
Abstract
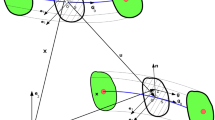
Using Hamilton’s principle the coupled nonlinear partial differential motion equations of a flying 3D Euler–Bernoulli beam are derived. Stress is treated three dimensionally regardless of in-plane and out-of-plane warpings of cross-section. Tension, compression, twisting, and spatial deflections are nonlinearly coupled to each other. The flying support of the beam has three translational and three rotational degrees of freedom. The beam is made of a linearly elastic isotropic material and is dynamically modeled much more accurately than a nonlinear 3D Euler–Bernoulli beam. The accuracy is caused by two new elastic terms that are lost in the conventional nonlinear 3D Euler–Bernoulli beam theory by differentiation from the approximated strain field regarding negligible elastic orientation of cross-sectional frame. In this paper, the exact strain field concerning considerable elastic orientation of cross-sectional frame is used as a source in differentiations although the orientation of cross-section is negligible.
Similar content being viewed by others
References
Karray, F., Modi, V.J., Chan, J.K.: Path planning with obstacle avoidance as applied to a class of space based flexible manipulators. Acta Astronaut. 37, 69–86 (1995)
Hiller, M.: Modelling, simulation and control design for large and heavy manipulators. Robot. Auton. Syst. 19, 167–177 (1996)
Shi, Z.X., Fung, E.H.K., Li, Y.C.: Dynamic modelling of a rigid-flexible manipulator for constrained motion task control. Appl. Math. Model. 23, 509–525 (1999)
Chen, W.: Dynamic modeling of multi-link flexible robotic manipulators. Comput. Struct. 79, 183–195 (2001)
Siciliano, B., Villani, L.: An inverse kinematics algorithm for interaction control of a flexible arm with a compliant surface. Control Eng. Pract. 9, 191–198 (2001)
Jen, C.W., Johnson, D.A., Gorez, R.: A reduced-order dynamic model for end-effector position control of a flexible robot arm. Math. Comput. Simul. 41, 539–558 (1996)
Zohoor, H., Khorsandijou, S.M.: Dynamic model of a mobile robot with long spatially flexible links, submitted to J. Scientia Iranica (2007)
Nayfeh, A.H., Pai, P.F.: Linear and Nonlinear Structural Mechanics, Wiley Series in Nonlinear Science. Wiley, New York (2004)
D’ Souza, A.F., Garg, V.K.: Advanced Dynamics, Modeling and Analysis. Prentice-Hall, Englewood Cliffs, NJ (1984)
Thomson, W.T.: Theory of Vibration with Applications, 3rd edn. Prentice-Hall, Englewood Cliffs, NJ (1988)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zohoor, H., Khorsandijou, S.M. Enhanced nonlinear 3D Euler–Bernoulli beam with flying support. Nonlinear Dyn 51, 217–230 (2008). https://doi.org/10.1007/s11071-007-9205-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-007-9205-6