
Abstract
In this paper, we describe a natural implementation of the classical logarithmic barrier function method for smooth convex programming. It is assumed that the objective and constraint functions fulfill the so-called relative Lipschitz condition, with Lipschitz constantM>0.
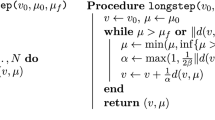
In our method, we do line searches along the Newton direction with respect to the strictly convex logarithmic barrier function if we are far away from the central trajectory. If we are sufficiently close to this path, with respect to a certain metric, we reduce the barrier parameter. We prove that the number of iterations required by the algorithm to converge to an ε-optimal solution isO((1+M 2)\(\sqrt n \)∣logε∣) orO((1+M 2)n∣logε∣), depending on the updating scheme for the lower bound.
Similar content being viewed by others


References
Frisch, R.,The Logarithmic Potential Method for Solving Linear Programming Problems, Memorandum, Institute of Economics, Oslo, Norway, 1955.
Frisch, R.,The Logarithmic Potential Method of Convex Programming, Memorandum, Institute of Economics, Oslo, Norway, 1955.
Parisot, G. R.,Résolution Numérique Approchée du Problème de Programmation Linèaire par Application de la Programmation Logarithmique, Revue Française de Recherche Opérationelle, Vol. 20, pp. 227–259, 1961.
Lootsma, F. A.,Logarithmic Programming: A Method of Solving Nonlinear Programming Problems, Philips Research Reports, Vol. 22, pp. 329–344, 1967.
Lootsma, F. A.,Constrained Optimization via Penalty Functions, Philips Research Reports, Vol. 23, pp. 408–423, 1968.
Fiacco, A. V., andMcCormick, G. P.,Nonlinear Programming: Sequential Unconstrained Minimization Techniques, Wiley, New York, New York, 1968.
Polak, E.,Computational Methods in Optimization, Academic Press, New York, New York, 1971.
Huard, P.,Resolution of Mathematical Programming with Nonlinear Constraints by the Methods of Centres, Nonlinear Programming, Edited by J. Abadie, North-Holland Publishing Company, Amsterdam, Holland, pp. 207–219, 1967.
Lootsma, F. A.,Boundary Properties of Penalty Functions for Constrained Minimization, PhD Thesis, Technical University Eindhoven, Eindhoven, Holland, 1970.
Lootsma, F. A.,A Survey of Methods for Solving Constrained Minimization Problems via Unconstrained Minimization, Numerical Methods for Nonlinear Optimization, Edited by F. A. Lootsma, Academic Press, New York, New York, 1972.
Karmarkar, N.,A New Polynomial-Time Algorithm for Linear Programming, Combinatorica, Vol. 4, pp. 373–395, 1984.
Todd, M. J.,Recent Developments and New Directions in Linear Programming, Technical Report No. 827, School of Operations Research and Industrial Engineering, College of Engineering, Cornell University, Ithaca, New York, 1988.
Gill, P. E., Murray, W., Saunders, M. A., Tomlin, J. A., andWright, M. H.,On Projected Newton Barrier Methods for Linear Programming and an Equivalence to Karmarkar's Projective Method, Mathematical Programming, Vol. 36, pp. 183–209, 1986.
Gonzaga, C. C.,An Algorithm for Solving Linear Programming Problems in O(n 3 L)Operations, Progress in Mathematical Programming: Interior Point Methods, Edited by N. Megiddo, Springer Verlag, New York, pp. 1–28, 1989.
Roos, C., andVial, J. P.,Long Steps with the Logarithmic Penalty Barrier Function in Linear Programming, Economic Decision Making: Games, Economics and Optimization, Edited by J. Gabszevwecz, J. F. Richard, and L. Wolsey, Elsevier Science Publisher, Amsterdam, Holland, pp. 433–441, 1990.
Gonzaga, C. C.,Large-Steps Path-Following Methods for Linear Programming: Barrier Function Method, SIAM Journal on Optimization, Vol. 1, 1991.
Renegar, J.,A Polynomial-Time Algorithm Based on Newton's Method for Linear Programming, Mathematical Programming, Vol. 40, pp. 59–93, 1988.
Vaidya, P. M.,An Algorithm for Linear Programming Which Requires O(((m+n)n 2+(m+n)1.5 n)L)Arithmetic Operations, Mathematical Programming, Vol. 47, pp. 175–201, 1990.
Den Hertog, D., Roos, C., andTerlaky, T.,A Potential Reduction Variant of Renegar's Short-Step Path-Following Method for Linear Programming, Linear Algebra and Its Applications, Vol. 152, pp. 43–68, 1991.
Sonnevend, G.,An Analytical Centre for Polyhedrons and New Classes of Global Algorithms for Linear (Smooth, Convex) Programming, Lecture Notes in Control and Information Science, Vol. 84, pp. 866–876, 1985.
Jarre, F.,On the Convergence of the Method of Analytic Centers when Applied to Convex Quadratic Programs, Mathematical Programming, Vol. 49, pp. 341–358, 1990/91.
Jarre, F.,The Method of Analytic Centers for Smooth Convex Programs, PhD Thesis, Institut für Angewandte Mathematik und Statistik, Universität Würzburg, Würzburg, Germany, 1989.
Mehrotra, S., andSun, J.,An Interior Point Algorithm for Solving Smooth Convex Programs Based on Newton's Method, Technical Report No. 88-08, Department of Industrial Engineering and Management Science, Northwestern University, Evanston, Illinois, 1988.
Nesterov, Yu. E., andNemirovsky, A. S.,Self-Concordant Functions and Polynomial Time Methods in Convex Programming, Central Economical and Mathematical Institute, USSR Academy of Science, Moscow, USSR, 1989.
Den Hertog, D., Roos, C., andTerlaky, T.,A Potential Reduction Method for a Class of Smooth Convex Programming Problems, SIAM Journal on Optimization, Vol. 2, 1992.
Wolfe, P.,A Duality Theorem for Nonlinear Programming, Quarterly of Applied Mathematics, Vol. 19, pp. 239–244, 1961.
Megiddo, N.,Pathways to the Optimal Set in Linear Programming, Proceedings of the Mathematical Programming Symposium of Japan, Nagoya, Japan, pp. 1–36, 1986.
Author information
Authors and Affiliations
Additional information
Communicated by F. Zirilli
on leave from Eötvös University, Budapest, Hungary.
Rights and permissions
About this article
Cite this article
Den Hertog, D., Roos, C. & Terlaky, T. On the classical logarithmic barrier function method for a class of smooth convex programming problems. J Optim Theory Appl 73, 1–25 (1992). https://doi.org/10.1007/BF00940075
Issue Date:
DOI: https://doi.org/10.1007/BF00940075