
Abstract
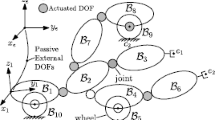
A numerical method is presented for the dynamic analysis of military tracked vehicles of high mobility. To compute the impulsive dynamic contact forces which occur when a vehicle passes on a ground obstacle, the track is modeled as the combination of elastic links interconected by pin joints. The mass of each track link, the elastic elongation of a track link between pin joints by the track tension, and the elastic spring effects on the upper and lower surfaces of each track link have been considered in the equations of motion. And the chassis, torsion bar arms, and road wheels of the vehicle are modeled as the rigid multibodies connected with kinematic constraints. The contact positions and the contact forces between the road wheels and track, and the ground and the the track are simultaneously computed with the solution of the equations of motions of the vehicle consisting of the multibodies. The iterative scheme for the solution of the multibody dynamics of the tracked vehicle is presented and the numerical simulations are conducted.
Similar content being viewed by others

References
Addison, C. A., Enright, W. H., Gaffney, P. W., Gladwell, I., and Hanson, P. M., 1991, “Algorithm 687-A Decision Tree for the Numerical Solution of Initial Value Ordinary Differential Equations,”ACM Transactions on Mathematical Software, Vol. 17, pp. 1–10.
Cash, J. R. and Karp, A. H., 1990, “A Variable Order Runge-Kutta Method for Initial Value Problems with Rapidly Varying Right-Hand Sides,”ACM Transactions on Mathematical Software, Vol. 16, pp. 201–222.
Garcia de Jalon, J. and Bayo, E., 1994,Kinematic and Dynamic Simulation of Multibody Systems, Springer-verlag, New York.
Hairer, E., Norsett, S. P., and Wanner, G., 1987,Solving Ordinary Differential Equations 1, Springer-verlag, Berlin Heidelberg.
Lee, K., 1993, “An Accelerated Iterative Method for the Dynamics of Constrained Multibody Systems,”Computational Mechanics, Vol. 12., pp. 27–38.
Lee, K., 1997, “A Numerical Method for Dynamic Analysis of Vehicles Moving on Flexible Structures Having Gaps,”International Journal for Numerical Methods in Engineering, 40, pp. 511–531.
Lee, K., 1989, “An Accelerated Iterative Method for Contact Analysis,”International Journal for Numerical Methods Engineering, 28, pp. 279–293.
McCullough, M. K. and Haug, E. J., 1986, “Dynamics of High Mobility Track Vehicles,”ASME J. Mechanisms Transmissions, and Automation in Design, Vol. 108, pp. 189–196.
Nakanishi, T. and Shabana, A. A., 1994, “Contact Forces in the Non-linear Dynamic Analysis of Tracked Vehicles,”International Journal for Numerical Methods Engineering, Vol. 37. pp. 1251–1275.
Vu-Quoc, L. and Olsson, M., 1989, “A Conputational Procedure for Intercation of High-Speed Vehicles on Flexible Structures Without Assuming Known Vehicle Nominal Motion,” “Computer Methods in Applied Mechanics and Engineering, Vol. 76, pp. 207–244.
Vu-Quoc, L. and Olsson, M., 1989, “Formulation of a Basic Building Block Model for Interaction of High-Speed Vehicles on Flexible Structures,”ASME Journal of Applied Mechanics, Vol. 56, pp. 451–458.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lee, K. A numerical method for dynamic analysis of tracked vehicles of high mobility. KSME International Journal 14, 1028–1040 (2000). https://doi.org/10.1007/BF03185057
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF03185057