
Abstract
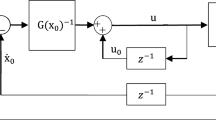
By using the Extended Kalman Filter an accurate path following in turbulent air is performed. The procedure employs simultaneously two different EKFs: the first one estimates disturbances, the second one affords to determine the necessary controls displacements for rejecting those ones. To tune the EKFs an optimization algorithm has been designed to automatically determine Process Noise Covariance and Measurement Noise Covariance matrices. The first filter, by using instrumental measurements gathered in turbulent air, estimates wind components. The second one obtains command laws able to follow the desired flight path. To perform this task aerodynamic coefficients have been modified. Such a procedure leads to a set of unknown stability and control parameters containing the required displacements of the controls. The filter estimates the new set of aircraft stability derivatives by using measurements made by the desired flight path parameters. Once the unknown stability and control derivatives have been determined, the obtained control displacements are used to perform an accurate path following in turbulent air. The obtained control laws are adaptive and they depend by either the characteristics of the disturbance or the desired flight path. The proposed algorithm, using appropriate imposed constrains, permits to tune the filter without trial and error procedure.
Similar content being viewed by others

References
K. Mitsutake, S. Higashino, “Evaluation of an A*-EC Hybrid Path Planning Method for UAVs Using Real-Time Hardware-in-the-Loop Simulation”, International Review of Aerospace Engineering (IREASE), Vol. 6 (1) (2013), pp. 40–47
K. Sigurd, J. How, “UAV Trajectory Design using Total field Collision Avoidance”, Proceeding of AIAA Guidance, navigation and Control Conference and Exhibit (2013), Austin, TX, USA (2013)
J. Wilburn, M. Perhinschi, B. Wilburn, “Enhanced Modified Voronoi Algorithm for UAV path planning and Obstacle Avoidance, International Review of Aerospace Engineering (IREASE), Vol. 6 (1) (2013), pp. 1–9
K. Bousson, T. Gameiro, “A Quintic Spline Approach to 4D Trajectory Generation for Unmanned Aerial Vehicles”, International Review of Aerospace Engineering (IREASE), Vol. 8 (1) (2015), pp. 1–9
H. Benzerrouk, H. Salhi, A. Nebylov, “Non-Gaussian sensor fusion analysis with Gaussian Mixture and Adaptive Based Cubature Kalman filtering for Unmanned Aerial Vehicle”, International Review of Aerospace Engineering (IREASE), Vol. 6 (6) (2013), pp. 264–277
D. Nelson, D. Barber, T. McLain, R. Beard, “Vector fiels path following for miniature air vehicles”, IEEE T on Robotics 23(3): 519–529 (2007)
A. Brezoescu, T. Espinoza, P. Castillo, R. Lozano, “Adaptive Trajectory Following for a Fixed-Wing UAV in Presence of Crosswind”, Journal of Intelligent Robot System 69: 257–271 (2013)
C. Liu, O. McAree, W. H. Chen, “Path Following Control for Small fixed-wing unmanned aerial vehicles under wind disturbances”, International Journal of Robust and Nonlinear Control 23: 1682–1698 (2013)
J. Smith, J. Su, C. Liu, W. H. Chen, “Disturbance Observer Based Control with Anti-Windup Applied to a Small Fixed-Wing UAV for Disturbance Rejection”, Journal of Intelligent Robot System DOI 10.1007/s10846-017-0534-5 (2017)
C. Liu, W. H. Chen, “Disturbance Rejection Flight Control for Small Fixed-Wing Unmanned Aerial Vehicles”, Journal of Guidance, Control and Dynamics 39 (12): 2804–2813 (2016)
C. Grillo, F. Montano, “An EKF based method for path following in turbulent air”, International Review of Aerospace Engineering (IREASE) 10 (1): 1–6 (2017)
G. Welch, G. Bishop, ”An Introduction to the Kalman Filter”, TR 95041, Department of Computer Science, University of North Carolina at Chapel Hill, 2004
B. Etkin, ”Dynamics of Atmospheric Flight”, John Whiley and Sons, New York, 1972
Author information
Authors and Affiliations
Rights and permissions
About this article

Cite this article
Grillo, C., Montano, F. Optimal Flight Path Determination in Turbulent Air: A Modified EKF Approach. Aerotec. Missili Spaz. 96, 216–222 (2017). https://doi.org/10.1007/BF03404756
Published:
Issue Date:
DOI: https://doi.org/10.1007/BF03404756