
Abstract
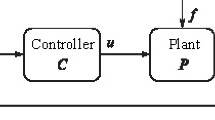
We study pole placement in SISO linear control systems with low-order controllers is studied. A method for finding critical (including optimal and suboptimal) pole placement in closedloop systems is theoretically justified and demonstrated on an example. Using critical root diagrams and root polynomials, it is possible to analytically express the parameters of a suboptimal controller in terms of root coordinates, in particular, the real and imaginary parts of characteristic roots. The resulting algebraic equations and inequalities allow specifying the left-most shift of the pole placement domain and the greatest relative stability (possibly taking into account oscillation) without cumbersome calculations.
Similar content being viewed by others

References
M. Kano and M. Ogawa, “The State of the Art in Chemical Process Control in Japan: Good Practice and Questionnaire Survey,” J. Process Control 20 (Is. 9), 969–982 (2010).
D. Henrion, D. Arzelier, and D. Peaucelle, “Positive Polynomial Matrices and Improved LMI Robustness Conditions,” Automatica 39 (Is. 8), 1479–1485 (2003).
B. T. Polyak and P. S. Shcherbakov, “Difficult Problems of Linear Control Theory. Some Approaches to Their Solution,” AIT, No. 5, 7–46 (2005).
A. N. Koryukin and A. V. Chekhonadskikh, “Extreme Root Location of Real Polynomials and Stabilization of 3-Mass Control,” in Algebra and Model Theory (NSTU, Novosibirsk, 2011), Is. 8, pp. 19–39.
A. N. Koryukin and A. V. Chekhonadskikh, “Stability Limit of a Three-Mass System with a Third-Order Controller. Part 1,” Sb. Nauch. Tr. NGTU, No. 4, 3–22 (2011).
A. N. Koryukin, A. V. Chekhonadskikh, “Stability Limit of a Three-Mass System with a Third-Order Controller. Part 2,” Sb. Nauch. Tr. NGTU, No. 5, 37–56 (2012).
A. A. Voevoda, A. N. Koryukin, and A. V. Chekhonadskikh, “Reducing the Stabilizing Control Order for a Double Inverted Pendulum,” Avtometriya 48 (6), 69–83 (2012)
A. A. Voevoda, A. N. Koryukin, and A. V. Chekhonadskikh, “Reducing the Stabilizing Control Order for a Double Inverted Pendulum,” Optoelectron., Instrum. Data Process. 48 (6), 593–604 (2012)].
B. T. Polyak and P. S. Shcherbakov, “Numerical Search of Stable or Unstable Element in Matrix or Polynomial Families: A Unified Approach to Robustness Analysis and Stabilization,” in Robustness in Identification and Control (Springer, London, 1999), Ser. Lect. Notes in Control and Inform. Sci. Vol. 245, pp. 344–358.
J. V. Burke, D. Henrion, A. S. Lewis, and M. L. Overton, “Stabilization Via Nonsmooth, Nonconvex Optimization,” IEEE Trans. Automat. Contr. 51 (11), 1760–1769 (2006).
A. M. Shubladze, “Sufficient Conditions for an Extremum in Systems with Maximum Relative Stability. I,” AiT, No. 3, 93–105 (1997).
A. M. Shubladze, “Sufficient Conditions for an Extremum in Systems with Maximum Relative Stability. II,” AiT, No. 8, 67–79 (1997).
A. M. Shubladze, V. E. Popadko, A. A. Yakusheva, and S. I. Kuznetsov, “PID Control Solutions Optimal in the Relative Stability. Part 1,” in Control of Large Systems (Institute of Control Sciences, Moscow, 2008), Iss. 22, pp. 86–100 [in Russian].
A. M. Shubladze, V. E. Popad’ko, A. A. Yakusheva, et al., “PID Control Solutions Optimal in the Relative Stability. Part 2”, in Control of Large Systems (Institute of Control Sciences, Moscow, 2008), Iss. 23, pp. 39–55 [in Russian].
A. A. Voevoda, V. V. Plohotnikov, and A. V. Chekhonadskikh, “Combined Cartesian Coordinates in the Space of Roots of Polynomials with Real Coefficients,” Sb. Nauch. Tr. NGTU, Iss. 1, 153–156 [in Russian].
A. V. Chekhonadskikh, “Metric, Graduation, and Optimization of the Placement of Characteristic Roots in Control Systems,” Nauch. Vestn. NGTU, No. 1, 165–182 (2009).
A. A. Voevoda and A. V. Chekhonadskikh, “Optimization of the Pole Location of Automatic Control Systems with a Reduced-Order Controller,” Avtometriya 45 (5), 113–123 (2009)
A. A. Voevoda and A. V. Chekhonadskikh, “Optimization of the Pole Location of Automatic Control Systems with a Reduced-Order Controller,” Optoelectron., Instrum. Data Process. 45 (5), 427–480 (2009)].
A. V. Chekhonadskikh, “Step-Differential Optimization of the Roots of the Characteristic Polynomial of Control Systems,” Nauch. Vestn. NGTU, No. 4, 205–208 (2008).
A. A. Voevoda and A. V. Chekhonadskikh, “Overcoming Nondifferentiability in Optimization Synthesis of Automatic Control Systems,” Avtometriya 46 (5), 11–17 (2010)
A. A. Voevoda and A. V. Chekhonadskikh, “Overcoming Nondifferentiability in Optimization Synthesis of Automatic Control Systems,” Optoelectron., Instrum. Data Process. 46 (5), 408–413 (2010)].
A. A. Voivoda, A. V. Chekhonadskikh, and E. V. Shoba, “Modal Design Using Polynomial Expansion: Separation of Motions for Stabilization of a Three-Mass System,” Nauch. Vestn. NGTU, No. 2, 39–46 (2011).
A. V. Chekhonadskikh, “Algebraic Method of Designing Low-Order Control Algorithms,” Author’s Thesis of Doctoral Dissertation (Novosibirsk State Technical University, Novosibirsk, 2013).
Author information
Authors and Affiliations
Corresponding author
Additional information
Original Russian Text © A.V. Chekhonadskikh, 2015, published in Avtometriya, 2015, Vol. 51, No. 5, pp. 69–81.
About this article

Cite this article
Chekhonadskikh, A.V. Root coordinates in the design of SISO control systems. Optoelectron.Instrument.Proc. 51, 485–495 (2015). https://doi.org/10.3103/S8756699015050088
Received:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S8756699015050088