
Abstract
Indentation techniques have proven to be effective to characterize the mechanical properties of materials. For the elastic deformation, the commonly used models are Hertz model and Sneddon model. However, neither of them works for indenting the spherical samples using the pyramid or conical indenter. Therefore, one modified Sneddon model has been developed to determine the Young’s modulus of spherical samples from indentation results. In this study, the effects of sample diameter and indenter angles on indentation tests were investigated by finite element method (FEM). The empirical correction parameters in the new mathematical model were introduced based on dimensional analysis and determined by the numerical fitting to FEM results. Experimental tests with different conical indenters have demonstrated that the new model is capable to reliably determine the Young’s modulus of the spherical samples. The new model can fill the gap of the contact mechanics and enrich the experimental solid mechanics for the interpretation of indentation results.
Graphic abstract

Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The macroscopic mechanical properties of materials have traditionally and generally been determined by uniaxial tensile/compression and multiaxial tests, such as metals, concrete and polymer materials [1,2,3,4]. However, these methods requires the samples with specific geometries which may not be always feasible [5]. Indentation techniques (incl. nanoindentation and atomic force microscope (AFM)) have been developed to circumvent such an issue. The force-indentation depth curves obtained from an indentation (or nanoindentation) test can be used to determine various mechanical properties of materials, such as, Young’s modulus [6], hardness [7], fracture toughness [8, 9], interfacial adhesion [10, 11], viscoelastic properties [12,13,14,15,16] and anisotropic elastic properties [17, 18]. Nanoindentation techniques have advantages in characterizing mechanical properties of thin coatings [19,20,21,22,23,24], nanowires [25, 26], nanoparticles [27,28,29], bacteria[30, 31] and mammalian cells [32,33,34,35,36,37,38] due to their capability of probing mechanical properties at nanoscale.
For the elastic–plastic deformation during the indentation process, the Oliver and Pharr method is the most widely used approach to determine the Young’s modulus and hardness by analyzing the unloading segment of force–displacement curve (e.g. the maximum load and the initial unloading slope) [6, 7]. Built on this, there are also some energy-based methods to determine the Young’s modulus and hardness [39, 40], for instance, an approximate relationship between the ratio of hardness to Young’s modulus (H/E) and the irreversible work to total work (Wirr/Wt) was found by Cheng and Cheng [41]. Later, Chen and Bull [39] found such a linear relationship works very well for a limited range of materials. They have developed a nonlinear model to describe the relation between H/E and Wirr/Wt for a wide range of materials. In recent years, machine learning method using different algorithms [42,43,44] have been adopted to identify elastic–plastic properties of materials when the constitutive materials models may be unknown.
For the elastic deformation only, the commonly used models are Hertz model or Sneddon model [45, 46]. For the former, it was initially developed for contacts between two spheres, two cylinders or sphere-flat surface pair [46]. In practice, spherical indenter has been widely used to measure the elastic properties of engineering materials [47,48,49]. When using the Hertz model, there are several key assumptions [46]: (i) Specimen surface is half-infinitely large space elastic body. (ii) The strains are small and within the elastic limit. (iii) Elastic contact bodies composed of isotropic and homogeneous material. (iv) The surfaces are continuous and non-conforming (implying that the area of contact is much smaller than the characteristic dimensions of the contacting bodies). (v) The contact is frictionless and absence of adhesion or surface force. However, some of these assumptions may be violated in practice. Therefore, different versions of modified Hertz models have been developed (e.g. at large deformations [50, 51]). If there is lateral confinement (e.g. cell or bacteria trapped inside a micropatterned well to immobilize these living materials), the Hertz model will also become invalid and a modified model has been developed by combining the dimension analysis and numerical simulations [52]. Furthermore, the Sneddon model was developed for a pyramid or conical probe indenting a flat surface [45], which also requires the flat surface is sufficiently large. If the materials undergo the large deformation, some corrections are also required [50, 51]. If the materials may exhibit hyperelastic characteristics, the Sneddon’s solutions also need to be modified as demonstrated by the finite element simulations [53]. For example, by combining dimensional analysis and numerical simulations, Zhang et al. have proposed a modified version for Sneddon model [53]. When the friction force becomes important, the Sneddon model also needs to modified. Based on FE simulations and comprehensive analytical work, Lee et al. [54] has introduced a correction factor which is dependent on Coulomb friction coefficient, Poisson’s ratio and the contact shape.
