
Abstract
Models with impact or dry friction, yielding discontinuous velocities or accelerations, have motivated research for appropriate numerical methods in the community of non-smooth dynamics. In this work, we apply such methods on the grand piano action. This multibody system has two properties of interest in terms of modelling and simulation: it is extremely sensitive to small misadjustments, and its functioning strongly relies on dry friction and stick–slip transitions—known to be crucial for the touch of the pianist. Using numerical methods of non-smooth contact dynamics, the non-smooth character of dry friction was conserved, in contrast to classical approaches based on regularization which additionally impose the somewhat arbitrary choice of a regularizing parameter. The use of such numerical method resulted in computations about a few hundred times faster than those reported in recent literature. For the first time, the presented predictions of the piano action’s simulations are forces (in particular, the reaction force of the key on the pianist’s finger), instead of displacements which filter out most of the dynamical subtleties of the mechanism. The comparisons between measured and simulated forces in response to a given motion are successful, which constitutes an excellent validation of the model, from the dynamical and the haptic points of view. Altogether, numerical methods for non-smooth contact dynamics applied to a non-smooth model of the piano action proved to be both accurate and efficient, opening doors to industrial and haptic applications of sensitive multibody systems for which dry friction is essential.












Similar content being viewed by others


Notes
The non-smooth character of the key action is also used by technicians during the adjustment procedure.
According to piano technicians, the sound of a note is sensitive to the “quality” of the shank. In order to select shanks (before gluing the hammer’s head), a common practice consists in listening to the sound they emit when thrown on the floor (for example).
In the scheduled future versions of the simulation software, a direct motion-input is possible, eliminating the need for the piston.
References
Acary V, Brogliato B (2008) Numerical methods for nonsmooth dynamical systems: applications in mechanics and electronics, vol 35. Springer, Berlin
Askenfelt A, Jansson E (1991) From touch to string vibrations. II: the motion of the key and hammer. J Acoust Soc Am 90:2383
Barbacci A, Diener J, Hémon P, Adam B, Donès N, Reveret L, Moulia B (2014) A robust videogrametric method for the velocimetry of wind-induced motion in trees. Agric For Meteorol 184:220–229
Bokiau B, Poncelet A, Fisette P, Docquier N (2012) Multibody model of a grand piano action aimed at understanding and demystifying the escapement principle. In: The 2nd joint international conference on multibody system dynamics
Boutillon X (1988) Model for piano hammers: experimental determination and digital simulation. J Acoust Soc Am 83(2):746–754
Brenon C (2002) Mécanique de la touche de piano (Piano action), Master’s thesis. Université Pierre et Marie Curie, Paris VI
Chabassier J, Duruflé M (2014) Energy based simulation of a timoshenko beam in non-forced rotation. influence of the piano hammer shank flexibility on the sound. J Sound Vib 333(26):7198–7215
Chartrand R (2011) Numerical differentiation of noisy, nonsmooth data. ISRN Appl Math. doi:10.5402/2011/164564
Dijksterhuis P (1965) De piano. Ned Akoest Genoot 7:50–65
Gillespie B, Yu B, Grijalva R, Awtar S (2011) Characterizing the feel of the piano action. Comput Music J 35(1):43–57
Hayashi E, Yamane M, Mori H (1999) Behavior of piano-action in a grand piano. I. analysis of the motion of the hammer prior to string contact. J Acoust Soc Am 105:3534
Hirschkorn M (2004) Dynamic model of a piano action mechanism, Ph.D. thesis. University of Waterloo
