
Abstract
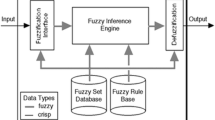
Fuzzy nets have been proposed to combine the learning ability of neural networks and the reasoning ability of fuzzy logic to deal with complex control systems. This paper presents a systematic way of identifying the significant factors and optimising the performance of a fuzzy-nets application. To present the methodology, a model of a truck backing up has been evaluated. Four factors were considered:
-
1.
The number of training sets.
-
2.
The number of fuzzy regions.
-
3.
The membership functions.
-
4.
The fuzzy reasoning methods which would affect the performance of the fuzzy-nets training scheme in nonlinear applications.
The Taguchi parameter design was implemented with anL 9 (34) orthogonal array to identify the optimal combination for training consideration. Both raw and signal-to-noise (S/N) ratios were evaluated to identify the optimal combination for the performance of fuzzy-nets training with very limited variation. The performance of the proposed fuzzy-nets scheme for the model of the truck backing up was represented by the average errors between the truck and loading dock: 0.178 units and 0.204 degrees. The results demonstrate that the Taguchi parameter design is a robust approach for optimising the performance of the fuzzy-nets training scheme.
Similar content being viewed by others
References
David E. Rumelhart, Bernard Widrow and Michael A. Lehr, “The basic ideas in neural networks”,Communications of the Association for Computing Machinery,37 (3), pp. 87–92, March 1994.
L. A. Zadeh, “Fuzzy sets”,Information and Control,8, pp. 338–353, 1968.
L. A. Zadeh, “Fuzzy algorithms”,Information and Control,12, pp. 94–102, 1965.
B. Kosko and S. Isaka, “Fuzzy logic”,Scientific American, pp. 76–81, July 1993.
Jyh-Shing R. Jang, “Self-learning fuzzy controllers based on temporal back propagation”,IEEE Transactions on Neural Networks,3 (5), pp. 714–723, September 1992.
Chin-Teng Lin and C. S. George Lee, “Neural-network-based fuzzy logic control and decision system”,IEEE Transactions on Computers,40 (12), pp. 1320–1336, December 1991.
Jian-Nan Lin and Shin-Min Song, “A novel fuzzy neural network for the control of complex systems”,Proceeding of the 1994 IEEE International Conference on Neural Networks, vol. 3, pp. 1668–1673.
Petri Vuorimaa, Tarmo Jukarainen and Esko Karpanoja, “A neural-fuzzy system for chemical agent detection”,IEEE Transactions on Fuzzy Systems,3 (4), pp. 415–424, November 1995.
E. Teixeria, G. Laforga and H. Azelvedo, “The use of neuro-fuzzy networks in the control of nonlinear systems”,Proceedings of International Conference on Industrial Electronics, Control and Instrumentation, pp. 1369–1373, 1994.
Joseph C. Chen, “Pokayoke Systems in Junmanned Manufacturing Cells”, PhD Dissertation, Auburn University, 1994.
Otto Vaatainen, Pentti Jarvela, Kyosti Valta and Pirkko Jarvela, “The effect of processing parameters on the quality of injection moulded parts by using Taguchi parameter design method”,Plastics, Rubber and Composites Processing and Applications,21 (4), pp. 211–217, 1994.
Y. H. Andrew Liou, Paul P. Lin, Richard R. Lindeke and H. D. Chiang, “Tolerance specification of robot kinematic parameters using an experimental design technique — the Taguchi Method”,Robotics and Computer-Integrated Manufacturing,10 (3), pp. 199–207, 1993.
Joseph C. Chen, Bernard C. Jiang and Chwan-Hwa Wu, “Learning optimization for CPN-based training in robot positioning control”,Journal of Intelligent Manufacturing,3, pp. 237–250, 1992.
Sally Ann Smesko and Eather Sans Takeuchi, “Prismatic thionyl chloride cell characterization through parametric analysis”,Journal of Power Sources,52, pp. 173–178, 1994.
Jeong-Du Kim and Min-Seou Choi, “Stochastic approach to experimental analysis of cylindrical lapping process”,International Journal of Machine Tools and Manufacture,35 (1), pp. 51–59, 1995.
S. H. Mok and D. G. Gorman, “Using Taguchi experimental design to investigate operating variables that significantly affect wear in mud pumps”,Journal of Engineering Tribology,209 (1), pp. 29–40, 1995.
Seong-Gon Kong and Bart Kosko, “Adaptive fuzzy systems for backing up a truck-and-trailer”,IEEE Transactions on Neural Networks,3 (2), pp. 211–223, Marrch 1992.
D. Nguyen and B. Widrow, “The truck backer-upper: an example of self-learning in neural networks”, InProceedings International Joint Conference Neural Networks,2, pp. 357–363, June 1989.
Chuen-Chien Lee, “Fuzzy logic in control systems: fuzzy logic controller — part I”,IEEE Transactions on Systems, Man and Cybernetics,20 (2), pp. 404–418, March/April 1990.
J. H. Hool and S. Maghsoodloo, “Introduction to off-line Taguchi-based quality design and improvement”, Short course handouts, Auburn University, 1986.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Chen, J.C., Lin, NH. Optimizing the fuzzy-nets training scheme using the Taguchi parameter design. Int J Adv Manuf Technol 13, 587–599 (1997). https://doi.org/10.1007/BF01176303
Issue Date:
DOI: https://doi.org/10.1007/BF01176303