
Abstract
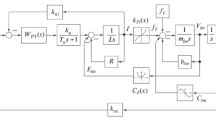
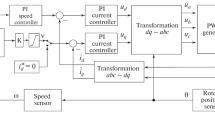
This paper considers the mathematical description of a servo drive system with a linear electric motor for the direct valve control system instead of the flapper–nozzle system. The description relies on the physical approach to determining electromagnetic parameters and electromechanical characteristics of electric motors. The obtained nonlinear traction characteristic and the resulting characteristic from the action of electromagnetic force and elasticity of the centering spring are used to determine the motor stroke limitations. The nonlinear action of counter-EMF against a rising electromagnetic time constant is substantiated. The solution proposed for the electrohydraulic tracking system is an adaptive control algorithm with an exomodel synthesized by the Lyapunov method that provides dissipativity of adaptation processes and expands the control range. The results of the practical tests of the adaptive control system are considered by the example of a servo system in the MATLAB/Simulink suite and on physical servo drive models.






Similar content being viewed by others

REFERENCES
Konstantinov, S.V., Kuznetsov, V.E., Polyakhov, N.D., Red’kov, P.G., and Trifonova, O.I., Elektrogidravlicheskie rulevye privody s adaptivnym upravleniem manevrennykh samoletov (Electrohydraulic Steering Gears with Adaptive Control of Maneuverable Aircrafts), St. Petersburg: S.-Peterb. Gos. Elektrotekh. Univ., LETI, 2011.
Kuznetsov, V.E. and Polyakhov, N.D., Adaptive control of technical plants based on exo-model, Proc. 2015 XVIII Int. Conf. on Soft Computing and Measurements (SCM), St. Petersburg, 2015, no. 7 190 425.
Kuznetsov, V.E., Design of adaptive control technical systems with limited uncertainty based on exo-model, Int. Rev. Autom. Control, 2016, vol. 9, no. 4.
Bortsov, Yu.A., Polyakhov, N.D., and Putov, V.V., Elektromekhanicheskie sistemy s adaptivnym i modal’nym upravleniem (Electromechanical Systems with Adaptive and Modal Control), Leningrad: Energoatomizdat, 1984.
Funding
This publication was made as part of the section Developing Principles and Algorithms for Controlling, Predicting, and Evaluating Condition of Complex Dynamic Objects with Uncertainty and Complex Behavior of a state order of the Ministry of Science and Education of the Russian Federation, project no. 8.7141.2017/BCh.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by S. Kuznetsov
About this article

Cite this article
Kuznetsov, V.E., Chung, P.T. & Konstantinov, S.V. Expanding Control Range of Nonlinear Precision Tracking Systems with a Linear Electric Motor by Means of Adaptive Control. Russ. Electr. Engin. 90, 786–792 (2019). https://doi.org/10.3103/S1068371219120071
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068371219120071