Hirschkorn M, McPhee J, Birkett S (2006) Dynamic modeling and experimental testing of a piano action mechanism. J Comput Nonlinear Dyn 1(1):47–55
Itô K (1993) Encyclopedic dictionary of mathematics, vol 1. MIT Press, Cambridge
Izadbakhsh A (2006) Dynamics and control of a piano action mechanism, Master thesis
Izadbakhsh A, McPhee J, Birkett S (2008) Dynamic modeling and experimental testing of a piano action mechanism with a flexible hammer shank. J Comput Nonlinear Dyn. doi:10.1115/1.2908180
Jean M (1999) The non-smooth contact dynamics method. Comput Methods Appl Mech Eng 177(3):235–257
Leissa A (2005) The historical bases of the Rayleigh and Ritz methods. J Sound Vib 287(4):961–978
Links H (2011) Modeling of a grand piano action mechanism, Master Thesis
Lozada J (2007) Modeling, haptic control and novel concepts for musical keyboards, Theses. École Polytechnique. https://pastel.archives-ouvertes.fr/tel-00280538
Lucas B, Kanade T (1981) An iterative image registration technique with an application to stereo vision. IJCAI 81:674–679
Masoudi R, Birkett S (2015) Experimental validation of a mechanistic multibody model of a vertical piano action. J Comput Nonlinear Dyn 10(6):061,004
Merlhiot X (2011) On some industrial applications of time-stepping methods for nonsmooth mechanical systems: issues, successes and challenges. In: Euromech Colloquium [516]-nonsmooth contact and impact laws in mechanics
Merlhiot X, Le Garrec J, Saupin G, Andriot C (2012) The XDE mechanical kernel: efficient and robust simulation of multibody dynamics with intermittent nonsmooth contacts. In: The 2nd joint international conference on multibody system dynamics
Mori T (1997) A comparison between upright and grand pianos. J Eur Acoust Assoc
Oboe R (2006) A multi-instrument, force-feedback keyboard. Comput Music J 30(3):38–52
Oledzki A (1973) Dynamics of piano mechanisms. Mech Mach Theory 7(4):373–385
Principeaud N, Boutillon X (2008) Reproducibility of piano playing. J Acoust Soc Am 123(5):3125–3125
Renner (2014) Technical manual—the hornbeam advantage www.rennerusa.com
Rockafellar RT (1970) Convex analysis (princeton mathematical series), vol 46. Princeton, Princeton University Press, p 49
Southwell R (1923) XVI. On Castigliano’s theorem of least work, and the principle of St. Venant. Lond Edinb Dublin Philos Mag J Sci 45(265):193–212
Stewart DE (2000) Rigid-body dynamics with friction and impact. SIAM Rev 42(1):3–39
Studer C (2009) Numerics of unilateral contacts and friction, vol 47. Springer, Berlin
Stulov A (2005) Experimental and computational studies of piano hammers. Acta Acust United Acust 91(6):1086–1097
Thorin, A.: Non-smooth model of the grand piano action, Theses. École Polytechnique (2013). https://pastel.archives-ouvertes.fr/pastel-00939493v1
Thorin A, Boutillon X, Lozada J (2014) Modelling the dynamics of the piano action: is apparent success real? Acta Acust United Acust 100(6):1162–1171
Tomasi C, Kanade T (1991) Detection and tracking of point features. School of Computer Science, Carnegie Mellon University, Pittsburgh
Van den Berghe G, De Moor B, Minten W (1995) Modeling a grand piano key action. Comput Music J 19(2):15–22
Vyasarayani CP, Birkett S, McPhee J (2009) Modeling the dynamics of a compliant piano action mechanism impacting an elastic stiff string. J Acoust Soc Am 125:4034
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Appendix: Models for estimating the rigid body approximation for the key and the hammer
Appendix: Models for estimating the rigid body approximation for the key and the hammer
The purpose of this appendix is to give the details of the estimation, for the key and the hammer, of:
-
their first modal frequency (dynamics);
-
their flexibility as linear elastic bodies compared the flexibility of the felts (statics).
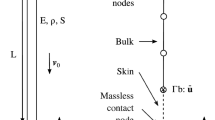
Four different models were considered in total: two for each piece, see Fig. 13.