If the sample has finite thickness, the rigid substrate will affect the apparent modulus during nanoindentation tests which is a common issue for coating on a rigid surface. In which case, the Hertz or Sneddon model will become invalidate. Similarly, when the sample has a finite width (e.g. nanobelt), Hertz model or Sneddon model will overestimate the measured apparent modulus of the sample [55]. To account for the finite thickness effect, a thin layer model has been developed for spread cells, which introduced empirical dimensionless parameters to correct the Hertz model [56].
On the other hand, the Sneddon model becomes invalid when the sample is curved (e.g. spherical shape). Spherical samples can be found in nature materials (e.g. biological cells [38, 57, 58]) and synthetic materials (e.g. drug powders [59, 60]). Even though the mechanical properties of materials are not affected by the geometry of the test specimen, the procedure to obtain material properties will vary. Several authors, such as Jackson and Green [61], Lin and Lin [62], have investigated the indentation of a hemi-sphere by a flat punch. However, there is no reliable theory of a sphere indented by various conical indenters available.
Therefore, the objective of this work is to develop a new model to address this issue. In this study, finite element methods have been adopted to systematically investigate indentation of spherical samples with different diameters by various conical indenters. Three new parameters were introduced by the dimension analysis to correct original Sneddon model for the flat surface with finite depth and spherical samples, which were validated against the experimental measurements for samples with different dimensions indented by various indenters.
Results and discussion
FE model validation using the control sample
When the sample size of a cylindrical sample or flat sample is considerably large than the indentation size, the Sneddon model should work for the linear elastic materials at small penetration [45]. Therefore, our first FE simulation on a cylindrical sample is to validate against the Sneddon model. As seen in Fig. 1a, when the relative indentation depth (RID), defined as the ratio of indentation depth over the sample height, is below 1%, there is an excellent agreement between the FE results and the Sneddon model. With the further increase of the indentation depth, the FE simulation starts to deviate from the Sneddon model. When RID is about 2%, the deviation between FE and Sneddon model is within 5%. This could be attributed to the effect of surface displaced inwards and slightly curved which became evident with the increase of penetration even if the penetration is still much smaller than the sample size [63]. Such a deviation also depends on the Poisson’s ratio of the sample which was also revealed by Hay et al. [63]. The Sneddon model can lead to ~ 15% underestimation of the maximum force when RID = 5% for the sample with the Poison’s ratio of 0.49. Further analysis has revealed that the deviation between the FEM and classical Sneddon model is correlated to the indentation depth and Poisson’s ratio. Based on similar dimensional analysis given in [50, 51], we obtain the empirical equations, as described in Eq. (1–3), by numerical fitting to FEM results. The new model can predict the force–displacement curves for a wide range of Poisson’s ratios. Typical examples are displayed in Fig. 1b for materials with low, intermediate and high Poisson’s ratios.
where the term \(\left( {1 + { \varphi }\gamma } \right)\) is an empirical correction parameter, h is indentation depth and H is the height of the sample.
where ν is the Poisson's ratio.

Modified Sneddon model for spherical samples
Our FE results have demonstrated that the Sneddon model significantly overestimates the indentation force even at very small relative indentation depth like 1%. Such a deviation is even more remarkable for materials with materials with bigger Poisson’s ratio (see Fig. S1 in Supplementary Information). This is due to more lateral deformation for materials with high Poisson’s ratio, which will further amplify the effect of finite width. We will not discuss it further. Instead, we would like to concentrate on understanding the mechanisms and focus on typical biomaterials with Poison’s ratio of 0.49. Our preliminary work has also demonstrated that the friction effect is insignificant if the friction coefficient is no more than 0.5 which is common in practice (see Fig. S2 in Supplementary Information). Therefore, we will not have further discussion about the friction effect and will focus on the results based on the frictionless contact.
Figure 2 displays the normalized force (ratio of FEM over the Sneddon model) for the spherical sample and its cylindrical counterpart with the same width and height, indented by an indenter with angle of 140°. In this case, the indentation of the cylindrical sample represents a flat sample with finite dimensions, while the spherical sample has finite dimension and geometrical effect.

