
Abstract
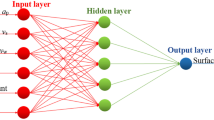
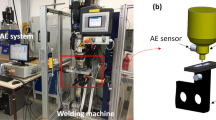
The focus of this study is the development of a credible fault detection system of the cylindrical plunge grinding process. The acoustic emission (AE) signals generated during machining were analyzed to determine the relationship between grinding-related faults and characteristics of changes in signals. Furthermore, a neural network, which has excellent ability in pattern classification, was applied to the diagnosis system. The neural network was optimized with a momentum coefficient, a learning rate, and a structure of the hidden layer in the iterative learning process. The success rates of fault detection were verified.
Similar content being viewed by others

References
Bruck, J. and Goodman, W., 1988, “A Generalized Convergence Theorem for Neural Networks,”IEEE Trans. Inform. Theory, Vol. 34, pp. 1089–1029.
Dornfeld, D. and Cai, He Gao, 1984, “An Investigation of Grinding and Wheel Loading Using Acoustic Emission,”Transactions of the ASME, Vol. 106, No. 2, pp. 28–33.
Emel, E. and Asibu, E. K., 1988, “Tool Failure Monitoring in Turning by Patterning Recognition Analysis of AE Signals,”Transactions of the ASME, Vol. 110, No. 5, pp. 137–145.
Freeman, J. A. and Skapura, D. M., 1991,:Neural Networks-Algorithms, Applications, and Programming Techniques, Addison-Wesley Publishing Company, New York.
Kawamura, Suehisa and Mitsuhashi, Michio, 1981, “Studies on the Fundamental of Grinding Burn (3rd Report) Oxidation Rate Raw of Workpiece,”Journal of the Japanese Society of Precision Engineering, Vol. 47, No. 9, pp. 106–111.
Kim, G. H., Inasaki, I. and Lee, J. K., 1994, “Architecture of Knowledge-Base and Management System for Grinding Operations,”Journal of the Korean Society of Precision Engineering, Vol. 11, No. 1, pp. 211–218.
König, W., Altintas, Y. and Memis, F., 1995, “Direct Adaptive Control of Plunge Grinding Process Using Acoustic Emission Sensor,”The International Journal of Machine Tools and Manufacture, Vol. 35, No. 10, pp. 1445–1457.
Liao, Y. S. and Shiang, L. C., 1991, “Computer Simulation of Self-Excited and Forced Vibtarions in the External Cylindrical Plunge Grinding Process,”Transactions of the ASME, Vol. 113, No. 8, pp. 297–304.
Lindsay, P. and Hahn, S., 1971, “On the Basic Relationships between Grinding Parameters,”Annals of the CIRP, Vol. 20, No. 5, pp. 657–671.
Malkin, S., 1989,Grinding Technology-Theory and Applications of Machining with Abrasives, John Wiley & Sons, New York.
Wakuda, M., Inasaki, I., Ogawa, K. and Takahara, M., 1993, “Monitroing of the Grinding Process with an AE Sensor Integrated CBN Wheel,”Journal of the Japanese Society of the Precision Engineering, Vol. 59, No. 2, pp. 97–102.
White, H., 1989, “Learning in Artificial Neural Networks,”Neural Computation, Vol. 1, pp. 425–464.
Widrow, B., et al., 1975, “Adaptive Noise Cancelling: Principles and Applications,”Proc. IEEE, Vol. 63, pp. 1692–1716.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kwak, JS., Song, JB. Fault detection of the cylindrical plunge grinding process by using the parameters of AE signals. KSME International Journal 14, 773–781 (2000). https://doi.org/10.1007/BF03184463
Received:
Revised:
Issue Date:
DOI: https://doi.org/10.1007/BF03184463