
Abstract
Background
The implementation of robotic technology in minimally invasive surgery has led to the need to develop more efficient and effective training methods, as well as assessment and skill maintenance tools for surgical education. Multiple simulators and procedures are available for educational and training purposes. A need for comparative evaluations of these simulators exists to aid users in selecting an appropriate device for their purposes.
Methods
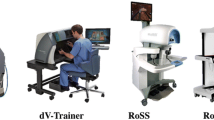
We conducted an objective review and comparison of the design and capabilities of all dedicated simulators of the da Vinci robot, the da Vinci Skill Simulator (DVSS) (Intuitive Surgical Inc., Sunnyvale, CA, USA), dV-Trainer (dVT) (Mimic Technologies Inc., Seattle, WA, USA), and Robotic Surgery Simulator (RoSS) (Simulated Surgical Skills, LLC, Williamsville, NY, USA). This provides base specifications of the hardware and software, with an emphasis on the training capabilities of each system.
Results
Each simulator contains a large number of training exercises, DVSS = 40, dVT = 65, and RoSS = 52 for skills development. All three offer 3D visual images but use different display technologies. The DVSS leverages the real robotic surgeon’s console to provide visualization, hand controls, and foot pedals. The dVT and RoSS created simulated versions of all of these control systems. They include systems management services which allow instructors to collect, export, and analyze the scores of students using the simulators.
Conclusions
This study is the first to provide comparative information of the three simulators functional capabilities with an emphasis on their educational skills. They offer unique advantages and capabilities in training robotic surgeons. Each device has been the subject of multiple validation experiments which have been published in the literature. But those do not provide specific details on the capabilities of the simulators which are necessary for an understanding sufficient to select the one best suited for an organization’s needs.