The normalized force (ratio of FEM over the Sneddon model) for the spherical sample and its cylindrical counterpart with the same width and height, indented by an indenter with angle of 140°.
It is interesting to note that Sneddon model appears to well capture the indentation response of the cylindrical sample at the given RID (up to 5%). Similar to Fig. 1, when RID is below 1%, Sneddon model works well as expected. But we did not observe the normalized force increases with RID as occurred in Fig. 1. The contribution from rigid substrate and finite width are counter effective, which results in good fitting of Sneddon model even if the assumptions for the Sneddon model have been violated. When it comes to the indentation of a sphere, the effect of finite width dominates during the indentation process. That is why the Sneddon model always overestimates the force, particularly for bigger RID, as seen in Fig. 2.
Figure 3a–d show the normalized force (FEM results over the Sneddon model) for indenting the spherical samples with various diameters when using different conical indenters. Regardless of a wide range of sizes of spheres, the plotted curves for normalized force against relative indentation depth converge as a master curve. Sneddon model significantly overestimates the force compared to what was determined by FEM. Such an overestimation increases with the relative indentation depth and the indentation angle. At RID = 0.05, Sneddon model overestimates the force by about 1.5–3 times for 130°-160°. In other words, if one tends to use the Sneddon model to fit the experimental results in this case, a much lower apparent Young’s modulus will be obtained. Due to the geometry nature of spherical sample, the dimension effect discussed here is the combined effect of finite lateral and vertical dimension of spherical sample relative to the indentation penetration depth. The bluntness of the indenter and the increase of relative indentation depth can make the situation worse. Therefore, it is essential to modify the Sneddon’s model to extend its applications. Based on the numerical fitting to the plotted curves for normalized force vs relative indentation depth for all different indenters, it enables us to determine the empirical function \(f\left( \frac{h}{2R} \right)\) in Eq. (9). For simplification, a quadratic polynomial equation was adopted in this new model for the empirical function \(f\left( \frac{h}{2R} \right)\) and the coefficients could be correlated to the tip angle, as described in Eq. (4).
where R is the radius of the sample, \(\alpha\)(in radians) is semi-included angle of an indenter, \(a,b,c\) are the fitting coefficients determined by numerical fitting to FE results.

The normalized force (FEM results over the Sneddon model) for indenting the spherical samples with various diameters when using different conical indenters: tip angle: (a) 130°, (b) 140°, (c) 150°, (d) 160°.
Experimental validation for modified Sneddon model
Conical indentation tests on the flat samples and the spherical samples were conducted to examine the modified models as discussed before. The Poisson's ratio of PDMS was reported to be 0.40 to 0.50 [64, 65] and a value of 0.49 was adopted in this study. The Young’s modulus obtained from the indentation tests of the flat samples is 0.99 ± 0.08 MPa at a large deformation using the modified model, which is consistent with the results (1.08 ± 0.1 MPa) within measurement error determined by the original Sneddon model at a small deformation (i.e. relative deformation: 1%) as shown in Fig. S3 in Supplementary Information. It has shown that the new predictive model well captures the nanoindentation response of flat PDMS sample (R2 > 0.98). This is sensible if considering the possible roughness effect at small deformation. The results are consistent with Young’s modulus of PDMS reported elsewhere [66, 67]. While at large deformation, the Sneddon model yields the value of 1.27 ± 0.1 MPa (over 27% higher).
Figure 4 depicts the comparison of force-indentation depth curves obtained by experimental measurement, the new model (i.e. Equation (4)), and FEM results for indentation of different spherical samples using a 140° conical indenter. It has shown that the new predictive model agrees well with experimental data and FEM results for indenting the PDMS spheres. The Young’s moduli of spherical PDMS with different sizes (e.g. Diameter: 20 mm and 30 mm) determined by the new model (Eq. (4)) are 1.06 ± 0.08 MPa and 1.05 ± 0.06 MPa when using a 140° indenter (see Table 1), which are consistent within the measurement error. They are also in good agreement with what was determined for the flat surface (1.08 ± 0.1 MPa). In addition, the FEM results have a good agreement with the experimental data when using the Young’s modulus determined by the new model. However, it is evident that the apparent Young’s modulus determined by the Sneddon model is about half of what it should be, as seen in Table 1.

