
Abstract
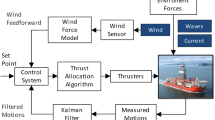
The design of a dynamic positioning system for a multiplymoored vessel with active winches and thrusters is presented. The proposed positioning system is based on the Kalman filter and linear optimal control. Its peculiarity is that it contains a scheme which allocates dynamically the control forces between moorings and thrusters. The allocation policy tries to minimize the energy of the control by maintaining the average propeller thrust near to zero. The efficacy of the scheme is illustrated by numerical simulations.
Similar content being viewed by others


References
Balchen, J. G., Jenssen, N. A., Mathisen, E., andSaelid, S.,A Dynamic Positioning System Based on Kalman Filtering and Optimal Control, Modeling, Identification, and Control, Vol. 1, No. 3, pp. 135–163, 1980.
Grimble, M. J., Patton, R. J., andWise, D. A.,The Design of Dynamic Ship Positioning Control Systems Using Stochastic Optimal Control Theory, Optimal Control Applications and Methods, Vol. 1, No. 2, pp. 167–202, 1980.
Saelid, S., Jenssen, N. A., andBalchen, J. G.,Design and Analysis of a Dynamic Positioning System Based on Kalman Filtering and Optimal Control, IEEE Transactions on Automatic Control, Vol. AC-28, No. 3, pp. 331–339, 1983.
Fung, P. T. K., andGrimble, M. J.,Dynamic Ship Positioning Using a Self-Tuning Kalman Filter, IEEE Transactions on Automatic Control, Vol. AC-28, No. 3, pp. 339–350, 1983.
Di Masi, G. B., Finesso, L., andPicci, G.,Design of an LQG Controller for Single-Point Moored Large Tankers, Automatica, Vol. 22, No. 2, pp. 155–169, 1986.
Ambrosino, G., Celentano, G., andGarofalo, F.,Design of a Dynamic Positioning System for a Multiple Moored Lay-Vessel, Proceedings of 10th IFAC World Congress, Vol. 6, pp. 241–245, 1987.
Ambrosino, G., Celentano, G., Garofalo, F., andGlielmo, L.,A Dynamic Positioning System for a Multiple Moored Vessel with Active Winches and Thrusters, Proceedings of 8th Ship Control System Symposium, Vol. 2, pp. 356–372, 1987.
Anderson, B. D. O., andMoore, J. B.,Optimal Filtering, Prentice-Hall, Englewood Cliffs, New Jersey, 1979.
Anderson, B. D. O., andMoore, J. B.,Linear Optimal Control, Prentice-Hall, Englewood Cliffs, New Jersey, 1971.
Ljung, L., andSoderstrom, T.,Theory and Practice of Recursive Identification, MIT Press, Cambridge, Massachusetts, 1983.
Brando, P., andBianchi, S.,Deep Water Pipelaying Global Dynamics, Pipeline and Gas Journal, Vol. 4, No. 1, pp. 17–24, 1982.
Hooft, J. P.,Advanced Dynamics of Marine Structures, Wiley, New York, New York, 1980.
Ambrosino, G., Celentano, G., Garofalo, F., andGlielmo, L.,Posizionamento Dinamico di una Nave Ancorata, Istituto Universitario Navale di Napoli, Report No. 87/A2, 1987.
Pierson, W. J., andMoskowitz, L.,A Proposed Spectral Form for Fully-Developed Wind Seas Based on Similarity Theory of S. A. Kitaigorodskii, Journal of Geophysical Research, Vol. 69, No. 6, pp. 5181–5190, 1964.
Author information
Authors and Affiliations
Additional information
Communicated by G. Leitmann
Rights and permissions
About this article
Cite this article
Ambrosino, G., Garofalo, F. & Glielmo, L. Dynamic mooring-forces allocation in dynamic ship positioning. J Optim Theory Appl 63, 309–332 (1989). https://doi.org/10.1007/BF00939800
Issue Date:
DOI: https://doi.org/10.1007/BF00939800