
Abstract
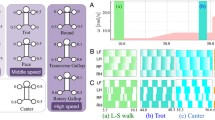
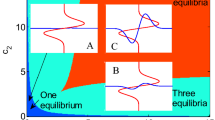
Animal locomotion employs different periodic patterns known as animal gaits. In 1993, Collins and Stewart recognized that gaits possessed certain symmetries and characterized the gaits of quadrupeds and bipeds using permutation symmetry groups, which impose constraints on the locomotion center called the central pattern generator (CPG) in the animal brain. They modeled the CPG by coupling four nonlinear oscillators and found that it was possible to reproduce all symmetries of the gaits by changing the coupling strength. Here we propose to extend this idea using coupled chaotic oscillators synchronized using the Pyragas method in order to characterize the CPG symmetries. We also evaluate the time series behavior when the foot is in contact with the ground: this has potential robotic applications.
Similar content being viewed by others

References
E A Muybridge,Animals in motion (Chapman and Hall, London, 1899); Republished by Dover Publications, New York, 1955
M Hildebrand,Science 150, 701 (1965)
J Gray,Animals locomotion (Wiedenfeld and Nicolson, London, 1968)
R Alexander,Int. J. Robot Res. 3, 49 (1984)
J J Collins and I N Stewart,J. Nonlin. Sci. 3, 349 (1993)
S Rossignol, A Cohen and S Grillner,Neural control of rhythmic movements in vertebrates (Wiley, New York, 1988)
A Dagg,Mammal Rev. 3, 135 (1973)
R Alexander and J Goldspink,Mechanics and energetics of animal locomotion (Chapman and Hall, London, 1977)
C C Canavier, R J Butera, R O Dror, D A Baxter, J W Clark and J H Byrne,Biol. Cybern. 77, 367 (1997)
M Hildebrand,Folia Biotheoretica 4, 10 (1964)
L Glass and R Young,Brain Res. 179, 207 (1979)
G Schöner, W Y Jiang and J A S Kelso,J. Theor. Biol. 142, 359 (1990)
J J Collins and I Stewart,Biol. Cybern. 71, 95 (1994)
J J Collins and S A Richmond,Biol. Cybern. 71, 375 (1994)
P L Buono and M Golubitsky,J. Math. Biol. 42, 291 (2001)
K Pyragas,Phys. Lett. 170, 421 (1992)
V Petrov, S K Scott and K Showalter,J. Chem. Phys. 97, 6191 (1992)
G Hu, Y Zhang, H A Cerdeira and S Chen,Phys. Rev. Lett. 85, 3377 (2000)
R Hegger and H Kantz,Practical implementation of nonlinear time series method, The TISEAN package (1998)
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Castellini, H., Yudiarsah, E., Romanelli, L. et al. Coupled chaotic oscillators and their relation to a central pattern generator for artificial quadrupeds. Pramana - J Phys 64, 525–534 (2005). https://doi.org/10.1007/BF02706200
Issue Date:
DOI: https://doi.org/10.1007/BF02706200