The comparison of force-indentation depth curves obtained by experimental measurement, the predictive model (i.e. Equation (4)), and FEM results for indentation of spherical samples with different diameters using a 140° conical indenter.
Due to the sample preparation, there might be a bit difference between the flat sample and spherical sample. Therefore, compression tests of the spherical sample (30 mm) at small strains were performed to get the benchmark value of Young’s modulus for 30 mm, which gives the Young’s modulus of 1.05 ± 0.06 MPa. Additional tests using indenters with different angles (e.g. 130° and 150°) were also performed. In which case, the new model yields the Young’s modulus of 1.12 ± 0.06 MPa and 1.15 ± 0.13 MPa, respectively. While the original Sneddon model gives the Young’s modulus of 0.48 ± 0.05 MPa and 0.51 ± 0.08 MPa, respectively. With the increase of the tip angle, the apparent modulus determined by the Sneddon model decreases, which agrees with FE simulations in Fig. 3. In contrast, the new models give consistent results in all cases (i.e. either changing sample size or indenter angles) (Fig. 4).
Conclusions
In this paper, we have demonstrated that Sneddon model works well for materials with big Poison’s ratio, when the indentation depth is below 1% of sample height for a flat sample with sufficiently large width. However, with the further increase of indentation depth, Sneddon model will overestimate the apparent modulus of the sample due to the effect from the rigid substrate. This issue is particularly significant for materials with smaller Poison’s ratio. Therefore, we have presented a semi-empirical model to determine Young’s modulus of samples with a flat surface at a larger indentation depth during indentation tests. It is interesting to note that, Sneddon model appears to capture the indentation response when indenting a flat surface with finite height and width, even if the assumptions of Sneddon model break down. This is due to the counter effect of the rigid substrate and the finite width. Whereas, for the spherical sample, due to the geometry effect, the sample depth and width sensed by indenter changes with the indentation depth. The finite width plays a dominant role throughout the indentation process, which is particularly significant for materials with high Poison’s ratio. Therefore, Sneddon model always tends to overestimate the force, particularly at higher relative indentation depth. Thus, a modified Sneddon model for conical indenters indenting spherical samples has been developed based on finite element simulations and dimension analysis. These new models enable reliable determination of Young’s modulus of a wide range of samples during indentation tests using different conical indenters. While the original Sneddon model can result in ~ 50% error in determining the apparent Young’s modulus of a spherical sample with the typical sizes here, even when the relative indentation depth is about 5%.
The modified Sneddon models for the contact between a conical indenter and a spherical sample bridges the gap between the Sneddon model and Hertz model. When the diameter of the spherical sample becomes infinitely big, it reduces to the form of Sneddon model. While when the indenter angle reaches 180°, it becomes the Hertz model.
The new models developed here are also applicable to nanoindentation on micro/nano spherical samples such as cell, bacterial, virus as well as some polymer beads and encapsulates for drug delivery. The new models developed here will be particularly useful for the atomic force microscope nanoindentations tests on micrometer scale spherical samples like coccus bacterium or archaeon.
Our future work will include the investigation of frictional contact for a wider range of indenters by following similar principles discussed by Lee et al. [54].
Materials and methods
Finite element modeling
Finite element models (FEM) have been developed to study the indentation of spherical samples using a variety of conical indenters. A cylindrical sample was also considered as a control sample. To improve the computational efficiency, we created axisymmetric model using commercial software ABAQUS/Standard 6.19. Figure 5 shows a representative FE model. In the model, the sample is bonded to the rigid plate. The indenter is also assumed rigid as it is far stiffer than the samples [16]. The interaction between the indenter and the sample is normal hard and tangential frictionless contact. The density of mesh increases towards the contact region between the indenter and sample. The diameters of the spherical samples are 0.5 mm, 1 mm, 2 mm, 4 mm, 8 mm, 16 mm, 32 mm, 64 mm, and the cylindrical sample size is 1 mm (Height)\(\times\) 2.5 mm (Radius). The angles of the indenters are 130°, 140°, 150°, 160°, 165°. These solid samples are assumed to be linear elastic, with Young’s modulus and Poisson’s ratio of 2 MPa and 0.49, respectively. CAX4RH element (A 4-node bilinear axisymmetric quadrilateral, hybrid, constant pressure, reduced integration, hourglass control.) is applied for these solid samples. Displacement control is used, and the maximum displacement applied is 0.05 mm. The Poisson’s ratio of the materials can also affect the mechanical response of the spherical samples. In this study, we focus on the typical soft biopolymers or biological cells. In which case, the relevant biopolymer samples are easier to fabricate for the experimental measurements. Therefore, for the most of simulations, we fix the Poison’s ratio as 0.49. The modeling framework developed here can be extended to other materials. To better illustrate the mechanisms of nanoindentation of spherical samples, we also run an additional simulation of cylindrical sample (diameter = height = 0.5 mm) as a comparison.