Models used for investigating the rigid body approximation of the key and the hammer. a Beam model of the key, b beam model of the hammer shank, c rigid key in contact with the felt of the blocked whippen, d rigid hammer in contact with the felt of the knuckle and the blocked jack. The sliding hinge joint element in a and b blocks translation in the out-of-plane direction only: it represents the whippen–key contact for the key (left) and the hammer roller–jack contact for the hammer (right). a Elastic key model, b elastic hammer model, c rigid key model, d rigid hammer model
The first mode of vibration was approximated using the Rayleigh–Ritz method (see for example [18]). The mass of the key was assumed to be equally distributed while for the hammer, it was assumed to be concentrated at the center of the hammer head. The static deformations \(\varphi _{{\text {key}}}\), \(\varphi _{{\text {hammer}}}\) in response to the corresponding weight were calculated and used as the shape functions for the Rayleigh quotient. With point O corresponding to the origin of the x-axis, the calculated expressions are:
and
An approximation of the frequency of the first eigenmode is \(\sqrt{R}/(2\pi )\) where R is the Rayleigh quotient
The calculations yield \(f_{{\text {1,key}}}={355}\,{\,{\hbox {Hz}}}\) and \(f_{{\text {1,hammer}}}={39}\,{\,{\hbox {Hz}}}\).
The flexibilities \(\psi ^{{\text {e}}}_{{\text {key, hammer}}}\) of the key as seen from the finger, or of the hammer as seen from the hammer head, and due to the elasticity of wood, can be estimated with the same models (see Fig. 13a, b). The strain energy U of the beams for a force F applied at position \(L_1+L_2\) is given by the integration of the squared moment over the length, divided by 2EI; it comes:
The flexibility \(\psi ^{{\text {e}}}\) is given by Castigliano theorem (see for example [31]):
With \(L_1={0.18}\,{\hbox {m}}\), \(L_2={0.13}\,{\hbox {m}}\) for the key and \(L_1={0.13}\,{\hbox {m}}\), \(L_2={0.016}\,{\hbox {m}}\) for the hammer, the flexibilities for the elastic model with rigid boundary conditions are \(\psi ^{{\text {e}}}_{{\text {key}}}={1.5 \times 10^{-5}}{\,{\hbox {m}\,\mathrm{N}}^{-1}}\) and \(\psi ^{{\text {e}}}_{{\text {hammer}}}={1.2 \times 10^{-3}}{\,{\hbox {m}\,\mathrm{N}}^{-1}}\) (the value of the other parameters is given in Table 3).
The flexibilities \(\psi ^{{\text {f}}}_{{\text {location}}}\) due to felts only, estimated at a given location, come as follows: each beam is considered rigid, with its motion limited by nearby felts (see Fig. 13c, d). For the nonlinear felt law given in Eq. (6), the average flexibility is
The ratio of the flexibilities at the finger end of the key (respectively, at the hammer’s head) and at the corresponding felt (whippen and knuckle, respectively) is \(\psi ^{{\text {f}}}_{{\text {key, hammer}}}/\psi ^{{\text {f}}}_{{\text {felt}}}=\lambda ^2\) where \(\lambda =L_1/L_2\) (respectively \((L_1+L_2)/L_2\)). Since the force applied at the finger end (respectively at the hammer’s head position) is \(F_{{\text {key, hammer}}}=F_{{\text {felt}}}/\lambda\), it comes
Since the felts are nonlinear springs, it is normal that the flexibility depends on the force level.
For the key, 5 N represents a typical force level exerted by the finger. For the hammer, the mass is concentrated at its head. With a mass of 12 g, typical of the bass hammers, a forte keystroke corresponds to a displacement of \({5\,\hbox {cm}}\) of the head in about \({20\,\hbox {ms}}\), hence an average inertia force \(F={3\,\hbox {N}}\) at the head position. With the parameters values \(k=1.6\times 10^{10}\) uSI and \(r=2.7\) for the whippen-key felt and \(k=7\times 10^9\) uSI and \(r=3\) for the knuckle’s felt, the flexibilities are \(\psi ^{{\text {f}}}_{{\text {key}}}={9.5 \times 10^{-5}}{\,{\hbox {m}\,\mathrm{N}}^{-1}}\) and \(\psi ^{{\text {f}}}_{{\text {hammer}}}={4.8 \times 10^{-3}}{\,{\hbox {m}\,\mathrm{N}}^{-1}}\). For lower force levels, the flexibilities are larger since the felts are hardening springs.
Rights and permissions
About this article

Cite this article
Thorin, A., Boutillon, X., Lozada, J. et al. Non-smooth dynamics for an efficient simulation of the grand piano action. Meccanica 52, 2837–2854 (2017). https://doi.org/10.1007/s11012-017-0641-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-017-0641-1