
Abstract
A robust control design scheme using well-developed SISO techniques is proposed for maglev vehicles that are inherently unstable MIMO systems. The proposed seperate control method has basically two control loops: a stabilizing loop by a pole-placement technique, and a performance loop using a novel optimal LQ loop-shaping technique. This paper shows that the coupling terms involved in maglev vehicles with multimagnets should not be neglected but compensated for their stability and performance robustness. The robustness properties of the proposed control system are then evaluated under variations of vehicle masses and air gaps through a computer simulation. This paper also describes the reason why the proposed control technique can be suggested as a tool using only SISO techniques in controlling unstable MIMO systems such as maglev vehicles.
Similar content being viewed by others


Abbreviations
- f i :
-
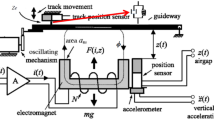
Magnetic force in thei th corner of maglev vehicles
- z i :
-
Air gap in thei th corner of maglev vehicles
- z g ,zθ, andzϕ:
-
Air gaps with respect to heave, pitch, and roll
- \(\ddot z\),\(\ddot \theta \), and\(\ddot \phi \):
-
Accelerations with respect to heave, pitch, and roll
- F z :
-
Total magnetic force for heave direction
- T θ :
-
Torque for pitch direction
- T p :
-
Torque for roll direction
- M :
-
Total mass of maglev vehicles
- Iθ andIϕ:
-
Inertial moments about pitch and roll axes
- l andb:
-
Half length and width of maglev vehicles
- K z :
-
Circuit constant with respect to air gap
- K I :
-
Circuit constant with respect to current
- R i :
-
Resistance of thei th circuit transducer
- N :
-
Number of turns
- z0,y0, andI0:
-
Nominal values with respect to heave, guidance, and current
- |C ij |:
-
Coupling matrix of maglev vehicles
- {f ext (t)}:
-
Disturbance vector
- A ü :
-
System matrix for local control system
- A ij :
-
System matrix imposed by coupling terms
- b i :
-
Input vector
- Γ i :
-
Disturbance input matrix
- u l i (t) :
-
Local control law
- u c i (t) :
-
Complementary control law
- U p (t) :
-
Actual control law for a given plant
- G :
-
Optimal LQ loop-shaping control gain
- K :
-
Pole-placement control gain
- L :
-
Loop-shaping design parameter
- ϱ:
-
Scaling design parameter
- G F (S) :
-
Loop transfer function for a given plant
- Φ(S):
-
State transition function for a given plant
References
Bryson, A. E. and Ho, Y. C., 1975,Applied Optimal Control, Hemisphere Pub. Co.
Doyle, J. C. and Stein, G., 1981, “Multivariable Feedback Design: Concepts for a Classical/Modern Synthesis,”IEEE Trans. on AC, Vol. 26, pp. 4–16.
Fabien, B. C., 1993, “Controller Gain Selection for an Electromagnetic Suspension Under Random Excitation,”ASME J. of Dyn. Sys. Meas. and Control, Vol. 115, pp. 156–165.
Fallside, F., 1977,Control System Design by Pole-Zero Assignment, Academic Press.
Kim, J. S., 1987, “Nonlinear Multivariable Control Using Statistical Linearization and Loop Transfer Recovery,” Ph. D. Thesis, Dept of Mech. Eng., MIT.
Lehtomaki, N. A., 1981, “Practical Robustness Measures in Multivariable Control System Analysis,” Ph. D. Thesis, Dept. of EECS, MIT.
Limbert, D. A., Richardson, H. H., and Wormley, D. N., 1979, “Controlled Dynamic Characteristics of Ferromagnetic Vehicle Suspension Providing Simultaneous Lift and Guidance,”ASME J. of Dyn. Sys. Meas. and Control, pp. 217–222.
Kim, J. S. and Park, J. S., 1991, “Bond Graph Modeling and LQG/LTR Controller Design of Magnetically Levitation Systems,”Trans. of KSME, Vol. 15, pp. 1620–1634.
MacLeod, C. and Goodall, R. M., 1996, “Frequency-Shaping LQ Control of Maglev Suspension Systems for Optimal Performance with Deterministic and Stochastic Inputs,”IEEE Proc. on Control Theory Appl., Vol. 143, pp. 25–30.
Sinha, P. K., 1987,Electromagnetic Suspension: Dynamic and Control, Peter Peregrinus Ltd.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Park, J.S., Kim, J.S. & Lee, J.K. Robust control of maglev vehicles with multimagnets using separate control techniques. KSME International Journal 15, 1240–1247 (2001). https://doi.org/10.1007/BF03185664
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF03185664