The representative FE model of indentation test with a conical indenter (Tip angle: 140°) for the spherical sample with diameter of 0.5 mm.
Analytical models
Depending on the indenter geometries, the force–displacement curves for an indentation test was commonly fitted by the Hertz model or Sneddon model to obtain the Young’s modulus of the materials. For the elastic contact between a spherical indenter and a flat surface (as seen in Fig. 6a), the force–displacement relation is given by Hertz model [46],
where R and h are the tip radius and indentation depth, respectively. And E* is the reduced modulus, which is given by,
where E and ν are the Young’s modulus and Poisson's ratio, where the subscript i and s refer to indenter and sample, respectively.

(a) The schematic of Hertz contact model between a rigid spherical indenter and a flat surface sample. The whole penetration depth is hmax, the depth of contact from the specimen free surface is ha, hc is the distance from the bottom of the contact to the contact circle. (b) The schematic of Sneddon model between a conical indenter and a flat surface sample. (c) Contact between a pyramid indenter (or conical indenter) and a spherical sample.
For a rigid indenter (\(E_{i} \sim \infty )\), Eq. (5) can be rewritten as follows:
For the elastic contact between a rigid conical indenter and a flat surface (see Fig. 6b), the contact force is given by [38]:
where \(\alpha\) is semi-included angle of an indenter.
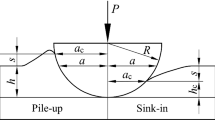
When it comes to the elastic contact between a conical indenter (or pyramid indenter) and a spherical sample (see Fig. 6c), none of the above models works. When the radius of a spherical sample is infinitely large, it is approaching the contact between conical indenter (a pyramid indenter) and a flat surface. Therefore, it is sensible to use the Sneddon model as a baseline. In principle, the deviation from the Sneddon model should be dependent on the tip angle, sample size and indentation penetration. It will be useful to use dimensionless parameters to replace these physical parameters. Therefore, we will adopt the same approach of the dimension analysis provided in [50]. Thus, we proposed the following model by modifying Eq. (8) for a rigid conical indenter indenting a spherical sample,
The empirical function \(f\left( \frac{h}{2R} \right)\) will be determined by FE simulations.
Experimental measurements for model validation
A mixture of Poly (dimethylsiloxane) (PDMS) and its curing agent was prepared using SYLGARD 184 Elastomer Kit (Dow Corning Corporation, Midland, MI) with a ratio of 10:1 (wt/wt). The solution was thoroughly mixed and degassed in a vacuum chamber for 30 min to eliminate air bubbles. The mixture was then injected into spherical molds and flat molds using a syringe to fabricate spherical samples (with a diameter of 20 mm and 30 mm) and flat samples (dimension: 25 mm n \(\times\) 25 mm). The PDMS was cured in an incubator at 35 °C for 24 h. After polymerization, the samples were carefully removed from the molds.
The indentation tests on both spherical samples and semi-infinite flat sample (control sample) were performed using EZ-SX Texture Analyzer (Shimadzu Corporation, Japan) fitted with a stainless-steel indenter (Tip angle: 140°,130°, 150°) and a flat plate under the ambient condition. Prior to the test, these samples were fixed onto the bottom plate. The maximum indentation depth of 1 mm with the rate of 1 mm/min was applied for the flat samples (Relative deformation: 5%). While the indentation depth of 2 mm was applied for 20 mm and 30 mm samples at the rate of 2 mm/min. The loading rate is low so that the measured modulus is approaching the equilibrium modulus (Young’s modulus). At least 5 measurements were made for the conical indenter. The results were presented as the average values with the standard deviations.