Similar content being viewed by others


References
Schout BM, Hendriks AJ, Scheele F et al (2010) Validation and implementation of surgical simulators: a critical review of present, past, and future. J Surg Endosc 24(3):536–546
Wohaibi EM, Bush RW, Earle DB et al (2010) Surgical resident performance on a virtual reality simulator correlates with operating room performance. J Surg Res 160(1):67–72
Skills simulator for the da Vinci Si surgical system (users manual) (2012) Intuitive Surgical Inc., Sunnyvale
dV-Trainer robotic simulator users manual (2012) Mimic Technologies Inc., Seattle
Robotic surgery simulator users manual: for models S and Si (2012) Simulated Surgical Systems LLC, Williamsville
McDougall EM (2007) Validation of surgical simulators. J Endourol 21(3):244–247
Hung AJ, Zehnder P, Patil MB (2011) Face, content and construct validity of a novel robotic surgery simulator. J Urol 186(3):1019–1024
Kelly DC, Margules AC, Kundavaram CR (2012) Face, content, and construct validation of the da Vinci Skills Simulator. J Urol 79(5):1068–1072
Liss MA, Abdelshehid C, Quach S (2012) Validation, correlation, and comparison of the da Vinci trainer(™) and the da Vinci surgical skills simulator(™) using the mimic(™) software for urologic robotic surgical education. J Endourol 26(12):1629–1634
Lendvay, Casale P, Sweet R, Peters C (2008) Initial validation of a virtual-reality robotic simulator. J Robot Surg 2(3):145–149
Kenney P, Wszolek M, Gould J, Libertino J, Moinzadeh A (2009) Face, content, and construct validity of dV-Trainer, a novel virtual reality simulator for robotic surgery. J Urol 73(6):1288–1292
Sethi AS, Peine WJ, Mohammadi Y (2009) Validation of a novel virtual reality robotic simulator. J Endourol 23(3):503–508
Perrenot C, Perez M, Tran N (2012) The virtual reality simulator dV-Trainer(®) is a valid assessment tool for robotic surgical skills. J Surg Endosc 26(9):2587–2593
Korets R, Mues AC, Graversen JA, Gupta M, Benson MC, Cooper KL, Landman J, Badani KK (2011) Validating the use of the mimic dV-Trainer for robotic surgery skill acquisition among urology residents. J Urol 78(6):1326–1330
Lee JY, Mucksavage P, Kerbl DC (2012) Validation study of a virtual reality robotic simulator–role as an assessment tool? J Urol 187(3):998–1002
Schreuder HWR, Persson JEU, Wolswijk RGH, Ihse I, Schijven MP, Verheijen RHM (2014) Validation of a novel virtual reality simulator for robotic surgery. Sci World J 2014:507076. doi:10.1155/2014/507076
Seixas-Mikelus SA, Kesavadas T, Srimathveeravalli G (2010) Face validation of a novel robotic surgical simulator. J Urol 76(2):357–360
Stegemann AP, Kesavadas T, Rehman S, Sharif M, Rao A, DuPont N, Shi Y, Wilding,G, Hassett J, Guru K (2012) Development, implementation and validation of a simulation-based curriculum for robot-assisted surgery. Presented at the AUA poster session, Atlanta, 19–23 May 2012
Hung AJ, Patil MB, Zehnder P (2012) Concurrent and predictive validation of a novel robotic surgery simulator: a prospective, randomized study. J Urol 187(2):630–637
Colaco M, Balica A, Su D (2012) Initial experiences with RoSS surgical simulator in residency training: a validity and model analysis. J Robot Surg 7(1):71–75
Finnegan KT, Meraney AM, Staff I (2012) da Vinci skills simulator construct validation study: correlation of prior robotic experience with overall score and time score simulator performance. J Urol 80(2):330–335
Connolly M, Seligman J, Kastenmeier A, Goldblatt M, Gould JC (2014) Validation of a virtual reality-based robotic surgical skills curriculum. Surg Endosc. doi:10.1007/s00464-013-3373-x
Lendvay TS, Brand TC, White L, Kowalewski T, Jonnadula S, Mercer LD, Khorsand D, Andros J, Hannaford B, Satava RM (2013) Virtual reality robotic surgery warm-up improves task performance in a dry laboratory environment: a prospective randomized controlled study. J Am Coll Surg 216:1181–1192
Raza SJ, Chowriappa A, Stegemann A, Ahmed K, Shi Y, Wilding G, Kaouk J, Peabody J, Menon M, Kesavadas T, Guru KA. (2013) Construct validation of the fundamental skills of robotic surgery (FSRS) curriculum. Podium presentation, AUA annual congress, San Diego
Tergas AI, Sheth SB, Green IC, Giuntoli RL 2nd, Winder AD, Fader AN (2013) A pilot study of surgical training using a virtual robotic surgery simulator. JSLS 17:219–226
Lerner M, Ayalew M, Peine W, Sundaram C (2010) Does training on a virtual reality robotic simulator improve performance on the da Vinci® surgical system? J Endourol 24(3):467–472
Chowriappa A, Raza SJ, Stegemann A, Ahmed K, Shi Y, Wilding G, Kaouk J, Peabody JO, Menon M, Kesavadas T, Guru KA (2013) Development & validation of a composite grading & scoring system for robot-assisted surgical training—the robotic skills assessment scale. Podium presentation, AUA annual congress, San Diego
Culligan P, Gurshumov E, Lewis C, Priestley J, Komar J, Salamon C (2014) Predictive validity of a training protocol using a robotic surgery simulator. Female Pelvic Med Reconstr Surg 20:48–51
Stegemann A, Kesavadas T, Rehman S, Sharif M, Rao M, duPont N, Shi Y, Wilding G, Hassett J, Guru K (2013) Development, implementation, and validation of a simulation-based curriculum for robot-assisted surgery. J Urol 81(4):767–774
Ahmed K, Chowriappa A, Din R, Field E, Raza SJ, Fazili A, Samarasekera D, Kaouk J, Eichel L, Joseph J, Ghazi A, Mohler J, Peabody J, Eun D, Shi Y, Wilding G, Kesavadas T, Guru KA (2013) A multi-institutional randomized controlled trial of an augmented-reality based technical skill acquisition module for robot-assisted urethro-vesical anastomosis. Podium presentation, AUA annual congress, San Diego
Acknowledgments
The authors wish to thank the following representatives of each simulator company for their assistance in collecting data and images, as well as verifying the accuracy of the contents of the paper. Peter Dominick, Intuitive Surgical Inc.; Jeff Berkley, Mimic Technologies, Inc.; and Kesh Kesavadas, Simulated Surgical Systems, LLC.
da Vinci Skills Simulator photos ©2013 Intuitive Surgical, Inc. Used with permission. dV-Trainer Simulator photos ©2013 Mimic Technologies, Inc. Used with permission. RoSS Simulator photos ©2013 Simulated Surgical Systems, LLC. Used with permission.
Funding Source
U.S. Army Telemedicine and Advanced Technology Research Center. Grant #: W81XWH-11-2-0158.
Disclosures
Florida Hospital has received a research grant from Mimic Technologies Inc. for a project unrelated to this study. Roger Smith, Mireille Truong and Manuela Perez have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (MOV 73241 kb)
Rights and permissions
About this article

Cite this article
Smith, R., Truong, M. & Perez, M. Comparative analysis of the functionality of simulators of the da Vinci surgical robot. Surg Endosc 29, 972–983 (2015). https://doi.org/10.1007/s00464-014-3748-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-014-3748-7