York: Academic Press, 1967.
MEIROVITCH, L. Introduction to Dynamics and Control, New York: Wiley, 1985.
Author information
Authors and Affiliations
Rights and permissions
About this article

Cite this article
Misra, A.K. Equilibrium Configurations of Tethered Three-Body Systems and Their Stability. J of Astronaut Sci 50, 241–253 (2002). https://doi.org/10.1007/BF03546250
Published:
Issue Date:
DOI: https://doi.org/10.1007/BF03546250