References
M.X. Cao et al., Preparation, microstructure and mechanical property of double-layered metal-ceramic hollow spheres. Mater. Sci. Eng. A 780, 139188 (2020)
M. Ferrari, V.T. Granik, Ultimate criteria for materials with different properties in biaxial tension and compression—a micromechanical approach. Mater. Sci. Eng. A 202(1–2), 84–93 (1995)
A. Kulkarni, D.K. Dwivedi, M. Vasudevan, Microstructure and mechanical properties of A-TIG welded AISI 316L SS-Alloy 800 dissimilar metal joint. Mater. Sci. Eng. A 790, 139685 (2020)
W. Wongkeo, A. Chaipanich, Compressive strength, microstructure and thermal analysis of autoclaved and air cured structural lightweight concrete made with coal bottom ash and silica fume. Mater. Sci. Eng. A 527(16–17), 3676–3684 (2010)
Z.P. Bazant, Size effect in blunt fracture—concrete, rock metal. J. Eng. Mech. Asce 110(4), 518–535 (1984)
G.M. Pharr, W.C. Oliver, F.R. Brotzen, On the generality of the relationship among contact stiffness, contact area, and elastic-modulus during indentation. J. Mater. Res. 7(3), 613–617 (1992)
W.C. Oliver, G.M. Pharr, An improved technique for determining hardness and elastic-modulus using load and displacement sensing indentation experiments. J. Mater. Res. 7(6), 1564–1583 (1992)
J.J. Chen, Indentation-based methods to assess fracture toughness for thin coatings. J. Phys. D 45(20), 203001 (2012)
J.J. Chen, On the determination of coating toughness during nanoindentation. Surf. Coat. Technol. 206(13), 3064–3068 (2012)
J.J. Chen et al., Experimental and modelling techniques for assessing the adhesion of very thin coatings on glass. J. Phys. D 42(21), 214003 (2009)
J.J. Chen, S.J. Bull, Approaches to investigate delamination and interfacial toughness in coated systems: an overview. J. Phys. D 44(3), 034001 (2011)
M.R. Ahmad et al., Nanoindentation methods to measure viscoelastic properties of single cells using sharp, flat, and buckling tips inside ESEM. IEEE Trans. Nanobiosci. 9(1), 12–23 (2010)
J. Chen, K.E. Wright, M.A. Birch, Nanoscale viscoelastic properties and adhesion of polydimethylsiloxane for tissue engineering. Acta. Mech. Sin. 30(1), 2–6 (2014)
Y.T. Cheng, C.M. Cheng, Relationships between initial unloading slope, contact depth, and mechanical properties for conical indentation in linear viscoelastic solids. J. Mater. Res. 20(4), 1046–1053 (2005)
C. Ganser et al., Combining adhesive contact mechanics with a viscoelastic material model to probe local material properties by AFM. Soft Matter 14(1), 140–150 (2018)
R. Han et al., Investigation on viscoelastic properties of urea-formaldehyde microcapsules by using nanoindentation. Polym. Test. 80, 106146 (2019)
D. Carnelli et al., Nanoindentation testing and finite element simulations of cortical bone allowing for anisotropic elastic and inelastic mechanical response. J. Biomech. 44(10), 1852–1858 (2011)
P.F. Duan et al., How cell culture conditions affect the microstructure and nanomechanical properties of extracellular matrix formed by immortalized human mesenchymal stem cells: An experimental and modelling study. Mater. Sci. Eng. C 89, 149–159 (2018)
Tsui, T.Y., et al., Nanoindentation and nanoscratching of hard carbon coatings for magnetic disks, in Mechanical Behavior of Diamond and Other Forms of Carbon, M.D. Drory, et al., Editors. 1995. p. 447–452.
