
Abstract
This paper presents the mathematical modeling, guidance and robust control synthesis of a highly maneuverable submersible vehicle (or underwater vehicle) when performing a specific mission at shallow submergence conditions. First, the vertical plane motions (heave and pitch) of the vehicle are modeled by a set of maneuvering equations. After model simplification, a state-space model is compactly obtained. Then a state-feedback controller is proposed for the accurate depth-keeping and pitch motion controls of the vehicle. The control actions to the generalized plant can be provided by the mixedH 2/H ∞ optimal synthesis as well as closed-loop pole constraint with LMIs. The feasibility of the guidance and control approach is verified with direct numerical simulations. The proposed approach ensures reasonable depth-keeping and minimal pitch motions, even under a given uncertainty condition.
Similar content being viewed by others

Abbreviations
- I n 0 n×m :
-
n×n identity matrix, n×m null matrix
- R + :
-
set of positive real numbers in [0, ∞] with real fieldR
- A, B :
-
system matrix, (control or disturbance) input matrix
- C, D :
-
output matrix, (control or disturbance) input matrix
- \(J_{\bar y} \) :
-
pitch moment of inertia about\(\bar y - body\) axis
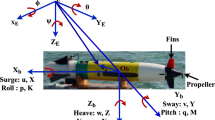
- U :
-
surge rate (forward speed) along with the axis\(\bar x\)
- ω:
-
heave rate (vertical speed) along with the axis\(\bar z\)
- θ,q :
-
pitch angle, pitch angular velocity
- y :
-
measured output vector
- \((\bar x_B ,\bar z_B )\) :
-
coordinates of the center of buoyancy in the body frame
- \((\bar x_G ,\bar z_G )\) :
-
coordinates of the c. g. in the body frame
- m v ,W B ,W W :
-
vehicle mass, buoyancy, weight
- ρ:
-
fluid density
- Z ∞,Z 2 :
-
vectors of performance outputs of interest
- A>0(A<0):
-
positive-definite (negative-definite) matrix
-
 :
: -
state-space realization of the transfer matrixC(s(I−A) −1 B=D
- \(\bar \omega \) :
-
angular frequency
- \(\left\| w \right\|_2 = (\int_0^\infty {w^T wdt} )^{1/2}< \infty \) :
-
theL 2 (energy) norm of the vector of signalsw (t)
- \(\left\| {A(s)} \right\|_\infty = \mathop {\sup }\limits_{0< \varpi< \infty } \bar \sigma [A(j\bar \omega )]\) :
-
H∞ norm of the stable transfer function matrixA (s)
- \(\left\| {A(s)} \right\|_2 = \{ (1/2 \pi ) \int_{ - \infty }^\infty {{\rm T}race} [A^ * (j\bar \omega ) A (j\bar \omega ) d\bar \omega ]\} ^{1/2} \) :
-
H 2 norm of the matrixA(s)
- \(\sigma (A)\) :
-
largest (or maximum) singular value ofA
- \((\tilde \circ )\) :
-
normalized version of variable (o)
 :
:References
Bernstein, D. D., Haddad, W. H., and Mustafa, D., 1991, “MixedH 2/H ∞ Regulation and Estimation: the Discrete-Time Case,”Syst. Contr. Letters, Vol. 16, pp. 235–247.
Boyd, S., Ghaoui, L. E., Feron, E. and Balakrishan, V., 1994,Linear Matrix Inequalities in System and Control Theory, SIAM, Philadelphia.
Chilali, M., and Gahinet, P., 1996, “H ∞ Design With Pole Placement Constraints: an LMI Approach,”IEEE Trans. Auto. Contr., Vol. 41, pp. 358–367.
Clayton, B. R., and Bishop, R. E., 1982, Mechanics ofMarine Vehicles, E & F. N. Spon, London.
Doyle, J. C., Glover, K., Khargonekar, P. P., and Francis, B. A., 1989, “State-space Solutions to Standard H2 and H∞ Control Problems,”IEEE Trans. Auto. Contr., Vol. 34, pp. 831–847.
Geuler, G. F., 1989, “Modelling, Design and Analysis of an Autopilot for Submarine Vehicles,”Int. Ship. Progress, Vol. 36, pp. 51–85.
Glover, K., and Doyle, J. C., 1988, “State Space Formula for All Stabilizing Controllers That Satisfy anH ∞ Norm Bound and Relations to Risk Sensitivity,”Syst. Contr. Letters, Vol. 11 pp. 167–172.
Healey, A. J., and Lienard, D., 1993, “Multivariable Sliding Mode Control for Autonomous Diving and Steering of Unmanned Underwater Vehicles,”IEEE J. Ocean Engr., Vol. 18, pp. 327–339.
Iwasaki, I., and Skelton, R. E., 1994, “All Controllers for the GeneralH ∞ Control Problem: LMI Existence Conditions and State Space Formulas,”Automatica, Vol. 30, pp. 1307–317.
Khargonekar, P., and Rotea, M., 1991, “Mixed H2/H∞ Control: a Convex Optimization Approach,”IEEE Trans. Auto. Contr., Vol. 36, pp. 824–836.
Marshfield, W. B., 1991, “Submarine Periscope-Depth Depth-Keeping Using an H-Infinity Controller Together with Sea-Noise-Reduction Notch Filter,”Trans. Institute Meas. Contr., Vol. 13, pp. 233–240.
Niewoehner, R. J., and Kaminer, I. I., 1996, “Integrated Aircraft-Controller Design Using Linear Matrix Inequalities,”AIAA J. Guid. Contr. Dynamics, Vol. 19, pp. 445–452.
Papoulias, F. A., 1993, “Dynamics and Bifurcations of Pursuit Guidance for Vehicle Path Keeping in the Dive Plane,”J. Ship Research, Vol. 37, pp. 148–165.
You, S. S., and Jeong, S. K., 1996, “Model-Based Feedforward Precompensation and VS-Type Robust Nonlinear Controller Postcompensation for Uncertain Robotic Systems with/Without Knowledge of Uncertainty Bounds,”KSME Journal, Vol. 10, pp. 296–304.
You, S. S., 1997, “Robust Autopilot Design for Submarine Vehicles,”J. Ocean Engr. Tech., Vol. 10, pp. 180–190.
Wang, Z., Chen, X., and Guo, Z., 1995, “Controller Design for Continuous Systems with Variance and Circular Pole Constraints,”Int. J. System Science, Vol. 26, pp. 1249–1256.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
You, SS., Chai, YH. Diving autopilot design for underwater vehicles using multi-objective control synthesis. KSME International Journal 12, 1116–1125 (1998). https://doi.org/10.1007/BF02942585
Received:
Issue Date:
DOI: https://doi.org/10.1007/BF02942585