
Abstract
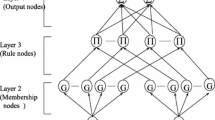
Since a robotic manipulator has a complicated mathematical model, it is difficult to design a control system based on the complicated multi-variable nonlinear coupling dynamic model. Intelligent controllers using fuzzy and neural network approaches do not need a real mathematical model to design the control structure and have attracted the attention of robotic control researchers recently. A traditional fuzzy logic controller does not have learning capability and it needs a lot of effort to search for the optimal control rules and the shapes of membership functions. Owing to the time-varying behaviour of the system, the required fine tracking accuracy is difficult to achieve by adjusting the fuzzy rules only. The implementation problems of neural network control are the initial training and initial transient stability. In order to improve the position control accuracy and system robustness for industrial applications, a neural controller is first trained off-line by using the input and output (I/O) data of a traditional fuzzy controller. Then the neural controller is implemented on a five-degrees-of-freedom robot with a back propagation algorithm for online adjustment. The experimental results show that this neural network controller achieved the required trajectory tracking accuracy after 15 on-line operations.
Similar content being viewed by others

References
C. W. de Silva and A. G. J. MacFarlane,Knowledge-Based Control with Application to Robots, Springer-Verlag, 1989.
M. Sugeno,Industrial Application of Fuzzy Control, Elsevier Science Publishers B.V. (North-Holland), 1985.
B. A. M. Wakileh and K. F. Gill, “Use of fuzzy logic in robotics”,Computers in Industry,10 pp. 35–46, 1988.
G. Vachtsevanos and H. Hexmoor, “A fuzzy logic approach to robotic path planning with obstacle avoidance”,Proceedings of 25th Conference on Decision and Control, Athens, Greece, December 1986.
A. Nedungadi and D. J. Wenzel, “A novel approach to robot control using fuzzy logic”,IEEE International Conference on Systems Man and Cybernetics, pp. 1925–1930, 1991.
S. Kim and M. Park, “Fuzzy compliance robot control using multi rule-base”,IEEE International Conference on Fuzzy Systems, San Diego, pp. 1343–1348, 1992.
J. Zhou and P. Coiffet, “Fuzzy control of robots”,IEEE International Conference on Fuzzy Systems, San Diego, pp. 1357–1364, 1992.
G. V. S. Raju and J. Zhou, “Fuzzy rule based approach for robot motion control”,IEEE International Conference on Fuzzy Systems, San Diego, pp. 1349–1356, 1992.
S. Kim and J. Lee, “Resolved motion rate control of redundant robots using fuzzy logic”,2nd IEEE International Conference on FUZZY Systems, San Francisco, pp. 333–338, 1993.
R. N. Lea, J. Hoblit and Y. Jani, “Fuzzy logic based robotic arm control”,2nd International Conference on Fuzzy Systems, San Francisco, pp. 128–133, 1993.
J. J. Hopfield, “Neural networks and physical systems with emergent collective computational abilities”,Proceedings of the National Academy of Science USA, 79, pp. 2554–2558, 1982.
D. E. Rumelhart and J. L. McClelland,Parallel Distributed Processing, vols. 1 and 2, MIT Press, 1986.
Tomochika Ozaki and Tatsuya Suzuki, “Trajectory control of robotic manipulators using neural networks”,IEEE Transactions on Industrial Electronics, 38(3), 1991.
Heng-Ming Tai, “Trajectory tracking using neural networks”,IEEE Control System Magazine,9, pp. 30–41, 1992.
Sun-Yuan Kung, “Neural network architectures for robotic applications”,IEEE Transactions on Robotic and Automation,5(5), 1989.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Huang, SJ., Hu, CF. Neural network controller for robotic motion control. Int J Adv Manuf Technol 12, 450–454 (1996). https://doi.org/10.1007/BF01186934
Issue Date:
DOI: https://doi.org/10.1007/BF01186934