A.V. Kulkarni, B. Bhushan, Nanoindentation measurements of amorphous carbon coatings. J. Mater. Res. 12(10), 2707–2714 (1997)
C.M. Chan et al., Nanoindentation and adhesion of sol-gel-derived hard coatings on polyester. J. Mater. Res. 15(1), 148–154 (2000)
Z.H. Xie et al., Deformation of a hard coating on ductile substrate system during nanoindentation: Role of the coating microstructure. J. Mater. Res. 21(2), 437–447 (2006)
L.H. Yi et al., Analyzing mechanical properties of a nanocrystalline Fe-Ni coating by nanoindentation. J. Mater. Res. 26(19), 2533–2542 (2011)
N.M. Jennett, G. Aldrich-Smith, A.S. Maxwell, Validated measurement of Young’s modulus, Poisson ratio, and thickness for thin coatings by combining instrumented nanoindentation and acoustical measurements. J. Mater. Res. 19(1), 143–148 (2004)
X.D. Li et al., Nanoindentation of silver nanowires. Nano Lett. 3(11), 1495–1498 (2003)
M. Lucas et al., Plastic deformation of pentagonal silver nanowires: comparison between AFM nanoindentation and atomistic simulations. Phys. Rev. B 77(24), 245420 (2008)
C.E. Carlton, P.J. Ferreira, Are dislocations present in nanoparticles?: Fourier filtering of images obtained from in-situ TEM nanoindentation. Microsc. Microanal. 15, 736–737 (2009)
C.E. Carlton, P.J. Ferreira, In situ TEM nanoindentation of nanoparticles. Micron 43(11), 1134–1139 (2012)
H.P. Wampler, A. Ivanisevic, Nanoindentation of gold nanoparticles functionalized with proteins. Micron 40(4), 444–448 (2009)
V. Vadillo-Rodriguez, T.J. Beveridge, J.R. Dutcher, Surface viscoelasticity of individual gram-negative bacterial cells measured using atomic force microscopy. J. Bacteriol. 190(12), 4225–4232 (2008)
R.G. Bailey et al., The interplay between cell wall mechanical properties and the cell cycle in Staphylococcus aureus. Biophys. J. 107(11), 2538–2545 (2014)
L. Wang et al., Effect of AFM nanoindentation loading rate on the characterization of mechanical properties of vascular endothelial cell. Micromachines 11(6), 562 (2020)
Q.S. Li et al., AFM indentation study of breast cancer cells. Biochem. Biophys. Res. Commun. 374(4), 609–613 (2008)
P. Muthukumaran, C.T. Lim, T. Lee, Estradiol influences the mechanical properties of human fetal osteoblasts through cytoskeletal changes. Biochem. Biophys. Res. Commun. 423(3), 503–508 (2012)
M. Plodinec et al., The nanomechanical signature of breast cancer. Nat. Nanotechnol. 7(11), 757–765 (2012)
S. Zhao et al., Elasticity of differentiated and undifferentiated human neuroblastoma cells characterized by atomic force microscopy. J. Mech. Med. Biol. 15(5), 1550069 (2015)
A.R. Harris, G.T. Charras, Experimental validation of atomic force microscopy-based cell elasticity measurements. Nanotechnology 22(34), 345102 (2011)
J.J. Chen, Nanobiomechanics of living cells: a review. Interface Focus 4(2), 20130055 (2014)
J. Chen, S.J. Bull, Relation between the ratio of elastic work to the total work of indentation and the ratio of hardness to Young’s modulus for a perfect conical tip. J. Mater. Res. 24(3), 590–598 (2009)
Y.T. Cheng, C.M. Cheng, Scaling approach to conical indentation in elastic-plastic solids with work hardening. J. Appl. Phys. 84(3), 1284–1291 (1998)
Y.T. Cheng, C.M. Cheng, Relationships between hardness, elastic modulus, and the work of indentation. Appl. Phys. Lett. 73(5), 614–616 (1998)
X.F. Wang et al., Identification of mechanical parameters of urea-formaldehyde microcapsules using finite-element method. Composites B 158, 249–258 (2019)
I.B. Topcu, M. Saridemir, Prediction of mechanical properties of recycled aggregate concretes containing silica fume using artificial neural networks and fuzzy logic. Comput. Mater. Sci. 42(1), 74–82 (2008)
L. Lu et al., Extraction of mechanical properties of materials through deep learning from instrumented indentation. Proc. Natl. Acad. Sci. U.S.A. 117(13), 7052–7062 (2020)
J. Harding, I. Sneddon, The elastic stresses produced by the indentation of the plane surface of a semi-infinite elastic solid by a rigid punch. Math. Proc. Camb. Philos. Soc. 41(1), 16–26 (1945)
K.L. Johnson, Contact Mechanics (Cambridge University Press, Cambridge, 1985).
A.C. FischerCripps, Elastic-plastic behaviour in materials loaded with a spherical indenter. J. Mater. Sci. 32(3), 727–736 (1997)
B. Liu, R. Villavicencio, C.G. Soares, On the failure criterion of aluminum and steel plates subjected to low-velocity impact by a spherical indenter. Int. J. Mech. Sci. 80, 1–15 (2014)
K.C. Tang, R.D. Arnell, Determination of coating mechanical properties using spherical indenters. Thin Solid Films 355, 263–269 (1999)
J.J. Chen, G.X. Lu, Finite element modelling of nanoindentation based methods for mechanical properties of cells. J. Biomech. 45(16), 2810–2816 (2012)
Y.Q. Xia, P.F. Duan, J.J. Chen, Modelling the nanomechanical responses of biofilms grown on the indenter probe. Processes 6(7), 84 (2018)
J.J. Chen, Understanding the nanoindentation mechanisms of a microsphere for biomedical applications. J. Phys. D 46(49), 495303 (2013)
M.G. Zhang et al., On the applicability of Sneddon’s solution for interpreting the indentation of nonlinear elastic biopolymers. J. Appl. Mech. Trans. Asme 81(9), 091011 (2014)
J.H. Lee et al., Stiffness of frictional contact of dissimilar elastic solids. J. Mech. Phys. Solids 112, 318–333 (2018)
Z.H. Xu, X.D. Li, Sample size effect on nanoindentation of micro-/nanostructures. Acta Mater. 54(6), 1699–1703 (2006)
E.M. Darling et al., A thin-layer model for viscoelastic, stress-relaxation testing of cells using atomic force microscopy: do cell properties reflect metastatic potential? Biophys. J. 92(5), 1784–1791 (2007)
N. Guz et al., If cell mechanics can be described by elastic modulus: study of different models and probes used in indentation experiments. Biophys. J. 107(3), 564–575 (2014)
Z.G. Li, Z.B. Zhang, C. Thomas, Viscoelastic-plastic behavior of single tomato mesocarp cells in high speed compression-holding tests. Innov. Food Sci. Emerg. Technol. 34, 44–50 (2016)
P. Narayan, B.C. Hancock, The relationship between the particle properties, mechanical behavior, and surface roughness of some pharmaceutical excipient compacts. Mater. Sci. Eng. A 355(1–2), 24–36 (2003)
R. Narayan, B.C. Hancock, The influence of particle size on the surface roughness of pharmaceutical excipient compacts. Mater. Sci. Eng. A 407(1–2), 226–233 (2005)
R.L. Jackson, I. Green, A finite element study of elasto-plastic hemispherical contact against a rigid flat. J. Tribol. Trans. Asme 127(2), 343–354 (2005)
L.P. Lin, J.F. Lin, A new method for elastic-plastic contact analysis of a deformable sphere and a rigid flat. J. Tribol. Trans. Asme 128(2), 221–229 (2006)
J.C. Hay, A. Bolshakov, G.M. Pharr, A critical examination of the fundamental relations used in the analysis of nanoindentation data. J. Mater. Res. 14(6), 2296–2305 (1999)
S. Dogru et al., Poisson’s ratio of PDMS thin films. Polym. Testing 69, 375–384 (2018)
S. Dogru et al., Impact of PDMS surface treatment in cell-mechanics applications. J. Mech. Behav. Biomed. Mater. 103, 103538 (2020)
Z.X. Wang, A.A. Volinsky, N.D. Gallant, Crosslinking effect on polydimethylsiloxane elastic modulus measured by custom-built compression instrument. J. Appl. Polym. Sci. 1, 150 (2014). https://doi.org/10.1002/app.41050
I.D. Johnston et al., Mechanical characterization of bulk Sylgard 184 for microfluidics and microengineering. J. Micromech. Microeng. 24(3), 035017 (2014)
Acknowledgments
R. Han acknowledges the PhD scholarship from Chinese Scholarship Council and Newcastle University. The authors also acknowledge Ian Kisby and his technician team at School of Engineering for the support of manufacture.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There are no conflicts to declare.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Han, R., Chen, J. A modified Sneddon model for the contact between conical indenters and spherical samples. Journal of Materials Research 36, 1762–1771 (2021). https://doi.org/10.1557/s43578-021-00206-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1557/s43578-021-00206-5